1
Изобретение относится к области вычислительной техники и может быть использовано для автоматизированного управления процессами производства компонентов интегральных схем на основе элионной технологии.
Известны цифровые машины для управления процессами электроннолучевой микрообработки материалов, содержапдие операционное устройство, включающее в себя блок управления отклонением луча и блоки формирования временных и энергетических параметров обработки; блок управления координатным столом; блок совмещения координатных осей; блок отклонения; буферное запоминающее устройство, представляющее собой память, распределенную по блокам мащины, запоминающее устройство на ферритах; блок распределения информации и блок ввода программ с перфоленты.
Блок совмещения координатных осей компенсирует погрешности установки начала координат рабочей поверхности по отношению к началу координат отклоняющей системы, а также осуществляет линейные смещения изображений в пределах одной области обработки на заданное программой расстояние.
Однако кроме этого в интегральной микроэлектронике типичными являются случаи, когда фрагменты топологии образуются новоро. том на угол, кратный 90°, или зеркальным
преобразованием некоторого первоначального рисунка. Отсутствие возможности автоматического осуществления указанных преобразований изображений является недостатком этой машины и приводит к снижению эффективности ее в целом из-за увеличения времени программирования, увеличения времени непроизводительного ручного труда, связанного с набивкой перфолент, к перегрузке и уменьщению информационной емкости памяти машины.
Целью изобретения является повышение эффективности работы машины при воспроизведении рисунков сложных интенгральных схем.
