многоуровневой иерархической системы деления сложного рисунка интегральной схемы с регулярной структурой на составные части. На нижнем уровне находятся элементарные (базовые) фигуры, отдельные фигуры объединяются в элемент, а группы элементов и фигур - во фрагмент. Для описа,н,ия тополопии интегралнных cxe.vt любой сложности достаточно четырехуровневой системы. Но для достижения практической пользы от деления рисунка на части требуется много}ровневая система преобразований, поскольку сложный фрагмент может быть образован разворотом некоторого более простого фрагмента, который набирается преобразованием элементов.
Применительно к микрофотонаборныгл установкам «ли коорди:натографа. эта задача решается программным иутем с использованием универсальных ЭВМ. При создании же специализированных машин для уиравления электронно-лучевыми установками представляется целесообразным включение в их состав достаточно простых технических средств, обеспечивающих функции многократных преобразований составных рисунков. ПрИлМеняя при этом весь богатый арсенал идей и средств, используемых в современных алгоритмических языках, можно сделать входной язык машины ориентированным, обеспечив таким образом удобство ее математической эксплуатации.
Исходя из четырехуровневой системы деления рисунка на топологические единицы, можно считать достаточным введение трех уровней преобразований, два из которых могут использоваться для преобразования фрагментов, а один - элементов.
Известная машина обеспечивает выполнение преобразований топологических единиц одного уровня, например разворот фрагмента, но не допускает разворота подчиненных топологических единиц и наоборот. Это приводит к снижению ее эффективности при воспроизведении рисунков больших интегральных схем с регулярной структурой.
Цель изобретения - повышение эффективности машины путем более экономичного использования объема памяти и уменьшения трудоемкости процесса программирования.
Поставленная цель достигается тем, что в машину введен блок анализа поворотов изображений, подключенный первым входом к кодовой шине, вторым входом - к соответствующему выходу блока управления, а выходом - к входу блока поворота изображеамй.
Блок анализа поворотов изображений содержит три регистра, дешифратор и два кодирующих устройства, первые входы которых соединены соответственно с выходами первого и второго регистров, второй вход
первого кодирующего устройства подключен к выходу третьего регистра, а выход соединен с вторым входом второго кодируюшего устройства,- выход которого дешифратор соединен с выходом . блока, входы упомянутых, регистров соединен. с первым входОМ блока, -правляющие входы подключены к второму входу блока.
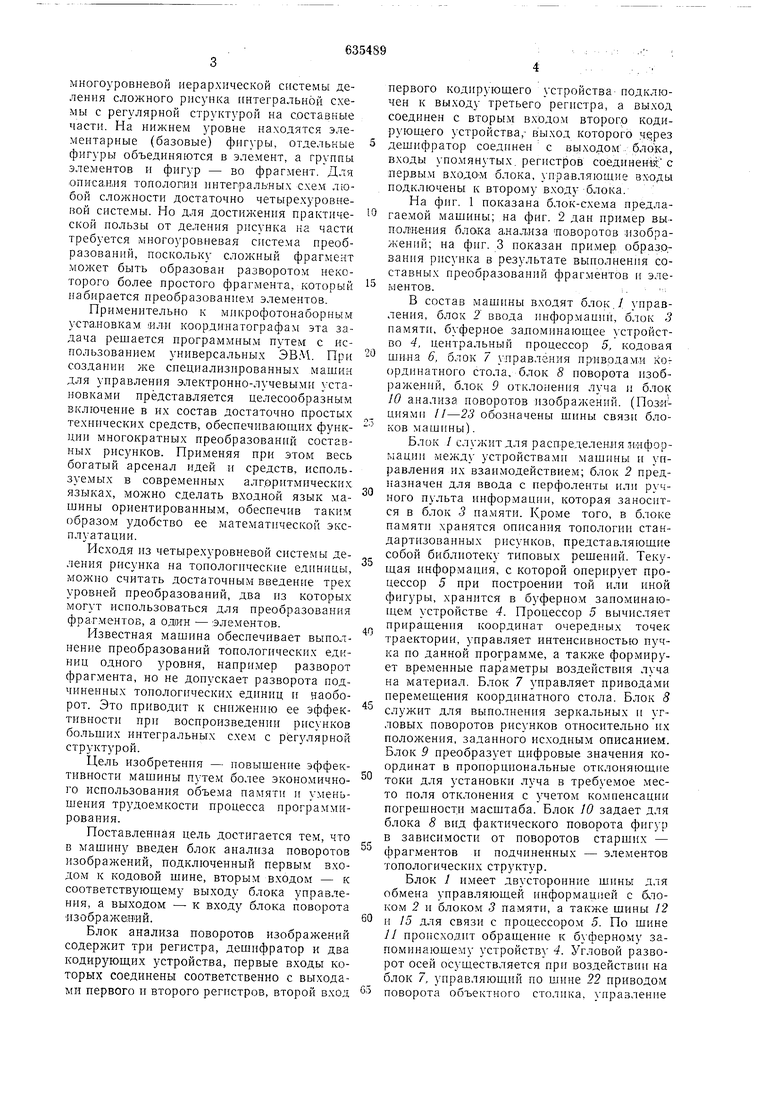
На фиг. 1 показана блок-схема предлагаемой машины; на фиг. 2 дан пример выиолиения блока анализа поворотов -изображений; на фиг. 3 показан ирихмер образО;вания рисунка в результате выполнения составных преобразований фрагментов и элементов.:.
