ми (минимальное значение взвешенной суммы входных иеременных или просто взвешенной суммы) максимально. Для каждой функции, реализуемой пороговым элементом, существует свое максимальное значение минимальной взвешенной суммы. Погрешность, с которой ироизвольный вектор структуры равен оптимальному, оценивается отноилеиием значения минимальной -взвешенной суммы для да;нного вектора к величине минимальной взвешенной суммы для оптимального вектора. Это отношение меньше или равно 1. В последнем случае произвольиый вектор совпадает с оптимальным.
Так как оптимальный вектор заранее не известен и, следовательно, не известно максимальное значение миинмальной взвешенной суммы, то проконтролировать в явном виде в ходе вычислительного процесса, с какой погрешностью текущий вектор структуры равен оптимальному, невозможно. Кроме того, невозможно для любой функции, подлел :аш,ей реализации пороговым элементом, точно определить время, по истечении которого значение погрешности равенства текуш,его и оптимального векторов впервые достигает заданной величины. Поэтому в известном устройстве, выходами которого являются выходы блоков интегрирования, считывание показаний может производиться только через такое время, по истечении которого гарантируется, что указанная погрешность уже не может быть больше некоторой наперед задащной величилы, т. е. лроцесс заканчивается тогда, когда вектор структуры вошел в область доиусти.мой погрешности и не сможет уже из нее выйти. Это времябольше того времени, по истечении которого гарантируется, что заданная величина точности была достигнута хотя бы один раз за любое, каа угодно короткое, время.
Цель изобретения - повышение быстродействия устройства.
Поставленная цель достигается тем, что в устройство введены дополнительный блок определения скаля-рных произаедений векторов, первый вход которого соединен с выходом блока определения центра тяжести векторов, второй вход соединен с выходом блока интегрирования, указатель максимума, вход которого соединен с вы.ходом дополнительного блока определения скалярных произведений векторов, и блок памяти, вход которого соединен с выходом блока интегрирования, управляющий вход подключен к выходу указателя максимума, а выход соединен с выходом устройства.
Дополнительный блок определения скалярных произведений векторов вычисляет значение минимальной взвешенной суммы для текуш,его вектора структуры. Это значение взвешенной суммы анализируется на максимум с помопдью указателя макскмума. Выходной сигнал последнего равен 1, если сигнал на его входе больше, чем все предыдущие значения, и равен О в противном случае.
Блок запоминания вектора работает таким образом, что, если управляющий сигнал с указателя максимума равен 1, то его выходные сигналы всегда равны соответствующим сигналам с выходов блока иитегрирования. Еслн же сигнал с указателя максимума равен О, то выходные сигналы блока памяти не изменяются и сохраняют те же значения, которые были в момент последнего ио времени изменения значения сигнала с указателя максимума с 1 на 0.
Благодаря введе-нию в устройство указанных трех блоков на его выходе всегда ирисутствует вектор структуры, для которого мииимальная взвешенная сумма входов имеет максимальное значение за все время процесса выч11слений, т. е. вектор структуры, равный оптимальному с наименьшей погрешностью, которая была достигнута за весь ироцесс вычислений. Поэтому съем иоказаний с данного устройства можно осуществлять через такое время, о которо.м известно, что в течение его суш,е-ст.вовал хотя бы один момент, когда вектор структуры равнялся оптимальному с заданной погрешностью. Это время всегда меньше времени, через которое снимаются показания в известном устройстве, так. как последнее рассчитывается из условия, чтобы вектор структуры, войдя в область допустимой погрешности, никогда бы из этой области не мог выйти. Па чертеже показана блок-схема предлагаемого устройства.
Для большей наглядности эта схема представлена в векторной форме, где совокупность блоков, выполняющих определенную функцию над компонентами векторов, заменяется одним блоком, выполняющим соответствующую операцию над вектором в целом.
