.(54) ПРОГНОЗИРУЮЩИЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ Изобретение относится к автоматическому управлению и регулированию и может быть использованно для портроения систем управления техническими объектами. Передаточная функция каналов регулирования рассматриваемого класса объектов . .,.,, где к - коэффициент усиления;Т t.T постоянные времени, представлена последовательным соединением инерционногр звена первого порядка, звена .чистого запаздывания и интегрирующего звена с отсечкой. Объект управления подвержен влиянию контролируемых возмущений, которые характеризуются циклической нестационарностью. Примером такого рода объектов является современная доменная печь, если рассматривать задачу компенсации контролируемых возмущений, влия ющих на основность шлака. В этом случае последовательным соединением инерционного звена первого порядка и звена чистого запаздывания аппрок симируется часть доменной печи от к СТРУКТУРОЙ лошника до горна. Горн доменной печи аппроксимируется интегрирующим звеном с отсечкой. КонтролируемЕлии возмущениями являются изменения химического состава и массы шихтовых материалов, управляющим воздействуем - расход флюсирующих добавок с различным эффектом действия, известняк повышает основность ишака, а кварцит ее понижает. Циклическая нестационарнбсть контролируемых возмущений обусловлена такой последовательностью загрузки в печь отдельных видов шихтовых мате1риалов, которая образует технологические циклы, причем длительность технологического цикла равна или меньше времени .. Задача управления заключается в минимизации величины управляемого воздействия при условии выполнения ограничений на отклонения выходной переменной объекта от заданного значения. Применительно к доменной печи задача управления состоит в минимизации расхода флюсирующих добавок при условии, что основность шлака будет находиться в заданных пределах. Известна система автоматического уп1}авления для компенсации контролируемых возмущений, содержащая объект управления, быструю модель объекта управления, блок задания .начальных условий, экстраполятор контролируемых возмущений, блок формирования- си нала управления моделью, согласующее устройство, блок синхронизации и контакты 13. Недостатком этой системы являютс ее сложность, обусловленная необходимостью моделирования в увеличенном масшт-абе времени и реализации п исковых процедур оптимизации. Наиболее близким по технической сущности к предлагаемому является п гнозирующий регулятор, содержащий последовательно включенные первый фильтр низкой частоты, первый масшт бирующий блок, первый блок задержки первый блок сравнения, третий фильт низкой частоты, первый экстраполятор, второй сумматор, исполнительны блок, четвертый фильтр низкой часто ты, четвертый блок задержки, восьмой блок сравнения и блок адаптаци выход которого соединен с выходом первого масштабирующего блока, последовательно включенные пятый блок сравнения, третий блок задержки, третий блок сравнения, инерционное SBeHO первого порядка, второй масшт бирующий блок и первый сумматор, последовательно включенные шестой блок сравнения, выход которого соед нен с входами первого и восьмого блоков задержки, последовательно включенные вторые экстраполяторы, четвертые блоки сравнения и четвертые масштабирующие блоки, выходы которых подключены к входам первого сумматора, последовательно включенные вторые блоки задержки, вторые блоки сравнения и втоЕУые блоки адаптации, своими выходами подключенные к дополнительным входам первого и вторых экстраполяторов, выходы которых соединены с входами вторых блоков задержки, пятые блоки задержки, подключенные входами к выходу пятого блока сравнения, а выходами к входам четвертых блоков сравнения выход первого масштабирующего блока соединен с входом второго сумматора и одним входом пятого блока сравнения, другой вход которого подключен к выходу четвертого фильтра низкой частоты, выход первого блока сравнения соединен с выходом третьего блока сравнения, выход третьего фильтра низкой частоты - с входами вторых экстраполяторов и с входами вторых блоков сравнения, выход четвертого блока задержки - с входом седьмого блока сравнения, выход пятого блока сравнения - с входом од ного из четвертых блоков сравнения, выход первого сумматора - с входом второго сумматора 2j Прогнозирующий регулятор предназначен для компенсациикак контроируемых, так и не контролируег/их возмущений. С точки зрения подавления контролируемых возмущений в этом егуляторе не минимизируется величина управляющего воздействия с выполнением требований на точность регуирования, что является его недостатком. Цель изобретения - минимизация величины управляющего воздействия при заданной точности регулирования. Поставленная цель достигается тем, что Б прогнозирующий регулятор, содержащий сумматор, два входа которого через соответствующие масштабные блоки подключены к выходам первого и второго фильтров, а выход - к первому входу первого блока сравнения, второй вход, которого соединен через третий фильтр с выходом исполнительного блока, последовательно соединенные первый блок задержки, второй блок сравнения, экстраполятор, второй блок задержки и третий блок сравнения, второй вход которого соединен с выходом второго блока сравнения, последовательно соединенные четвертый фильтр, четвертый блок сравнения и третий масштабный блок, а также последовательно соединенные третий блок задержки, пятый блок сравнения, инерционное звено и четвертый масштабный блок, введены два интегратора, опреде-. литель модуля, задатчик, ключ последовательно соединенные первый умножитель , второй сумматор и пятый масштабный блок, а также последовательно соединенные реле, четвертыйблок задержки и второй умножитель, второй вход которого соединен с выходом реле, а выход - с управляющим входом ключа, информационные вход и выход которого подключены соответственно к выходу четвертого масштабного блока и к второму входу второго сумматора, выход пятого масштабного блока подключен к входу исполнительного блока, первый вход первого умножителя соединен с выходом экстраполятора, а второй вход - с выходом третьего масштабного блока, выход задатчика подключен к второму входу четвертого блока сравнения, вход и выход определителя модуля соединены соответственно с выходом третьего блока сравнения и с входом четвертого фильтра, вход первого интегратора соединен с выходом первого сумматора, а выходс входом первого блока задержки и с вторым входом второго блока сравнения, вход второго интегратора соединен с выходом первого блока сравнения, а выход - с сходом третьего блока задержки и с вторым входом пятого блока сравнения, вход реле
соединен с выходом инерционного звена.