Сущность изобретения заключается в том, что в машину введен блок, осуществляющий поворот и зеркальное преобразование изображений, включенный между блоком совмещения осей координат и блоком отклонения луча.
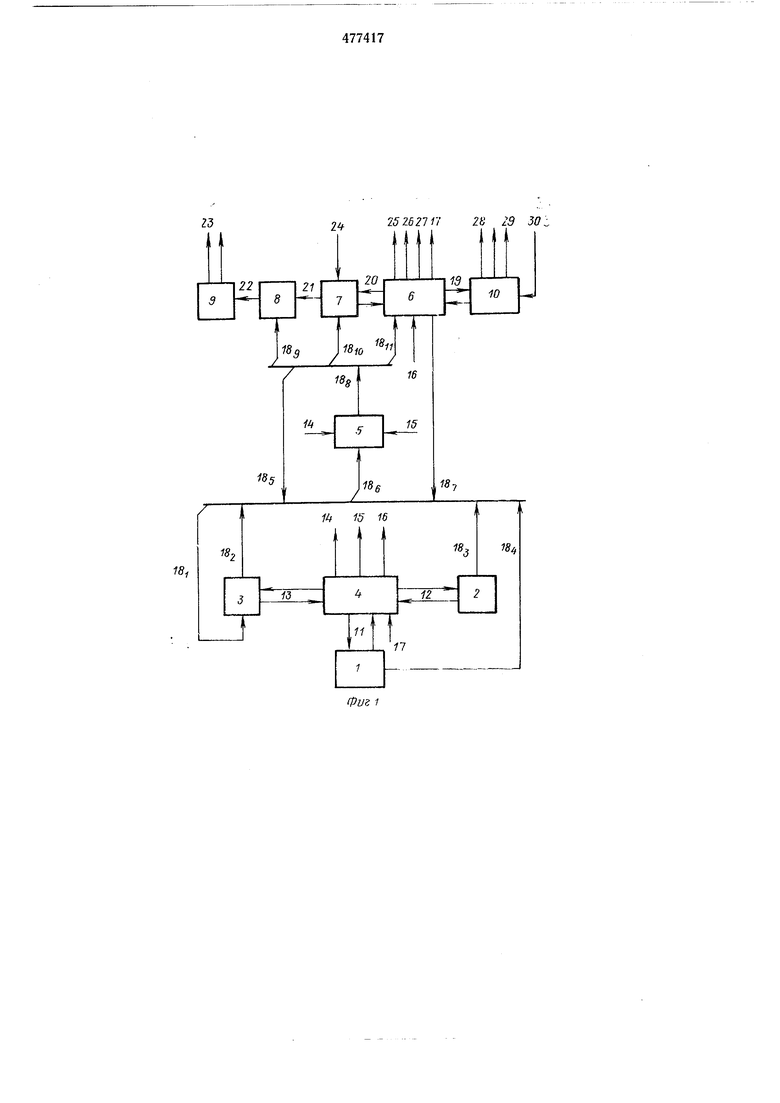
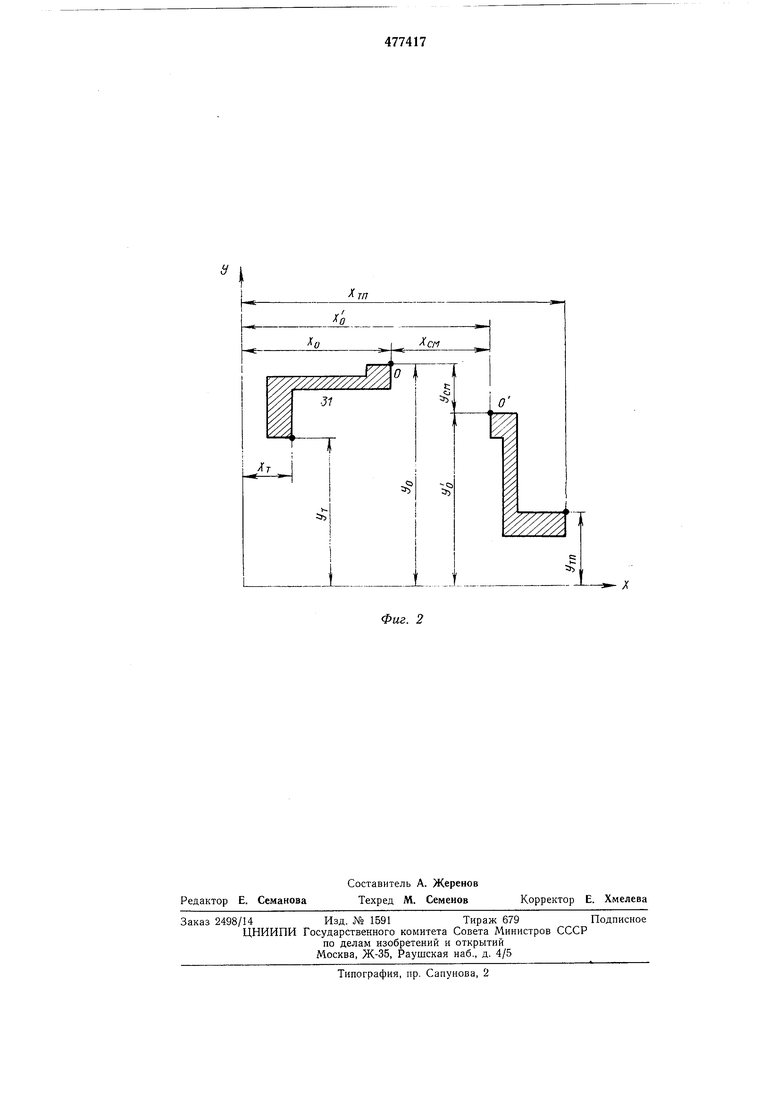
На фиг. 1 представлена блок-схема предлагаемой машины; на фиг. 2 - пример поворота па 90° фрагмента топологии интегральной схемы.
Машина состоит из устройства управления 1, служащего для ввода программ и управления блоками машины; блока трансмиттера 2, предназначенного для ввода программ с перфоленты; запоминающего устройства 3, предназначенного для хранения программ, и блока управления 4, предпазначеиного для
распределения вводимой информации между блоками, а также унравления взаимодействием |блоков машины.
Кроме того, в состав машины входит буферное запоминающее устройство 5, предназначенное для хранения текущей информации, и блок 6 онераций, вычисляюший приращения координат очередных точек траектории, а также формирующий временные параметры воздействия луча на материал в соответствии с заданным законом изменения огибающей серии имнульсов включения и выключения луча и энергетические режимы обработки. Блок 7 совмещения осей координат предназначен для линейного смещения изображений с целью компенсации погрешности установки начала координат или с целью сдвига рисунка в пределах области обработки на заданное по программе число щагов. Блок 8 угловых преобразований изображений предназначен для зеркального отображения заданного но программе рисунка или поворота его на угол,
кратный -. Блок 9 отклонения преобразует
,
цифровые значения координат в регулирующее воздействие для установки луча в заданную точку рабочей поверхности. Блок 10 управления координатным столом предназначен для смещения области обработки на заданное расстояние.
