1
Устройство относится к средствам вычислительной техники и автоматики, может быть использовано для синтеза оптимальных структур пороговых элементов (ПЭ), а также для решения задач распознавания образов.
Известно устройство для автоматического определения оптимальных параметров ПЭ. Настройка его на оптимальную структуру ПЭ, реализуюш;ую заданную функцию, достигается благодаря наличию в схеме блока поиска минимума, который последовательно во времени анализирует взвешенные суммы для каждого набора переменных, на которых определена заданная функция, внутри любого цикла перебора входных ситуаций. Под входной ситуацией здесь понимается совокупность значений физических величин, приводимая в соответствие каждому набору переменных из области определения функции таким образом, что значение г-ой физической величины пропорционально переменной х,. Анализируя внутри каждого цикла перебора входных ситуаций взвешенные суммы для различных наборов, блок минимума управляет ключами, через которые на входы интегрирующих звеньев в течение одного цикла подается только та входная ситуация, для которой взвешенная сумма была минимальна внутри этого цикла. В общем случае в каждый момент существует несколько входных ситуаций, которым соответствует минимальная внутри цикла взвешенная сумма. В известном устройстве из таких входных ситуаций для подачи на вход интеграторов выбирается только одна.
Исполнение известного устройства в быстродействующем варианте получается путем введения в него такого количества сумматоров, которое равно числу наборов из области оиределеиия функции. Это приводит к тому, что
в любой текущий момеит времени на выходах всех сумлгаторов одновременно присутствуют сигналы, пропорциональные взвешенным суммам всех наборов из области определения функции. Вместо последовательного анализа
на минимум в данном варнанте устройства ведется параллельный анализ, выполняемый параллельным блоком минимума. Последний представляет собой устройство с одинаковым числом входов П соответствз-ющпх их выходов
(равным числу наборов из области определения функции). Функционирует он таким образом, что из всех его выходов возбуждается ток, который соответствует входу с минимальным в данный момент сигналом. Если на нескольких входах присутствуют минимальные (одинаковые) сигналы, возбуждается только один (любой) из соответствующих этим входам выход. Следовательно, параллельный блок минимума состоит из двух частей: комбннационного блока минимума п блока выбора
одного вектора. Комбинационный блок минимума имеет количество входов, равное числу сумматоров, и столько же выходов. При этом в данном блоке возбуждаются все выходы, соответствующие тем входам, на которые подаются минимальные (одинаковые) сигналы, каково бы ни было их количество.
Блок выбора одного вектора имеет одно и то же число входов и соответствующих им выходов (равное числу функции), причем входы его подсоединены к выходам комбинационного блока минимума, а выходы управляют ключами, через которые входные ситуации, записанные в блоке памяти, могут подаваться на входы интеграторов. Блок выбора одного вектора довольно сложен, так как его реализация сводится к построению устройства, где необходима блокировка всех возбужденных выходов комбинационного блока минимума, кроме одного (любого).
Цель изобретения - повыщение быстродействия и упрощения конструкции устройства. Достигается она тем, что в предлагаемое устройство введено дополнительно S-1 каналов, состоящих из множительных блоков, подключенных ко входам сумматоров, и блок определения центра тяжести векторов, причем входы блока определения центра тяжести векторов подключены к выходам ключей, а выходы- ко входам интеграторов, выходы которых подключены к соответствующим множительным блокам каждого канала, а выходы сумматоров каждого канала подключены ко входам блока поиска минимума.
Центром тяжести q векторов, имеющих каждый размерность п, называется я-мерный вектор, координаты которого определяются следующим образом:
ч
2W
-
х,
где г 1,2,...,«; / 1,2,...,9; у/ - г-ая координата /-го вектора;
Xi - t-ая координата вектора центра тяжести q векторов.
В предложенном устройстве возможна ситуация, когда открыто одновременно несколько ключей. Но теперь через ключи входные ситуации из блока памяти поступают не на интеграторы, а на блок определения центра тяжести. Назначение нового блока - вычислять для подачи на вход интеграторов набор сигналов, соответствующий вектору центра тяжести нескольких векторов (наборов), взвещенные суммы на которых в данный момент одинаковы и минимальны. В этом случае корректировка текущего вектора структуры происходит в любой момент с учетом совокупности всех худщих ситуаций (всех наборов с минимальными взвешенными суммами), а не одного из многих равноценных векторов. Поэтому траектория движения к оптимальному вектору оказывается более короткой. Кроме того, блок определения центра тяжести нескольких векторов (наборов) проще блока выбора одного вектора (набора). Таким образом, введение блока определения центра тяжести позволяет упростить устройство благодаря упрощению требований к блоку минимума (возможность иметь возбужденными все выходы, соответствующие минимальным сигналам на
входе) и повыщению его быстродействия.