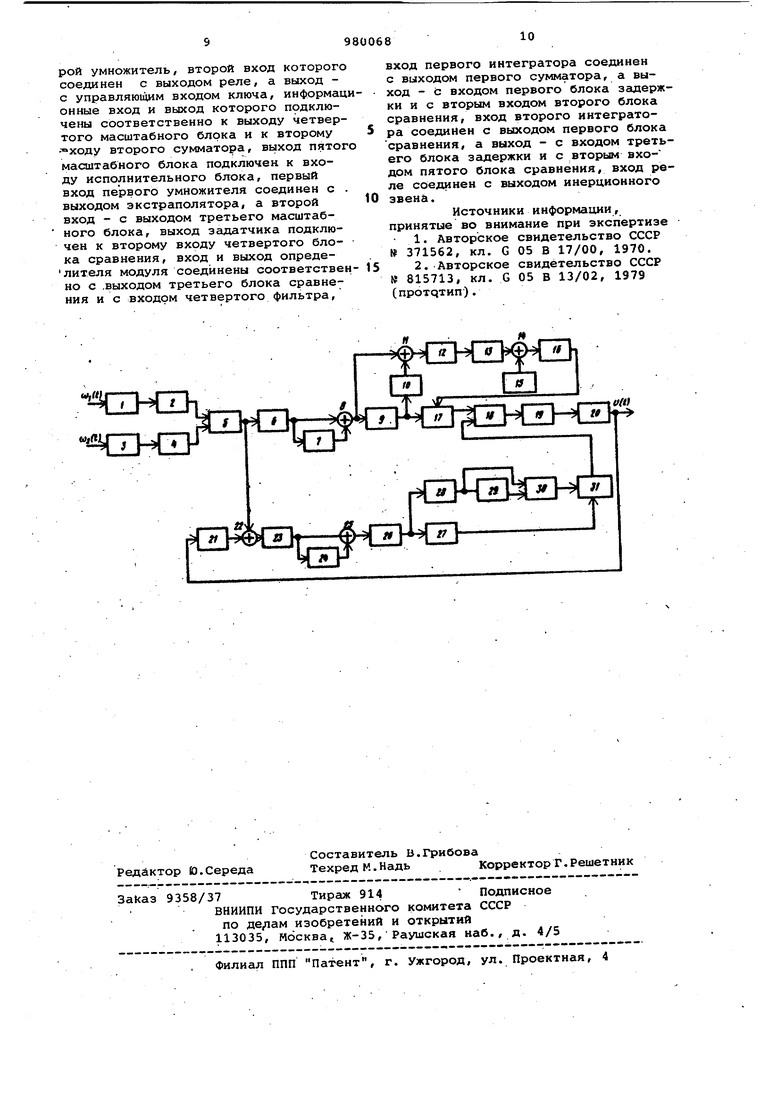
На чертеже представлена схема предлагаемого прогнозирующего регулятора с переменной структурой.
Прогнозирующий регулятор содержит фильтр 1 низкой частоты, масштабирующий блок 2, фильтр 3 низкой частоты, масштабирующий блок 4, сумматор 5 интегратор 6, блок 7 задержки, блок 8 сравнения, экстраполятор 9, блок 10 задержки, блок 11 сравнения, блок 12 определения модуля, фильтр 13 низкой частоты, блок 14 сравнения, задатчик 15, масштабирующий блок 16, блок 17 умножения, сумматор 18, масштабирующий блок 19, исполнительный блок 20, фильтр 21 низкой частоты, блок 22 сравнения, интегратор 23, блок 24 задержки, блок
25сравнения, инерционное звено 26, масштабирующий блок 27, реле
26трехпозиционное, блок 29 задержки, блок 30 умножения, ключ 31.