В состав машины входят блок,/ уиравления, блок 2 ввода инфор.маипи, блок 3 памяти, буферное запоминающее устройство 4, центральный процессор 5, кодовая шина 6, блок 7 улравления приводами координатного стола, блок 8 поворота изображений, блок 9 отклонения луча и блок
10анализа поворотов изображений. (Позициями //-23 обозначены шины связи блоков машины).
Блок / служит для распределения информации между устройствами машины и управления их взаимодействием; блок 2 предназначен для ввода с перфоленты или ручного пульта информации, которая заносится в блок 3 памяти. Кроме того, в блоке памяти хранятся описания топологии стандартизованных рисунков, представляющие собой библиотеку типовых решений. Текущая информация, с которой оперирует процессор 5 при построении той или иной фигуры, хранится в буферном запоминающем устройстве 4. Процессор 5 вычисляет приращения координат очередных точек траектории, управляет интенсивностью пучка по данной программе, а также формирует временные параметры воздействия луча на материал. Блок 7 управляет приводами перемещения координатного стола. Блок 5 служит для выполнения зеркальных и угловых поворотов рисунков относительно их положения, заданного исходным описанием. Блок 9 преобразует цифровые значения координат в пропорциональные отклоняющие токи для установки луча в требуемое место поля отклонения с учетом компенсации погрешности масштаба. Блок 10 задает для блока 8 вид фактического поворота фигур в зависимости от поворотов старших - фраг.ментов и подчиненных - элементов топологических структур.
Блок 1 имеет двусторонние шины для обмена управляющей информацией с блоком 2 и блоко.м 3 памяти, а также шины 12 и 15 для связи с процессором 5. По шине
11происходит обращение к б -ферному запоминаюшему устройству 4. Угловой разворот осей осуществляется при воздействии на блок 7, управляющий по шине 22 приводом поворота объектного столика, хпразление
же координатными приводами про.ис.ходнт по шинам 21 при воздействии процессора «а блок 7 с помощью двусторонних шин связи. По.шиие 23 в блок 7 поступают сиг«алы от датчиков перемещения координатного стола.
По шине 14 блок 1 управляет заиесением в блок 10 анализа поворотов изображений информации о повороте составных топологических единиц. Признак фактического поворота с выхода блока 10 по шине 13 поступает в блок 8, настраивая его на преобразование координат фигур, вычисленных процессором, в соответствии с видом поворота. Цифровые значения координат с выхода блока 8 поступают в блок 9 отклонения, вырабатывающий на шинах 17 соответствующие отклоняющие токи. По шинам 18 и 19 процессор управляет интенсивностью пучка (током и энергией), а по шине 20 - его бланкированием. Обмен информацией между устройствами машины осуществляется по кодовой шине 6.
