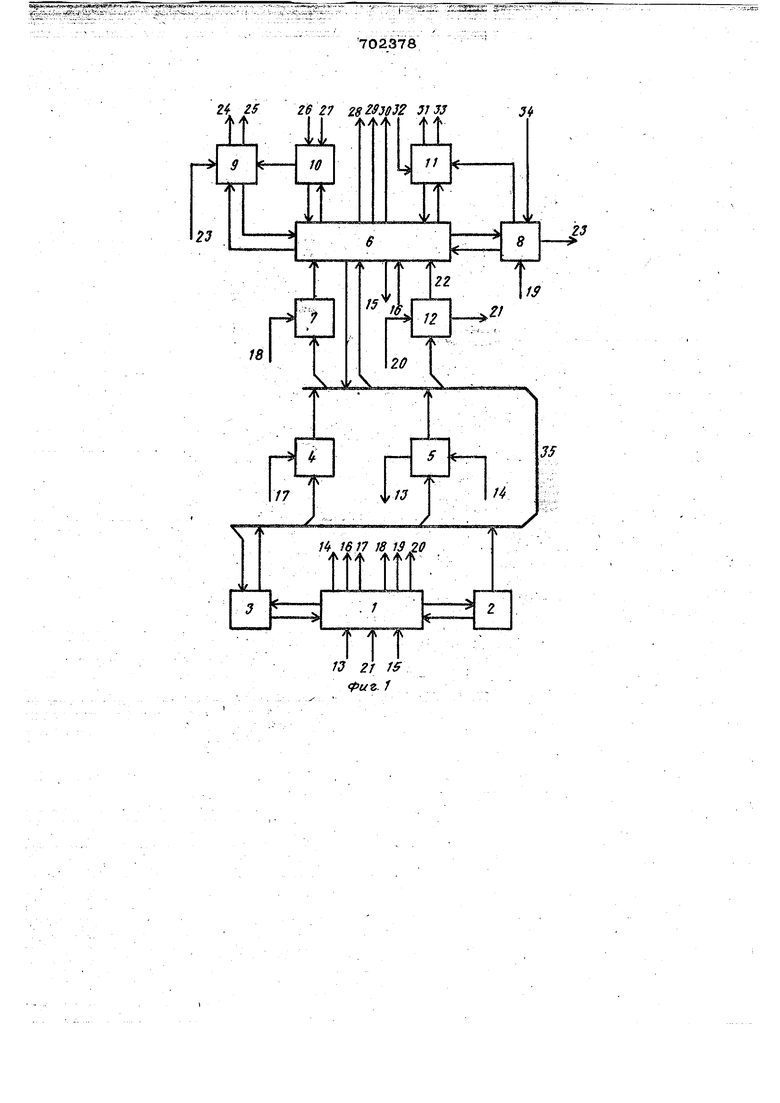
Изобретение касается вычислительной техники и может быть использовано для автоматизированного управления процессами производства защитных масок и фотошаблонов и/ш непосредственно компо нентов интегральных схем на основе эли онной технологии. Известна цифровая машина для управ ления nponecfcaMH электроннолучевой микрообработки, содержашая устройство управления, блок трансмиттера, запоминающее устройство, блок управления, буферное запоминакпдее устройств Влок выполнения операций, блок управления координатным столом, блок совмещения осей координат, блок отклонения, блок угловых преобразований изображений fl. С помощью такой машины осуществляется управление перемещением и моду ляцией электронного пучка, перемещением координатного стола и точпым совмещением отдельнь1Х участков подложки по отношению к электронному пучку. В результате на подложке формируется изб б|эажение микроструктуры интегральной схемы, В этой машине, благодаря включению Б ее структуру средств, выполняющих преобразование и интерпретацию геометрической информации реализуетх;я язык высокого уровня, позволяющий значительно упростить процесс Iпрограммирования и сократить количество вводимой информации особенно для схем с периодической регулярной структурой. Наиболее близкой по технической сущности к; предложенной является машина, содержащая блоки ввода информа Й1И, памяти, интерпретации, анализа поворотов, буферное запоминающее устройство и процессор; соединенные кодовой шиной и шинами управляющих сит налов, блок коррекции, соединенный двухсторонними связями с процессором и подключенный управляющим и информационным входами соответственно к выходу блока управления и к первому информационному входу машины, выходы блока коррекции подключены соответственно к первым входам, блока отклонения и блока управления приводами координатного стола, второй вход Которого соединен со вторым информационым входом машины выходы блока травления приводами координатного стола подключены cooTBeiw ственйо к первому и второму утфавля- 1ащим выходам машины, блок управпе)зия приводами координатного ртода соединен двухсторонними связями с иро цессором, выходы которого подключены cooTBeit BeHHo к третьему, четвертому и пятому управляющим выходам машины блок контроля токов отклонения и блок отклонения соединены .двухсторонними связями с процессором, входы блока контроля токов .отклонения соединены соответственно с третьим в четвертым информационными входами машнЕпьг, выхо подключен ко второму входу блока oiv. КЛонения, выходы которого подключены соответственно к шестому и седьмому управляющим выходам машины, выход блока анализа поворотов соединен с соответствующим входом процессора 2. С помощью такой машины осуществляется управление электроннолучевой установкой при изготовлении масок или непосредственно компонентов интегральных схем. Для уменьшения объема вводимых данных, упрощения процесса программирования, сокращения затрат на программирование, и, как следствие, повышения эффективности машины в ней предусмотрен редким многоуровневых преобразований топологичейких единиц. Это йозволяет формировать регулярные структуры из некоторых базовых рисунков, причем, полностью описываются лишь базовые 4)агменты, а для образования подобных им в оптгсании указывается по одной точке привязки для каждого повторяющегося рисунка и вид преобразования базовых топологических единиц. Но для ряда сдучаев даже такое задание топологии оказывается недостаточно, эффективным., В настоящее время получают распространение матричные структуры (БИС). К ним относятся все БИС памяти постоянной, оперативной и другие схе- кш ни jBtx основе, явпякяциеся мат ичными. К матричным структурам приводит ячеечный метод проектирования БИС, по : ающий в настоящее время широкое, п менение в связи с развитием автоматизации проектирования. Для