1241421
t-r, t. Bropoq выходной сигнал ИФ сигнала ИФ на величину прогноза разформируется сумматором 38 в результате корректировки первого выходного
ности между значениями этого сигнала в моменты времени t и t-. I ил.
I
Изобретение относится к радиотехнике, может быть использовано.для выделения полезной низкочастотной составляющей измеренных сигналов для последующего применения ее, напри- мер, в системах управления для компенсации контролируемьк возмущений объектов управления и является дополнительным к основному авт. св. К I 109891 .
Цель изобретения - повышение быстродействия.
На чертеже представлена структурная электрическая схема интерполиру-
ющего фильтра.
Интерполирующий фильтр содержит последовательно соединенные элемент 1 сравнения, ограничитель 2, первый интегратор 3, первый блок 4 задержки сумматор 5, второй интегратор 6, первый блок 7 вычитания, третий ин- тегратрр 8, второй блок 9 вычитания, первый масштабирующий элемент 10, четвертый интегратор 11, третий блок 12 вычитания, второй масйтабирующий элемент 13, пятый интегратор 14, четвертый блок 15 вычитания, блок 16 памяти, третий масштабирующий эле- мент 17, четвертый масштабирунлций элемент 18, пятый масштабирующий элемент 19, задатчик 20, первый, второй, третий и четвертый блоки 21- 24 умножения, первый дополнительный блок 25 вычитания, первый дополни- тельный блок 26 задержки, первый ключ 27, первый компаратор 2В, второ ключ 29, первый дополнительный сумматор 30, второй компаратор 31, второй дополнительный блок 32 задержки, второй дополнительный блок 33 вычитания, блок 34 деления, третий дополнительный блок 35 вычитания, дополнительный интегратор 36, дополнительный блок 37 умножения и второй дополнительный сумматор 38.
ности между значениями этого сигнала в моменты времени t и t-. I ил.
I
На чертеже обозначено: x(t) - входной сигнал устройства; xCt-t) - сглаженньШ сигнал на первом выходе устройства; x(t) - сглаженный сигнал на втором выходе устройства.
Интерполирующий фильтр работает следующим образом.
Входной сигнал x(t) предварительно сглаживается фильтром низкой частоты, состоящим из элемента 1 сравнения, ограничителя 2 и первого интегратора 3. С этой целью сигнал x(t) поступает на первый вход элемента 1 сравнения, где из него вычитается выходной сигнал фильтра низкой частоты x(t), поступающий с выхода первого интегратора 3. Полученная разность
-4(t)(t)-xVt)(1)
поступает на вход ограничителя 2, который может быть реализован, например, в виде усилителя с насьш1е- нием. Если сигнал б (t) превьш1ает величину ограничивающего напряжения |3, то в ограничителе 2 он ограничивается до этой величины. Это можно представить выражением
Гр, есл е(
S(t.(tl №,если )/i (2) -/i, если .,
где о (t) - выходной сигнал ограничителя 2.
Сигнал О (t) поступает на вход первого интегратора 3 и интегрируется в нем. С выхода первого интегратора 3 предварительно сглаженный фильтром низкой частоты сигнал x(t) подается на вход первого блока 4 задержки, где запоминается на интервал времени с . Сигнал x(t- c) с выхода блока 4 задержки поступает на первый вход c iTMMaTopa 5.
Первый выходной сигнал интерполирующего фильтра формируется путем
уточнения предварительно сглаженног сигнала х (t-t) по разностям между значениями этого сигнала и входного сигнала устройства на интервале времени rt-C-t- 11,
Jп LI
с этой целью сигнал о (t) с выхода ограничителя 2 поступает на вход второго интегратора 6, в котором он интегрируется. Сигнал с выхода второго интегратора 6 поступает на вход блока 16 памяти, в котором он задерживается на интервал времени . IT, и далее на вход первого блока 7 вычитания, в котором он вычитается из сигнала второго интегратора 6.
Сигнал с выхода первого блока 7 вычитания поступает на вход третьего интегратора 8, в котором он ин- тегрируется. Сигнал с выхода блока 16 памяти подается на вход третьего масштабирующего элемента 17, умножается в нем на коэффициент V и поступает далее на вход второго блока 9 вычитания, в котором он вычитается из сигнала с выхода третьег интегратора 8,.
Сигнал с выхода второго блока 9 вычитания поступает на вход первого масштабирующего элемента 10, умножается в нем на коэффициент у, 2 и подается далее на вход четвертого интегратора 11, в котором он интегрируется. Сигнал с выхода третьего масштабирующего элемента 17 подается на вход четвертого масштабирующего элемента 18, умножается в нем на коэффициент J о и поступает далее на вход третьего блока 12 вычитания, в котором он вычитается из сигнала с выхода четвертого интегратора 11 .