Блок управления 4 имеет двусторонние связи для обмена управляющей информацией с устройством управления 1 по шинам ll, блоком трансмиттера 2 - по шинам 12, запоминающим устройством 3 - по шинам 13. Для обращения к буферному запоминающему устройству 5 блок управления 4 связан с ним шиной 14 сигналов «ЧТЕНИЕ и щиной 15 сигналов «ЗАПИСЬ. Обмен управляющей ийформацией .между блоком управления 4 и блоком операций осуществляется по шинам 16 и 17. Обмен числовой информацией между блоками машины происходит по магистральной кодовой шине 18 -18ii. Для управления перемещением координатного стола блок 6 имеет двусторонние связи по шинам 19 с блоком 10, а для управления перемещением электронного луча - по шинам 20 с блоком 7. С выхода блока 7 коды текущих значений координат по щине 21 поступают в блок 8, с выхода которого они после преобразований, связанных с зеркальным отражением или поворотом, по шине 22 передаются в блок 9 отклонения.
Кроме того, предлагаемая машина содержит щины 23 регулирующих воздействий, к которым подключается отклоняющая система электронно-лучевой установки; шину 24 подключения блока 7 к датчикам сигналов от маркерных знаков; шины 25 бланкирующих сигналов, модулирующих ток луча; шину 26 управления ускоряющим напряжением; шину 27 управления значением тока луча; шины 28 приводов координатного стола и шину 29
управления приводом поворота стола. По шине 30 в блок 10 поступают сигналы от датчиков перемещения стола.
Программа работы, состоящая из отдельных команд (кодов кадров), вводится в запоминающее устройство 3 с устройства управления 1 или нерфоленты. Каждая команда содержит в себе информацию о траектории луча, об энергетических и временных режимах обработки, данные о перемещении координатного стола, а также сведения о линейном, зеркальном или угловом преобразовании исходного рисунка топологии.
Блок 6 операций согласно заданной программе вырабатывает управляющие сигналы, которые задают временные и энергетические параметры луча, а также воздействуют на отклоняющую систему электронно-лучевой установки. При этом на подложке, установленной в вакуумной камере на координатном столе, в пределах области отклонения отрабатываются заданные фигуры. После окончания обработки в пределах этой области блок 6 вырабатывает управляющие сигналы на перемещение координатного стола, которые через блок 10 воздействуют на электроприводы стола.
Контроль перемещений координатного стола осуществляется с помощью датчиков перемещений, выходные сигналы которых поступают в блок 10 по шине 30.
Повторная обработка подложки после перемещения координатного стола осуществляется с предварительной коррекцией положения начала координат области обработки по отношению к началу координат отклоняющей системы. Погрешность установки осей определяется в результате отыскания лучом маркерных знаков, нанесенных при первичной обработке подложки.
Вычисление погрешности осуществляется совместной работой блоков 6 и 7 при поступлении на вход последнего сигналов от маркерных знаков по шине 24. Рассчитанное значение погрешности по шине 20 передается в блок 7 и в дальнейшем реализуется нри повторной обработке подложки.
Программа повторной обработки может содержать команды как на воспроизведение нредыдущего рисунка в заданных значениях координат, так и рисунка, образованного поворотом или зеркальным преобразованием исходного.
Для воспроизведения рисунка с этими преобразованиями в машину вводится команда, в которой указывается признак модификации ее (зеркальное отображение относительно
оси X или У, поворот изображения на угол- .,
т:, - я, а также величина смещения опорной
точки, в качестве которой автоматически выбирается начальная точка первого воспроизводимого рисунка. В дальнейшем эта команда
используется при отработке всех последующих геометрических рисунков, составляющих задаииый фрагмент топологии интегральной схемы.
На фиг. 2 показан фрагмент интегральной схе.мы, который образован поворотом на 90° фрагмента 31, заданного программой первичной обработки, прн этом приняты следующие обозначения: о - опорная точка, о - центр вращения изображения, Хо и YO - координаты опорной точки, XT- и УТ - текущие координаты исходного рисунка, JCM и УСМ - величины смещения опорной точки, Хо к УО - координаты центра вращения и тп и УТП - текущие координаты преобразованного рисунка.