На фиг. 2 показаны регистры 24-26 для
6
хранения признаков поворотов составных рисунков, кодирующие устройства 27, 28 и дешифратор 29. По шине 14 осуществляется запись кодов признаков поворотов в соответствующие регистры.
Возможно восемь положений фигуры на плосхостп: параллельное исходному (поворот на О); поверпутое на 90°; повернутое ка 180; повернутое на 270°; зеркально-симметричное относительно оси абсцисс (Зерк. X): зеркально-симметричное относительно оси ординат (Зерк. Y); зеркально-симметричное относительно оси абсцисс и повернутое на 90° (yY+90°); зеркально-симметрпчное относительно оси ординат и повернутое на 90 (У-|-90°).
Все остальные сочетания поворотов сводятся к этим восьми.
При выполнении составных поворотов, например при повороте элемента и повороте фрагмента, содержащего этот элемент, вид фактического поворота фигур может отличаться от заданного исходным описа1-1 гем.
Таблица 1



| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая машина для управления процессами электронно-лучевой микрообработки | 1977 |
|
SU702378A1 |
| Устройство подготовки данных для машин управления процессами электронно-лучевой микрообработки | 1983 |
|
SU1154257A1 |
| Цифровая машина для управления процессами электринно-лучевой микрообработки | 1975 |
|
SU600562A1 |
| Цифровая машина для управления процессами электронноголучевой микрообработки | 1974 |
|
SU511594A1 |
| Цифровая машина для управления процессами электроннолучевой микрообработки | 1974 |
|
SU477417A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Пульт учащегося для устройства обучения языкам | 1985 |
|
SU1354235A1 |
| Устройство для распознавания треков частиц | 1982 |
|
SU1059586A2 |
| СПОСОБ ТРАНСЛЯЦИОННОГО УСЛОЖНЕНИЯ НЕЛИНЕЙНЫХ РЕКУРРЕНТНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ В ВИДЕ КОДОВ КВАДРАТИЧНЫХ ВЫЧЕТОВ, СУЩЕСТВУЮЩИХ В ПРОСТЫХ ПОЛЯХ ГАЛУА GF(p), И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2669506C1 |
| Устройство для распознавания трековчАСТиц | 1979 |
|
SU845165A1 |

В табл. 1 приведены. результирующие повороты фигур ири.выиол.нении составных поворотов.
Па ;фнг. 4 иок.аза.иы фрагменты.50-32, причем фрагмент 30 набирается в-резульг тате последовательного выполнения иоворотовэлемента 5, принятого в качестве исходног.о. Элемент 34 образуется в-результате поворота на 180° исходного элемента, элемент 35 - зеркально-симметричного поворота относительно оси. У, элемент 36 - зеркально-симметричного поворота относительно оси X. Фрагмент 3J иолучается зеркально-симметричным .поворотом относительно оси У фрагмента 30, а фрагмент 32 - параллельным иереносом составного фрагмента 30 и 3L
Программа работы машины вводится с помощью блока 2 в блок памяти под действием сигна.юв, формируемых блоком / управления.
В табл. 2 приведен пример программы воспроизведения сложного рисуика, образованного при выполпенпп составных иреобразований. В описательной части программы (табл. 2) содержатся данные о взаимном размещении составных частей полного рнсунка или фрагмента, для чего здесь ириводятся координаты точек привязки, в которые должны быть помещены начала -тех или иных элементов рисунка. Кроме того, для всех подобных элементов и фраг.ментов указывается вид поворота относительно перзообразлых фигур, оиисание которых приводится полностью в виде координат всех верщин контура. При этом описание первообразных фигур может быть осуществлено как в собственной, так и в реальной системе коордииат. Это позволяет использовать фигуры из библиотечного набора типовых решений, содержащегося в блоке 3. Так для рисунка, показанного на фиг. 4, описывается 8 верщин элемента 33, начиная с точки С. Направление обхода контура безразлично. Набираемый фрагмент 30 условно считается фрагментом нулевого уровня («ОФ), координаты точки привязки которого совпадают с координатами точки GI первообразного элемента 33. Для элементов 34, 35 и 36 в порядке их воспроизведения указываются координаты точек Cz, Сз и 4, эквивалентных сочек Сь Для каждого из фрагментов первого уровня («1Ф), являющихся Огображение-м фрагмента нулевого уровня, также указываются координаты точки привязки и вид поворота (на фиг. 4 - точка Сз фрагмента 31).