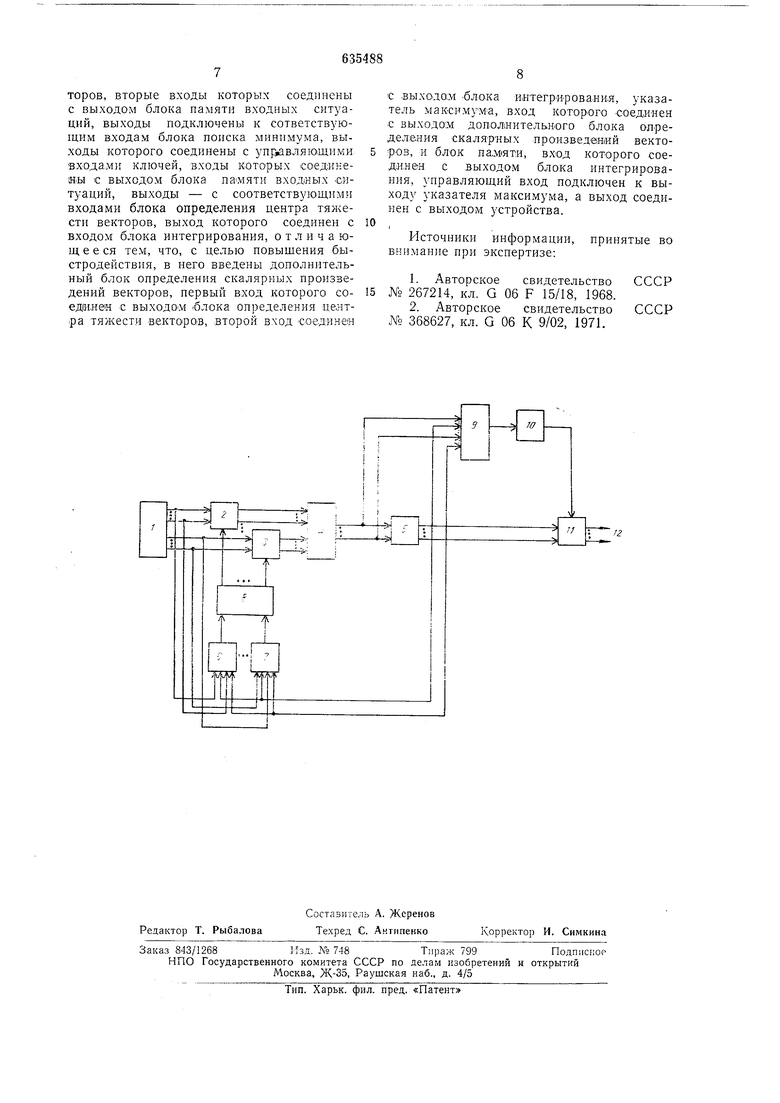
Устройство содержит блок / памяти входных ситуаций, ключи 2, 3, блок 4 определения центра тяжести векторов, блок 5 интегрирования, блоки 6, 7 определения скалярных произведений, блок 8 поиска минимума, блок 9 определения скалярных произведений, указатель 10 максимума, блок // памяти.
Блок / представляет собой запоминающее устройство (аналоговое или цифровое), имеющее ряд выходов, количество которых определяется размерностью и числом входных ситуащий (входных векторов), на которых опеределена функция, подлежандая реализации пороговым элементом. Значения координат всех входных векторов для заданной функции записываются в блок / перед вычислением оптимальной структуры порогового элемента. 5 Через ключи 2, 3 входные векторы из блока / МОгут подаваться на вход блока 4. Блок 5 представляет собой совокупность одновходовых блоков интегрирования. Каждый из блоков 6, 7 содержит двухвходовые узлы перемножения, выходы которых объединены на входе сумматора. Выход сумматора является выходом всего блока. Указатель W максимума включен между выходом блока 9 и управляющим входом блока // памяти. Последний представляет собой регистр аналоговой памяти с ключами на входе, которые управляются сигналом с выхода указателя 10 максимума. Процесс вычисления оптимального вектора структуры порогового элемента происходит следующим образом. В блок / памяти входных ситуаций предварительно записываются все координаты всех входных векторов, иа которых определена заданная функция, подлежащая реализации пороговым элементом. Блоку 5 интегрирования задаются начальные условия (блок задания начальных услов,ий на схеме 1не показан), ,в качестве котор 1х используется один (любой) из входных векторов. После этого начальный вектор структуры на выходе блока 5 интегрирования перемножается скалярно со всеми входными векторами в блоках 6, 7, на выходах которых образуются значения всех взвешенных сумм входных переменных. Указанные значения анализируются блоком 8 поиска минимума. У этого блока возбуждаются те выходы, которым соответствуют минимальные значения взвешенных сумм на входе. Возбужденные выходы блока 5 поиска минимума открывают соответствующие ключи 2, 3 и соответствующие этим ключам входные векторы поступают на входы блока 4. На выходе последнего образуется вектор, значение каждой координаты которого равно среднему арифметическому значений соответствующих координат всех входных векторов. Этот вектор, дающий минимальную взвепаенную сумму, поступает на входы блока 5 интегрирования, в результате чего выходные сигналы последнего изменяются. При изменении выходного вектора блока интегрирования изменяются значения скалярных произведений этого вектора со всеми входными векторами, в результате чего изменяется соотнощение сигналов на выходах блоков 6, 7 определения скалярных произведений векторов. При этом оказываются открытыми какие-либо другие из ключей 2, 3 и другие входные векторы подаются из блока / на вход блока 4, что приводит, к изменению входных сигналов блока 5 интегрирования. Благодаря тому, что на входе этого блока всегда присутствует вектор, дающий минимальную взвещенную сумму входных переменных, изменение выходного вектора блока 5 происходит в сторону увеличения абсолют ;ого значения минимальной взвешенной суммы. Однако это изменение происходит немонотонно. Блок 9 определения скалярных произведений векторов вычисляет абсолютное значен1 е минимальной взвешенной суммы входов, которое анализируется указателем 10 максимума. Если входной сигнал этого блока больше, чем все предыдущие значения, то его выходной спгнал равен единичному значению. При этом выходной вектор блока // равен выходному вектору блока 5 интегрирования. Если вектор .