Приращения координат траектории, рассчитанные в блоке 6, по щине 20 ноступают в блок 7, который осуществляет коррекцию значения координат на вычисленную ранее величину погрещности, а также выполняет линейное преобразование координат в зависимости от кода на щине 18io. Коды текущих значений координат и УТ с выхода блока 7 по шине 21 поступают в блок 8 углового преобразования изображений, с другой стороны, по щине ISg в этот блок заносятся коды значений координат опорной точки о (Ко и УО) и центра вращения о (Хо и Уо). Блок 8 выполняет преобразования, в результате которых на выходе его образуются текущие значения координат рисунка ( и УТП), повернутого относительно исходного в соответствии с заданной модификацией команды поворота.
При вращении изображения блок 8 осуществляет следующие преобразования координат: X,(), () при повороте на угол 90°; Хт:т1 Хо-{-{Хо-Xi), УТП () при повороте на угол
180°; лтп о-{Уо-УТ), УТП У о-Ь (ло-XT)
при повороте на угол 270°.
При зеркальном преобразовании изображения блок 8 осуществляет следующие вычисления:
XTTI X o-f- (АО-Xf) , Ут, Уо-(Уо-Ут)
при преобразовании относительно оси X; Xf,,X о-(),
(Уо-Ут)
при преобразовании относительно оси У.
Текупдие значения координат, выраженные в цифровом виде, по щине 22 передаются в блок 9 отклонения, который преобразует их в регулирующие воздействия, поступающие по щинам 23, в отклоняющую систему электронно-лучевой установки, перемещая луч в очередную точку рабочей поверхности. После этого блок 6 формирует временные и энергетические параметры воздействия луча на материал, вырабатывая на щинах 25, 26 и 27 сигналы управления модулятором и устройством питания электроннолучевой установки. После отработки заданного программой временного интервала мащиной выполняется расчет очередной точки траектории так, как было описано выше. Такие чередующиеся циклы расчета координат и обработки продолжаются до окончания воспроизведения преобразованного фрагмента топологии интегральной схемы.
Предмет изобретения
Цифровая мащина для управления процессами электронно-лучевой микрообработки, содержащая устройство управления, блок трансмиттера, запоминающее устройство, блок управления, буферное запоминающее устройство, блок операций, подключенные к кодовой щине и к щинам управляющих сигналов, блок управления координатным столом, соединенный двухсторонними связями с блоком операций и с соответствующими входами и выходами мащины, блок совмещения осей координат, подключенный к кодовой щине, к соответствующему входу мащины и соединенный двусторонними связями с блоком операций, выходы которого подключены к соответствующим выходам мащины, блок отклонения, выходы которого соединены с соответствующими выходами мащины, о т л и ч а ЮЩ а я с я тем, что, с целью повышения эффективности работы при воспроизведении рисунков сложных интегральных схем, в нее введен блок угловых преобразований изображений, подключенный к кодовой шине и к выходу блока совмещения осей координат, выход блока угловых преобразований изображений соединен со входом блока отклонения.
23
2 252621Г1 28 19 50 i.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая машина для управления процессами электринно-лучевой микрообработки | 1975 |
|
SU600562A1 |
| Цифровая машина для управления процессами электронноголучевой микрообработки | 1974 |
|
SU511594A1 |
| Цифровая машина для управления процессами электроннолучевой микрообработки | 1976 |
|
SU635489A2 |
| Цифровая машина для управления процессами электронно-лучевой микрообработки | 1974 |
|
SU608163A1 |
| Цифровая машина для управления процессами электронно-лучевой микрообработки | 1977 |
|
SU702378A1 |
| ГЕНЕРАТОР ВЕКТОРОВI | 1973 |
|
SU406194A1 |
| Цифровая машина для управления про-цЕССАМи элЕКТРОННОлучЕВОй МиКРООбРА-бОТКи | 1978 |
|
SU840916A2 |
| Устройство подготовки данных для машин управления процессами электронно-лучевой микрообработки | 1983 |
|
SU1154257A1 |
| Устройство для регистрации дефектов и контроля фотошаблонов | 1972 |
|
SU481766A1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ НА ЭКРАНЕ ЭЛЕКТРОННОЛУЧЕВОЙ ТРУБКИ | 1973 |
|
SU374590A1 |
22
21
18
10
18
1
15
«5
18,
18,
У