8 Т а б л I ц а 2 Аналогично описывается и составной фрагмент J2 («2Ф). Описательная часть программы помещается в памяти блока 3, занимая ячейки с условными адресами АО, Ль .. ., АП, . ., An+k, - ., An. I- Управляющая же часть программы задает алгоритм переадресации и, следовательно, иоследовательность восироизведения данного рисунка структуры. Так, команда Выполнить (До : Л/г)(A,,+ i) означает, что должна быть воспроизведена часть рисунка, описание которой помещено в ячейках с адресами от AQ до АП, после чего осуществлен переход к ячейке Ап + 1 и выполнена следующая команда. Управляюихая часть программы может быть занесена в память или использована непосредственно с программоносителя. При выборке информации из блока памяти в буферное запоминающее устройство 4 под воздействием сигналов на щине // заносится описание первообразного элемента, который опознается по отсутствию идантиф.и-кзтара поворота. Коордкнаты опорной точки, в качестве которой автоматически выбирается первая точка первообразного элемента, заносятся в блок 8; сюда же заносятся координаты точки привязки воспроизводимого элемента или фрагмента. В блок W под действием сигналов на щине 14 заносятся признаки поворотов, причем идентификатор элемента («Э) разрешает запись кода в iperHcrp 24, идентификатор фрагмента («1Ф) - в регистр 25, а индентификатор составного фрагмента («2Ф) - в регистр 26.
Кодирующие устройства 27, 28, выполненные, например, в виде матриц, преобразуют трехразрядные коды признаков поворота в трехразрядные же коды фактических поворотов подобных фигур в соответствии с табл. 1.Двухступенчатая обработка информации позволяет упростить структуру кодирующих устройств, поскольку в каждом из «их осуществляется двухкоордииатная выборка. Кодирующие устройства могут быть выполнены на базе диодно-матрпчных интегральных схем. С выхода дешифратора 29 признак поворота по шине 13 поступает на вход блока 8, в соответствии с чем выбирается то или иное уравнение преобразования координат для осуществления необходимого поворота фигуры.
Центральный процессор 5 выполняет вычисление координат всех внутренних точек первообразного элемента или базовой фигуры, заданных исходным описанием, и передает эти значения на вход блока 8, который преобразует их в соответствии с признаком вида поворота с учетом координат точек привязки.
С выхода блока 8 цифровые значения координат поступают на вход блока 9 отклонения, который преобразует их в аналоговую форму.
Координатные токи, пропорциональные значениям координат воспроизводимых точек фигур, по шине 17 поступают в отклоняющую систему электронно-лучевой установки, устанавливая луч в требуемое место подложки. После этого иа miniHe 20 возбуждаются бланкирующие сигналы заданной длительности, модулирующие ток луча. Таким образом,топологическая структура, заданная входным описанием, переносится к
1 зображение в электронно-чувствительном слое.
Введение в структуру известной машиьЬ блока анализа поворотов позволяет значительно сократить количество вводимой информац1 й особенно в случае интегральных схем с регулярной структурой - схем памяти, сумматоров, регистров и других однородных структур. При этом в зависимости от типа схемы и опыта конструкторапроектировщика топологии количество вводимой информации может быть сокращено до 100 и более раз.
Формула изобретения
2
27
I ЛП
25
29
28
/j
2В
75