на выходе этого блока изменится так, что абсолютное значение минимальной взвешенной суммы умекьшлЕТся, то сигнал с выхода указателя 10 максимума станет равен нулю. При этом вектор на выходе блока // зафиксируется. Дальнейщее изменение этого вектора возможно только в случае, когда изменение выходного вектора блока 5 интегрирования приводит к увеличению последнего наибольшего значения минима,1ьной взвешенной суммы. Таким образом, иа выходе 12 устройства всегда присутствует вектор структуры, для которого значение минимальной взвешенной суммы максимально за все прошедшее время вычислений. Поэтому снимать показания с устройства можно по истечении времени, внутри которого был хотя бы один момент, когда текущий вектор структуры равнялся оптимальному с заданной погрешностью. Это время всегда меньше времени, по истечении которого погрешность равенства текущего вектора структуры оптимальному вектору не выходит за допустимые пределы. Сокращение времени вычисления оитимального вектора структуры существенно расщиряет сферу ирименения пpeдлaгae oго устройства. С помощью этого устройства часто приходится решать системы из ста и более неравенств с таким же количеством неизвестных. Такие задачи встречаются, например, при расчете блоков взвешенного суммирования в спектральных преобразователях .матричного типа. Выигрыш во времени вычисления оптимального вектора структуры для таких сложных задач при использовании изобретения может быть существенным. Ф о р м } л а изобретения Устройство для вычис.тения оптимальной структуры пороговых элементов, содержащее блок интегрирования, выход которого подключен к первым в.ходам блоков определения скалярных произведений векторов, вторые входы которых соединены с выходом блока памяти входных ситуаций, выходы подключены к сответствующим входам блока поиска минимума, выходы которого соединены с упр авляющими входа.мн ключей, входы которых соедикеяы с выходом блока входных € туаций, выходы - с соответствующими входами блока определения центра тяжести векторов, выход которого соединен с входом блока интегрирования, отличающ е е ся тем, что, с целью повышения быстродействия, в него введены дополнительный блок определения скалярных произведений векторов, первый вход которого соединен с выходОМ .блока определения центра тяжести векторов, второй вход соединен
С .выхоао,м блока интегрирования, указатель максимум а, вход которого соединен с выходом дополнительного блока определения скалярных произведений векторов, и блок па.МЯти, вход которого соединен с ВЫХОДОМ блока интегрирования, управляющий вход подключен к выходу указателя максимума, а выход соединен с выходом устройства.
Источники информации,
принятые во внимание при экспертизе:
1.Авторское свидетельство
СССР 267214, кл. G 06 F 15/18, 1968.
2.Авторское свидетельство СССР 368627, кл. G 06 К 9/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нахождения оптимального вектора решения системы линейных неравенств | 1985 |
|
SU1315996A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ ПОРОГОВОГО ЭЛЕМЕНТА | 1973 |
|
SU368627A1 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 1998 |
|
RU2150146C1 |
| Устройство для интегрирования постоянного тока | 1983 |
|
SU1166144A1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КРАЕВ ДЛЯ СИСТЕМЫ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 1991 |
|
RU2020582C1 |
| ВОКОДЕРНАЯ ИНТЕГРАЛЬНАЯ СХЕМА ПРИКЛАДНОЙ ОРИЕНТАЦИИ | 1995 |
|
RU2183034C2 |
| Устройство формирования весовых коэффициентов в условиях нестационарной помеховой обстановки | 1991 |
|
SU1809401A1 |
| Устройство для ассоциативного сжатия информации | 1983 |
|
SU1120390A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1990 |
|
SU1721613A1 |
| Частотный дискриминатор | 1988 |
|
SU1676078A2 |
г