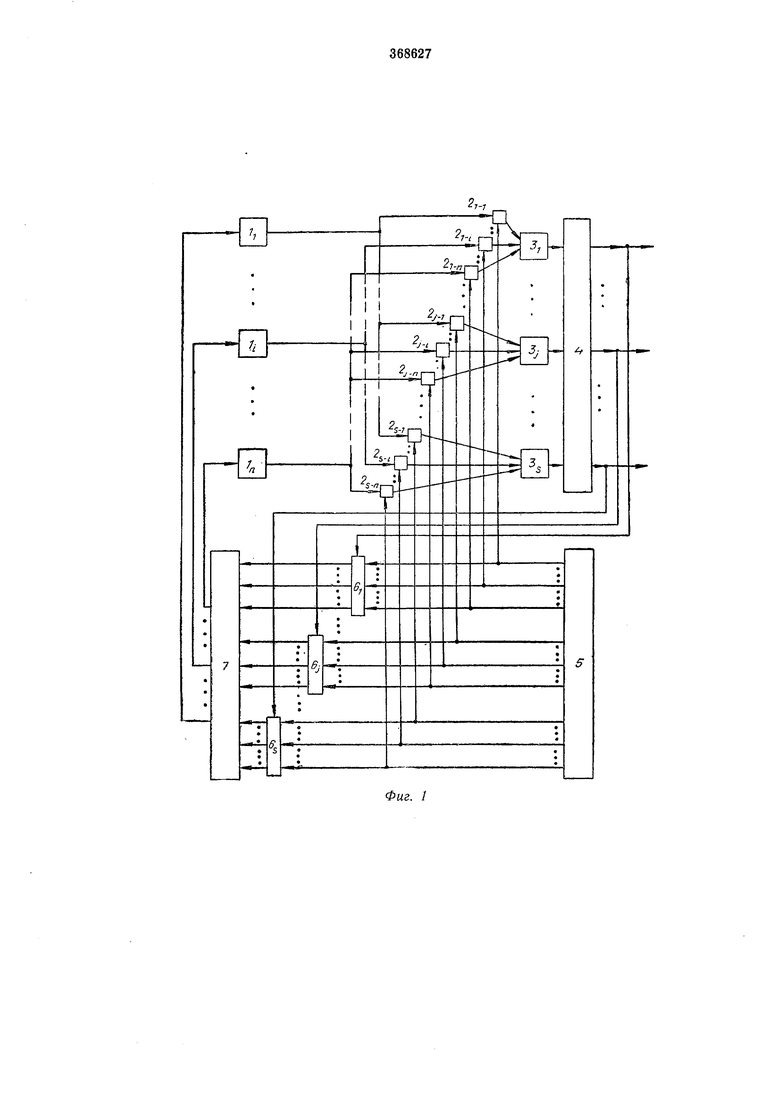
На фиг, 1 изображена блок-схема быстродействующего устройства для нахождения оптимальных параметров ПЭ, реализующего функцию от п-1 переменных, заданную на
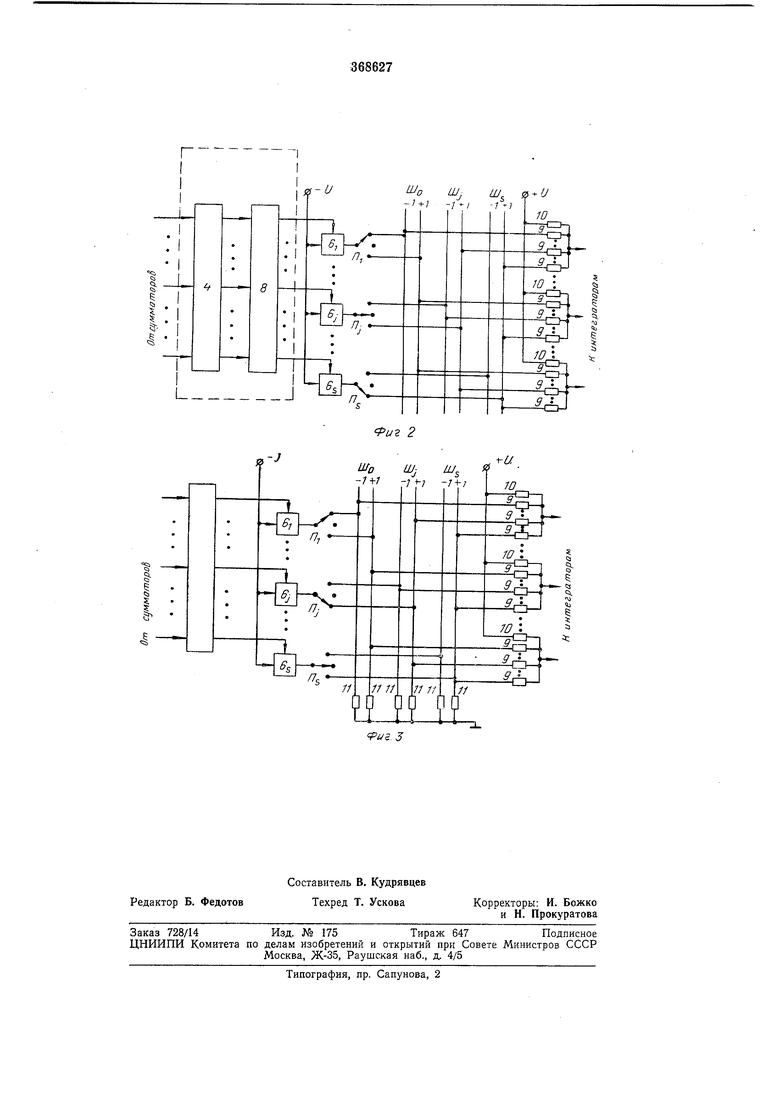
5 наборах; на фиг. 2 - фрагмент принципиальной схемы устройства с использованием блока выбора одного вектора; на фиг. 3 - фрагмент принципиальной схемы устройства с использованием блока определения центра
тяжести.
Устройство содержит п интеграторов /j (, 2,..., п), S-n множительных устройств 2ц, S сумматоров 3j (/ 1, 2,..., 5), блок поиска минимума 4, блок памяти входных ситуаций 5, S ключей 6j (, 2,..., 5) и блок определения центра тяжести 7. В данном случае л-ный интегратор соответствует порогу. Порог Б устройстве рассматривается как частный случай одного из входов ПЭ, вес которого,
подобно весам других входов, изменяется в процессе нахождения оптимальной структуры ПЭ, но входной сигнал, имеющий данный вес, всегда равен единице.
Выход каждого из интеграторов li соединен
со входами множительных устройств 2ц. Вторые входы множительных устройств соединены с п выходами блока памяти 5. Каждый из сумматоров 3j имеет п входов, которые соединены с я множительными устройствами 2цЗдесь индекс / означает, что выход множительного устройства соединен с одним из входов /-ГО сумматора и что второй вход множительного устройства соединен с выходной щиной блока 5, соответствующей /-ому набору.