На чертеже приняты обозначения; W(t) и W(t) - первое и второе контролируемые возмущения в t-ый момент времени, ) - управляющее воздействие.
Регулятор работает следующим образом.
Измеряемый сигнал об изменениях первого контролируемого возмущения w(t) поступает на фильтр 1 низкой частоты, реализованный например в виде последовательно соединенных блока сравнения, усилителя с насыщением и интегратора, выход которого соединен с входом блока сравнения. В фильтре 1 низкой частоты подавляется восокочастотная измерительная помеха сигнала W(t), и далее он поступает на масштабирующий блок 2, где умножается на постоянный коэффициент пересчета изменений контролируейых возмущений в изменения управляющего воздействия. Пересчитанный таким образом в масштаб управляющего воздействия сигнал поступает на один вход сумматора 5. Аналогично измеряемый сигнал об изменениях второго конролируемого возмущения N,(1) с помощью фильтра 3 низкой частоты и масштабирующего блока 4 пересчитывается в масштаб управляющего воздействия и поступает на другой вход сумматора 5. По аналогии может быть учтено и ббльшее количество контролируемых возмущений.
Выходной сигнал сумматора 5 о величине управления, требуемого для ко пенсации изменений V;-,(t) и Vi,j(t) подается на вход интегрального з-вена с отсечкой с передаточной функцией
Wv.). . Это звено реализуется с помощью
интегратора 6, блока 7 задер/кки и блока 8 сравнения. Сигнал с виходп интегратора 6через блок 7 задержки подается на вход блока 8 суаынения, где и вычи-тается из выходного сигн-з- ла интегратора 6. В результате на выходе блока В сравнения получается сигнал о суммарном за время технологического цикла t изменении управляющего воздействия из-за изменений контролируемых возмущений. .Этот сигнал экстрополируется в экстраполяторе 9, например в виде форсирующего звена, на предстоящий технологический цикл и поступает на
5 блок 17 умножения, где умножается на весовой коэффициент, величина которого адаптируется в зависимости от точности экстраполяции.
Для адапта-ции весового коэффициента выходной сигнал экстраполятора 9
0 задерживается на время экстраполяции в блоке 10 задержки и вычитается в блоке 13. сравнения из вьлход ного сигнала экстраполятора 9. Сй-fнал о полученной разности с выхода
5 блока 11 сравнения поступает через блок определения модуля 12, где устраняется знак этого сигнала, на фильтр 13 низкой частоты. В результате на выходе фильтра 13 низкой час0тоты получается сигнал о текущем среднемодульном отклонении на скользящем интервале времени,длина которого определяется настройками фильтра 13 низкой частоты. Выходной сиг5нал фильтра 13 низкой частоты вычитается в блоке 14 срар :ения из си1- нала, поступающего с задатчика 15. Сигнал о результате вычитания умножается в масштабирующем блоке 16 на по0стоянный коэффициент и подается на вход блока 17 умножения. Таким образом, если величина ошибки экстраполяции болъшая, то большая и величи 1а среднемодульного отклонения,
5 а величина выходного сигнала блока 14 сравнения становится маленькой, и сигнал с выхода экстраполятора 9 умножается на маленькую величину. Если же ошибка экстраполяции маленькая ,. то экстраполированный сигнал ум0ножается на большую величину, стремящуюся в пределе к единице.
Сигнал об управляющем воздействии U(t) с выхода исполнительного блока
5 20 через фильтр 21 низкой частоты, в котором подавляется высокочастотная помеха, подается на блок 22 сравнения, где из него вычитается выходной сигнал сумматора 5. В результате
0 получается сигнал о разности между требуемым с точки зрения полной компенсации изменений контролируемых возмущений и фактически регшизованным управлением. По этой разности прогно5зируется с помощь-ю модели канала регулирования суммарное за технологический цикл отклонение выходной переменной объекта управления. Если сумматорное отклонение превышает на конечном интервале времени допустимый диапазон, то сигнал о разности подсуммируется к выходному сигналу блока 17 умножения. Если суммарное отклонение лежит в допустимом диапазоне, то в последующих расчетах разHocTb между требуемым и фактическим 0 управлением не учитывается.
Выходной сигнал блока 22 сравнения подается на вход интегратора 23(на интеграторе 23,блоке 24 задержки и блоке 25 сравнения реализовано интегральное 15 звено с отсечкой ). Из выходного сигнала интегратора 23 в блоке 25 сравнения вычитается выходной сигнал этого же интегратора 23, задержанныйв блоке 24 задержки на интервал време-20 ни На выходе блока 25 сравнения получается сигнал о суммарной на интервале разности между требуемым и фактическим управлением , этот сигнал подается на инерционное 25 звено 26, реализованное в виде интегратора, охваченного отрицательной обратной связью.