матричных БИС характерно наличие инвариантов в их структуре и, следовательно, в описании в большей степени, чем это имеет место в других структурах . Поэтому важно обеспечить такую форму задания матричной топологии кото)ая исключала бы избыточность описания. С точки зрения описания существенной особенностью матричных структур является то, что они включают ограниченное количество типов элементов (в частном случае - один); регулярность же размещения однотипных элементов в пределах матрицы, за исключением БИС оперативных ЗУ, либо носит островковый характер, либо отсутствует вообще. Поэтому при сплошном описании однородной матрицы (состоящей из одинсаковых элементов) в описании необходимо указать координаты многих точек пгривязки, что является излишним. Количество точек привязки можно несколько сократить, если в структуре выделв ть регулярные островки и для адресации каждого из них указать по одной точке привязки, а размещение элементов в пределах островков описать параметрами мультипликации, т.е. указать ве.ггачины шагов.и количе:ство повторений по осям X и У. Но для этого необходимо вьшолнить оптимизированную декомпозидаю схемы по критерию минимизации описатгая, что вручную, при большом количестве элементов в матрице осущесрвить практически невозможно. Это обуславливает необходимость использования )гниверсальной ЭВМ, что затрудняет оперативное изготовление и увеличивает стоимость микросхем особенно при необходимости проработки нескольких различных вариантов. Кроме того, даже и в этом случае количество входной инфор мацки все же остается избыточным. Это является недостатком известной машины, приводящим к снижению ее эффек. тивности при изготовлении матричных Структур с нерегулярным расположением однотипных элементов. Цель изобретения - повышение г ффективности машины при воспроизведении топологии интегральных схем с маэричНой структурой за снижения заfpaf на программирование и уменьшение избыточности входной информации. Для этого в машину введен блов: цифрового маскирования, соединенный двухсторонними управляющими связями с блоком управления, выходом подключен ный ко входу процессора и соединенный кодовой шиной с блоками ввода информации, памяти, интерпретапии, буферным запоминающим устройством и процес- . сором. Блок цифрового маскирования содержит два регистра, две схемы сравнения, два счетчика, два элемента И, числовую матрицу, элемент неравнозначности, триггер, причем входы скемы сравнения подключены к выхо дам соответствующих регистров и первым входам соответствующих счетчиков, выходы - ко входам первого элемента И вькод которого подключен к информационному входу числовой матрицы и к управляющему выходу блока, входы ре|Гистров соединены с кодовым входом и управляющим входом блока, второй выход первого счетчика подключен к первому входу второго элемента И, выход которого соединен с управляющим выходом блока, второй выход второго счетчика соединен со входом первого счетчика, вторым входом второго эле(мента и управляющим выходом блока, утфавляющие входы счетчиков соедине|ны с управляющим входом блока, входы числовой матрицы соединены соотвёт ственно с первыми выходами счетчиков и управляющим входом блока, выход с первым входом элемента неравнозначности, второй вход которого соединен с выходом триггера, входьт которого соединены с управляющим входом блока, вы-ход элемента неравнозначности соединен с выходом блока, управляющий выход которого соединен с выходом второй схемы сравнения. На фиг. 1 показана структурная схема м щины; на фиг. 2 - пример выполнения блока цифрового маскирования; на фиг. 3 и 4 структурные матрицы и соответствующие им цифровые масеи (схематически). В состав машины входят: блок управ цения 1, блок 2 ввода информации, блок памяти 3j буферное запоминающее устройство 4, блок интерпретации 5, процессор 6, блок анализа 7 поворотов, блок