Индекс i при обозначении множительного устройства показывает, что первый его вход соединен с выходом i-ro интегратора и что соединенная с его вторым входом выходная щина блока 5 соответствует в /-ом наборе переменной под номером i.
Выходы всех сумматоров соединены с 5 входами блока 4.
Каждому входу блока 4 соответствует свой выход. Блок поиска минимума функционирует
таким образом, что из 5 его выходов всегда возбуждены те, которые соответствуют входам с минимальными сигналами. В качестве комбинационного блока поиска минимума 4 может быть использована, например, диодная
схема совпадения на S входов для положительных сигналов (схема «И), общая точка которых подсоединена к инвертирующему усилителю с коэффициентом передачи, равном единице, в сочетании с 5 нуль-органами с двумя выхода ш каждый. Первые входы этих
нуль-органов объединены и соединены с инвертирующим усилителем, а вторые подключены к соответствующим щинам входных сигналов в блоке 4. Все S выходов блока 4 соединены с управляющими входами соответствующих ключей 6j (, 2,..., S), каждый из которых коммутирует одну из входных ситуаций, записанных в блоке памяти 5, на входы блока определения центра тяжести 7. Блок памяти 5 имеет S групп выходов по п щин в каждой группе. По /-ОЙ группе выходных щин через ключ 6j, управляемый /-ым выходом блока 4, на входы блока 7 подается входная ситуация, соответствующая /-ому набору, входящему в область определения заданной функции. В качестве блока памяти входных ситуаций могут быть использованы запоминающие устройства на триггерах, наборные ноля с коммутацией и др.