Сигнал с выхода третьего блока 12 вычитания поступает на вход второго масштабирующего элемента 13, умножается в нем на коэффициент и подается далее на вход пятого интегратора 14, в котором он интегрируется. Сигнал с выхода четвертого масштабирующего элемента 18 подается на вход пятого масштабирующего элемента 19, умножается в нем на коэффициент у 5 поступает далее на вход четвертого блока 15 вычитания, в котором он вычитается из сигнала с выхода пятого интегратора 14,
Коэффициенты усиления второго, третьего, четвертого и пятого интеграторов 6, 8, 11 и 14 устанавлира- ются равными единице.
Передаточная функция схемы, состоящей из блоков 6, 7 и 16, имеет вид
w,(p)i (1-Г),
(3)
0
5
где - передаточная функция интег}. ратора; 1 - передаточная функция блока
16 памяти,
а соответствующая импульсная характеристика
,10} Г 1 « если О в С ,. V 1 о, если .
Передаточная функция схемы, состоящей из блоков 6-9, 16 и 17 имеет вид
1 ., , Р ч УЯ ,-Р
0
w,(p):(i-r
)- А1 Г
. 1 пла.
ц(
а соответствующая импульсная характеристика
если О б если 9 С Передаточная функция схемы, состоящей из блоков 6-12, 16, 17 и 18, имеет вид
9 - рТ у 1 - f W,(p)fl (1-1 )
(5)
L
(6)
а соответствующая импульсная характеристика
если О если 9 Г Передаточная функция схемы, состоящей из блоков 6-19, имеет вид 2- 3 .. ,-рГ , 2 3 У) ,-Р
jnc 1 ика
«.(Q)S;
W,(P) (1-1
1
(7)
а соответствующая импульсная харак- Э
теристика Q
41:
(8)
Л
iKa 26
если О если б ь .
Сигналы с выходов блоков 7, 9, 12 и 15 вычитания поступают на первые входы соответствующих блоков 21-24 умножения, умножаются в них на коэффициенты Ig, 1,, Ij задаваемые с выхода задатчика на вторые входы блоков 21-24 умножения, и подаются далее на второй, третий, четвертый и пятый входы сумматора 5, в котором они суммируются, в результате чего получается сигнал ux(t-.
Импульсная характеристика схемы, входом которой является входной сигнал S (t) второго интегратора 6, а
выходом - результат суммирования
(t-o), имеет вид
((()+l 0,(0)+l,,CO/e)-t-l,0,(Q)
,0-n,e +i,9j, если .t- g
О
, если 0 о .,
а выхоцной ux(t- o) сигнал этой схемы формируется в соответствии с выражением .х,-j;
Ax(t-t) lco(s) S4t-9)d0 co(0)8Vt-0)d8., ° (10)
Коэффициенты 1, , 1,, 1 , U устанавливаются на выходе задатчика 20 таким образом, чтобы обеспечить желаемую весовую функцию, например, спадающую в будущее по экспоненте
1(, + 1,,9Ча(), (11) где а и (х; - постоянные коэффициенты.
Сигнал ux(t-o) с учетом (10) и (11) формируется в соответствии с выражением t о
ix(t-t) / а(1 -)S(t-0)de(2
Сигнал Ux(t-b) в первом сумматоре 5 суммируется с предварительно С1 ла- же1П1ым сигналом х (t-t), в результате чего получается первьш выходной сигнал интерполирующего .фильтра, .который представляет собой выделен- ную с запаздыванием полезную низкочастотную составляющую входного сигнала
ые
x(t-e)3i(t-t)+a f (1 -l)-(prx(t-0)-xV(t-0).. (13
3)
V(t- :)(t-t)
-v„
где - знаковая функция;
V - заданное пороговое значени
С выхода компаратора 31 сигнал V(t- c) подается на -первый вход второго ключа 29.
Ключи 27 и 29, первый дополнител ный сумматор 30 и компаратор 28 реализуют операцию-переключения. В компараторе 28 величина сигнала rii(t-c) сравнивается с величиной порога V(, . Если выполняется условие
,(t-) V,, . (18) . то с выхода компаратора 28 на вторы входы ключей выдается управляющий сигнал, замыкающий второй ключ 29 и размыкающий первый ключ 27. При этом на выходе первого ключа 27 сигнал равен нулю, а с выхода второго ключа 29 с}1имается сигнал
г де (f х (t-б)-X (t-0) определяется в соответствии с выражением (2).