С выхода инерционного звена 26 сигнал об отклонении выходной переменной -jn объекта управления подаётся на вход трехпозиционного реле 28, функционирование которого описывается выражением -И при Vg(t)/A,2J
о при (i)A,
вых( - при ),
в котором :)вых ( вх. соответствен- но выходной и входной сигналы реле А - постоянная величина.
- .(
исходной сигнал трехпозиционного еле 28 задерживается в блоке 29 заержки на интервал времени t и поается на вход блока 30 умножения, 45 где умножается на выходной сигнал рехпозиционного реле 28 в текущий моент времени. При отклонении входноо сигнала реле 28 сверх допустимого иапазона в одну сторону в моменты сп ремени t и t-tjвыходной сигнал второго блока умножения равен величине +±. Во всех других случаях этот сигнал равен величине О или -1. В случае, когда величина выходного сигнала блока 30 умножения равна +1 ключ 31 замыкается и соединяет выход асштабирующего блока 27 с входом сумматора 18. Тем самым меняется структура всего прогнозирующего егулятора. Выходной сигнал инерци-. 60 онного звена 26 идет на масштабирующий блок 27 (П-регулятор ), где умножается на постоянный коэффициент и поступает (когда ключ 31 замкнут ) на вход сумматора 18,в котором суммируется 65
с выходным сигналом блока 17 умножения. Выходной сигнал сумматора 18 является суммарным управлением на весь технологический цикл. В масштабирующем блоке 19 этот сигнал умножается на величину, обратно пропорциоJ aльнyю длительности технологического цикла, то есть суммарное управление распределяется по длительности цикла. .Сигнал о полученном управлении подается на исполнительный блок 20 для реализации.
Введение новых блоков и связей в предлагаемом регуляторе позволяет минимизировать величину управляющего воздействия при выполнении ограничений на величину отклонения выходной переменной объекта управления. Например, при стабилизации основности шлака доменного процесса, как показывают результаты моделирования, применение предлагаемого пронозирующего регулятора позволяет снизить по сравнению с известным регулятором расход флюсующих добавок на 20-30% при заданной точности регулирования. В результате повышается производительность доменной печи на 1-1,5% и с ижается расход кокса на 0,3-0,5 кг/т, что в свою очередь, дает экономический эффект порядка 200 тыс,руб. в год на одну доменную печь большого объема.
Формлула изобретения
Прогнозирующий регулятор с переменной структурой, содержащий сумматор, два входа которого через соответствующие масштабные блоки подключены к выходам первого и второго фильтров, а выход - к первому входу первого блока сравнения, второй вход которого соединен через третий фильтр с выходом исполнительного блока, последовательно соединенные первый блок задержки, второй блок сравнения, экстраполятор, второй блок задержки и третий блок сравнения, второй вход которого соединен с выходом второго блока сравнения, последовательно соединенные четвертый фильтр четвертый блок сравнения и третий масштабный блок, а также последовательно соединенные третий блок задержки, пятый блок сравнения, инерционное звено и четвертый масштабный блок, отличающийся тем, что,,с целью минимизации управляющего воздействия, в регулятор введены два интегратора, определитель модуля, задатчик, ключ, последовательно соединенные первый умножитель, второй сумматор и пятый масштабный блок, а также последовательно соединенные реле, четвертый блок задержки и второй умножитель, второй вход которого соединен с выходом реле, а выход с управляющим входом ключа, информаци онные вход и выход которого подключены соответственно к выходу четвертого масштабного блока и к второму «ходу второго сумматора, выход пятого масштабного блока подключен к входу исполнительного блока, первый вход первого умножителя соединен с . выходом экстраполятора, а второй вход - с выходом третьего масштабного блока, выход эадатчика подключен к второму входу четвертого блока сравнения, вход и выход определителя модуля соединены соответственно с .выходом третьего блока сравнения и с входом четвертого фильтра.
вход первого интегратора соединен с выходом первого сумм)атора, а выход - с входом первого блока задержки и с вторым входом второго блока сравнения, вход второго интегратора соединен с выходом первого блока сравнения, а выход - с входом третьего блока задержки и с вторым входом пятого блока сравнения, вход реле соединен с выходом инерционного эвен&.
Источники информации, принятие во внимание при экспертизе 1. Авторское свидетельство СССР 371562, кл. G 05 В 17/00, 1970.
2. Авторское свидетельство СССР W 815713, кл. G 05 В 13/02, 1979 (протчтип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| РЕГУЛЯТОР | 2011 |
|
RU2448354C1 |
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