Входы блока определения центра тяжести 7 соединены через ключи 6j (1, 2,..., S) с выходами блока памяти 5, а выходы его подключены ко входам интеграторов /;. В качестве блока определения центра тяжести векторов 7, выиолняющего суммирование и деление, могут использоваться простые суммирующие цепи на резисторах, питаемые источником постоянного тока. Ключ 6 представляет собой устройство для коммутации по одному управляющему сигналу набора из п входных щин с соответствующим набором из п выходных шин.
В блоке памяти 5 предварительно записызаются все входные ситуации, соответствующие входным наборам, на которых определена заданная функция. После подачи на схему питания возбуждается один или несколько выходов блока минимума 4 в зависимости от начальных условий интегрирования. При этом открывается один или несколько ключей 6j, и на вход блока определения центра тяжести 7 поступает одна или несколько входных ситуаций, записанных в блоке памяти 5. При этом блок 7 формирует набор сигналов, соответствующий вектору (набору) центра тяжести зсех входных векторов (наборов), присутствующих в данный момент на его входах, и подает его на входы интеграторов 1г. В процессе интегрирования меняются выходные сигналы интеграторов, которые представляют собой веса |г порогового элемента, и, как следствие этого, становится иным соотношение выходных сигналов сумматоров 3j, которые оказываются пропорциональными взвешенным суммам на соответствующих наборах в любой момент времени. В соответствии с количеством и местом минимальных сигналов на выходе блока 4 меняются количество и номера его возбужденных выходов и соответствующих им открытых ключей 5,-, что, в свою очередь, вызывает смену набора сигналов, вырабатываемого в блоке определения центра тяжести 7 и подаваемого на входы интеграторов /. Выходные сигналы последних изменяются,до тех пор, пока они не приобретут значений,
пропорциональных весам оптимальной структуры ПЭ, реализующего заданную функцию. С этого момента на входах интеграторов / наборы сигналов меняются таким образом, 5 чтобы поддерживать достигнутое состояние. Так как в данном устройстве набор сигналов, воздействующий на интеграторы, в любой момент вырабатывается с учетом всех худших наборов, траектория движения текущего вектора структуры к оптимальному оказывается короче, чем для случая корректировки текущего вектора структуры по одному КЗ худших наборов. Поэтому время нахождения оптимальных параметров ПЭ в предлагаемом устройстве оказывается меньше, чем в известном.
На фиг. 2 и 3 показаны принципиальные схемы соответствующих друг другу частей устройств - известного (фиг. 2) и предлагаемого (фиг. 3). Не показанные на этих фигурах части устройств друг от друга не отличаются.
На фиг. 2 изображены блок поиска минимума 4, блок выбора одного вектора 8, ключи 6j,
5 коммутирующие наборы на вход интеграторов (последние на схеме не показаны), блок памяти, чью функцию выполняют переключатели HI-Пв, и S пар шин UIj (, 2,..., 5), к которым, образуя п суммирующих цепочек, подсоединены резисторы 9. Последнне соединяются с шинами таким образом, что при подключении к источнику напряжения -U через ключ 6j /-ОЙ шины с индексом «+1 или «-1 (это означает, что в блок памяти занесено
5 значение функции на /-ом наборе, равное +1 или -1) в суммирующих точках всех суммирующих цепей оказывается входная ситуация, соответствующая /-му набору в прямом или обратном коде соответственно. С помощью
0 напряжения -f U через резисторы 10 в суммирующие точки задается постоянное смещение, благодаря чему входные ситуации оказываются представленными в симметричном базисе + 1; -1. Такое схемное рещение выборки
5 из блока памяти входных ситуаций оптимально в том смысле, что каждый из ключей 6} (1 1, 2,..., 5), предназначенный пропускать п-мерную входную ситуацию, оказывается эквивалентным одному релейному контакту.