Второй выходном сигнал интерполирующего фильтра x(t) формируется в результате корректировки первого выходного сигнала x(t- fc) на величину прогноза h(t) разности между значениями этого сигнала в ьюменты времени t и t- o
x(t)x()+h(t) , (14)
Сигнал прогноза h(t) в свою очередь образуется путем пересчета соответствующих разностей значений предварительно сглаженного сигнала с помощью уточняемого коэффициента
3(t), , .
h(t)d(t).x4t)-5(t-t). (15)
С этой целью в первом дополни- тельно.м блоке 25 вычитания из сигнала x(t), поступающего с выхода первого интегратора 3, вычитается выходной сигнал х (t- t) первого блока 4 задержки. Полученный сигнал о разности
|Ц (t))-x4t-:) (16)
задерживается в первом дополнительном блоке 26 згадержки на время IT , задержанный сигнал (t- c) поступает далее на первый вход первого ключа 27, вход первого компаратора 28 и вто.рого компаратора 31. Компаратор 31 реализует соотношение
если ju (t-t)0 , если ш (t- t)i О
(17)
V(t- c). Если указанное условие (18) не выполняется, то по сигналу с выхода компаратора 28 замык ается первый ключ 27 и размыкается второй ключ 29. При этом с выхода первого ключа 27 снимается сигнал m (t- cO , а на выходе второго ключа 29 сигнал равен нулю. Выходные сигналы ключей 27 и 29 суммируются в первом дополнительном сумматоре 30. Таким образом, на выходе сумматора формируется ср:;гнал Я, (t-7) , удовлетворяющий соотношению
h (ь-),если-У.:|и(1-г)У„ I L fli(t- c) - в противном случае
(19)
Первый выходной сигнал HffTepno- лирующего фильтра x() с
сумматора 5 подается на вход второго дополнительного блока 32 задержки, где запоминается на интервале времени t . Задержанный сигнал x(t-2 i;) вычитается во втором дополнительном блоке 33 вычитания из сигнала x(t- 2 ) и в блоке 34 деления полученная . разность- (t-T)x(t- ir)-x() делится на сигнал (t- o) с выхода .
x(t-)-x(t-2r) „ , .4
VoSi8n x(t-o)-x«(t-2C) (t-0-V,
x(t-C)-x(t-2T)
X(t-f)-X(t - 2) противном случае.
Величина сигнала dCt-f) на выходе блока 34 деления равна найденному с запаздыванием на время f коэффици- .енту пересчета, своевременное получение и использование которого в момент времени t- Г позволило бы по разности значений предварительно сглаженного сигнала «А, (t-t) дать точный прогноз разности значений первого выходного сигнала интерполирующего фильтра (1-С).
Сигнал d(t- o) поступает на вход апериодического фильтра, состоящего из дополнительного блока 35 вычитания и дополнительного интегратора 36, и экстраполируется с помощью этого апериодического фильтра на интервал времени сГ, Для этого в третьем дополнительном блоке 35 вычитания из сигнала dCt-C) вьтчита- ется выходной сигнал апериодического фильтра d(t), который подаете с выхода дополнительного интегратора 36. Далее полученная разность d(t)- -d(t- 2) подается на вход дополнительного интегратора 36 и интегрируется в нем. С выхода дополнительного интегратора 36 снимается экстраполированный на интервал времени коэффициент пересчета d(t).
Сигналы u(t) ;; d(t) с выходов первого дополнительного блока 25 вычитания и дополнительного интегратора 36 поступают на входы дополнительного блока 37 умножения и перемножаются. Таким образом реализуется соотношение.(15). На выходе дополнительного блока 37 умножения формируется сигнал корректировки h(t), который в соответствии с выражением (14) во втором дополнительном суммапервого дополнительного сумматора 3Q, С выхода блока 34 деления снимается сигнал
.
Выражение (20) с учетом (16), (17) и (19) может быть переписано в виде
(21)
20
торе 38 суммируется с первым выходным сигналом x() интерполирующего фильтра.
С выхода второго дополнительного сумматора 38 снимается второй выходной сигнал интерполирующего фильтра J- x(t), который представляет собой оценку полезной низкочастотной сос- тавляющей входного сигнала в текущий момент времени t.
Таким образом, введение новых, блоков и связей позволяет исключить запаздывание в получении оценок полезной низкочастотной составляющей измеренных сигналов и, тем самым, обеспечивает возможность применения предлагаемого устройства в разнооб- 5 разных системах управления, когда требуется вьщеление полезной составляющей измеренных сигналов в темпе с их поступлением на вход устройства.
Формула изобретения
Интерполирующий фильтр по авт. св. 1109891, отличающий- с я тем, что, с целью повьшения
5 быстродействия, в него введены три дополнительных блока вычитания, два дополнительных блока задержки, два компаратора, два ключа, два допол-. нительных сумматора, блок деления,
0 дополнительный интегратор и допол-- нительный блок умножения, при этом первый вход первого дополнительного . блока вычитания подключен к выходу первого интегратора, второй вход под5 ключей к выходу первого блока задержки, а выход подключен к первому ;входу дополнительного блока умножения и через первый дополнительный
блок задержки подключен к входу первого компаратора, к входу первого ключа и к входу второго компаратора, выход которого подключен к входу второго ключа, управляющий вход которого подключен к выходу первого компаратора, объединенного с управляющи входом первого ключа, а выход подключен к первому входу первого дополнительного сумматора, второй вход которого подключен к выходу первого ключа, а выход подключен к первому входу блока деления, второй вход которого подключен к выходу второго дополнительного блока вьиитания, а выход подключен к первому входу третьего дополнительно го блока вычитания, выход которого через дополнительный интегратор подключен к второму входу третьего дополнительного блока вычитания и к второму входу дополнительного блока умножения, выход которого подключен к первому входу второго дополнительного сумматора, второй вход которого подключен к выходу сумматора и объединен с входом второго дополнительного блока зад,ержки и с первым входом второго дополнительного блока вычитания, второй вход которого подключен к выходу второго дополнительного блока задержки.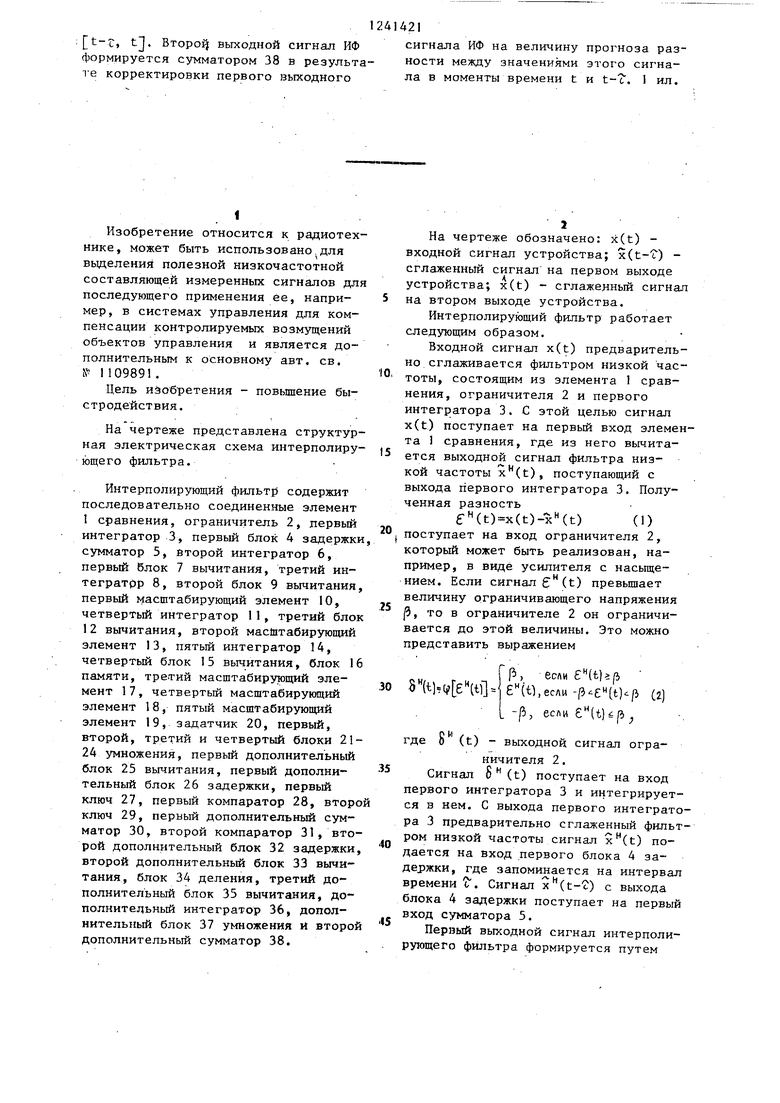
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполирующий фильтр | 1983 |
|
SU1109891A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Управляемый фильтр | 1981 |
|
SU970644A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Сглаживающий фильтр | 1983 |
|
SU1211853A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Управляемый фильтр | 1984 |
|
SU1149214A1 |
| Интерполирующий фильтр | 1987 |
|
SU1510071A1 |

| Интерполирующий фильтр | 1983 |
|
SU1109891A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