0 Рассмотрим теперь схему на фиг. 3. Из сравнения ее со схемой на фиг. 2 видно, что в предлагаемом вместо источника напряжения -и стоит источник тока -/, ко всем наборным щинам подсоединены резисторы 11, вторые концы которых связаны с общей шиной (землей), и ключи 6j управляются непосредственно выходами блока -#. Резисторы//уравнивают нагрузку всех 2s наборных шин (до этого наборные шины имели неравномерную
0 нагрузку из-за разного количества подсоединенных к ним одинаковых резисторов 9). Уравненные по нагрузке наборные шины вместе с суммирующими цепочками на резисторах 9, питаемые источником постоянного то5 ка -/, представляют собой в совокупности
блок определения центра тяжести. Если открыт один из ключей 6, то на соответствующей ему наборной шине возникает постоянное напряжение -Uo, одинаковое для всех шин
/- ВЯОХ АЯИНЬОХЭП М KHH3hOirr IDOU ХМ ЭЙЬЛЮ а
по одной. Но так как блок поиска минимума 4 может открыть одновременно q ключей 6j (1(), к источнику тока -/ могут одновременно подключиться q наборных шин. При этом напряжение на каждой из подключенных шин в q раз меньше, чем -С/о.
В результате в каждой суммирующей цепочке происходит поразрядное суммирование токов всех возбужденных шип с одновременным делением этой суммы на количество возбужденных шин.
Правомочность использования для задапия базиса (+1, -1) вместо (0,2) постоянного смещения , не зависящего от количества возбужденных шин, доказывается следующими простыми преобразованиями.
Если г-ая координата вектора центра тяжести векторов, У{ , +1 -г-ая координата /-ГО вектора в симметричном базисе, 2/ 0 2 -f-ая координата /-го вектора в несимметричном базисе, который задается реальной схемой (ключ 6j либо подключает шину к источнику тока -/, либо отключает
ее), то и следовательно,
i(z{-i) iz{
V } l
-
-1,
Л1 r
т. е.
для определения в симметричном базисе t-ой координаты вектора центра тяжести q векторов достаточно из значения этой координаты, вычисленной для несимметричного базиса, вычесть постоянную, не зависящую от д, величину, равную единице, что и осуществляется в устройстве заданием постоянного смещения
+ и.
Предмет изобретения
Устройство для автоматического определения оптимальных параметров порогового элемента, содержащее интеграторы, подключенные через множительные блоки ко входам сумматора, выход которого через блок поиска
минимума подключен к управляющим входам ключей, соединенных с выходами блока памяти входных ситуаций, отличающееся тем, что, с целью повыщения быстродействия, в него введено (S-1) каналов, состоящих из
множительных блоков, подключенных ко вхо1 аы сумматоров, и блок определения центра тяжести векторов, входы которого подключены к выходам ключей, а выходы - ко входам интеграторов, выходы которых подключены к
соответствующим множительным блокам каждого канала, связанным своими вторыми входами с соответствующими выходами блока памяти входных ситуаций, а выходы сумматоров каждого канала подключены ко входам
блока поиска минимума.
i-i I-I 
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ПОРОГОВЫЙ ЭЛЕМЕНТ | 1970 |
|
SU267214A1 |
| Измеритель модуля пространственного вектора | 1980 |
|
SU1018126A1 |
| УСТРОЙСТВО ДЛЯ СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ИНФОРМАЦИИ | 1972 |
|
SU357565A1 |
| Устройство для вычисления оптимальной структуры пороговых элементов | 1976 |
|
SU635488A1 |
| Устройство для измерения активной мощности | 1979 |
|
SU789845A1 |
| Устройство для нахождения оптимального вектора решения системы линейных неравенств | 1985 |
|
SU1315996A1 |
| Адантивный вычислитель | 1978 |
|
SU697998A1 |
| Устройство для вычисления коэффициентов разложения функции в ряд | 1980 |
|
SU881761A1 |
| Взаимно-базисный корректор | 1986 |
|
SU1403382A1 |
| ЦЕНТРАЛЬНЫЙ ПРОЦЕССОР МУЛЬТИПРОГРАММНОЙ МУЛЬТИПРОЦЕССОРНОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ | 1971 |
|
SU309363A1 |
I
1
MJMl