коррекции 8, блок отклонения 9, блок контроля 10 токов отклонения, бло управления 11 приводам координатного стола, блок 1Й цифрового маскирования Блок 1 служит для распределения инфор мапин между устройствами машины и управления их взаимодействием. Блок 2 предназначен для ввода в машину информацин с перфоленты или печатающего устройства. Геометрическая ин4юрмаш1я, а также данные о технологических режимах заносится в блок памяти 3. ICpoме того в блоке 3 хранятся описания топологии стандартизовапных элементов, представляющие собой библиотеку типовых решений..,Текущая информация, с которой оперирует процессор при выполнении тех или иных стандартных процедур, зфанится в буферном запоминающем устройстве 4, Блок 5 осуществляет перевод описания топологии в машинное црецставлепие, выполняя декомпозицию фрагментов для выделения базовых элемен тарных фигур, с которыми оперирует Про;цессор. Процессор выполняет построение элементарных фигур, формирует временные параметры воздействия луча на материал, управляет -интенсивностью пучка, задает перемещение координатного стола, а также управляет операциями коррекции. Блок 7 задает для процессора вид фактического поворота элементарных фигур при сочетании поворотов старших к подчиненных топологических единиц. Блок 8 предназначен для выработки корректирующих воздействий с целью привязки местоположения луча по отношению к рабочему полю с учетом компенсации линейного сдвига и разворота ,осей координат, а также установки требуемых геометрических размеров поля отклонения. Блок 9 преобразует цифровые значения координат, в пропорциональньге токи для перемегйения в требуемое место поля отклонення и осуществляет смещение единичных полей отклонения в пределах полного поля отклонения. Блок 10 осуществляет контроль токов отклонения и смещения и корректирует последние при нарушении их поразрядных соотношений. Блок 11 управляет приводами перемещения координатного стола. ;В блоке 12 в цифровом виде записывает ;ся схема размещения элементов структуры, представляющая собой цифровую матричную .маску. Блок 1 имеет двусторонние связи для обмена управляющей информацией с блоком ввода 2 и блоком памяти 3, а также шины управляющих сигналов 13 и 14 для связи с блоком интерпретации, управляющие шины 15 и 16 - для связи с процессором. По ши происходит обращение к буферно-. му запоминающему устройству. По шине 18 осуществляется запись кодов п|эизнаков поворота фигур. По шине 19 блок 1 заправляет работой блока 8 при вьтолнении коррекций положения по мар керным знакам, которые поступают с соответствующих датчиков. Поиск марке ных знаков, выч1 сление составляющих поррешностн и реализация линейной коррекдии происходит при взаимодействии процессора и блока 8i соединенных двух сторонними связями; Управляющие связи 20 и 21 гфедназйаченУ дяй ления работой блока 12, который связь 22 соединен с процессором 6. Компен-. сация погрешности масштаба происходит в результате воздействия блока коррекции 8 по связи 23 на блок бтклонейия 9, а угловой разворот осей - при воздействии на блок 11. По связи 22 из блока 12 в процессор поступают сигналы, в соогветствии с которыми ,он воспр6ЖвоШт ли пропускает ToV или иной элемент структурной матрицы. Шф ровйе значения координат с выхода процессора поступают в блок оталонения 9, который варабатывает на управляющих выходах 24 и 25 пропорциональные отклоняющие токи. С выхода блока 9 Б процессор поступают сигналы об окончании переходнь1Х процессоров в циф аналоговых преобразователях. По двусторонним связям процессор управляет также операциями контроля и коррекции токов смещения, осуществляемых блоком 10 при поступлении на его входы с информационных входов машины 26 и 27 токов, снимаемых ооотаетстбенно в цепях катушек смещения и отклонения. По управляющим выходам 28 а 29 процессор управляет интенсивностью пучка (ГОКОМ и энергией), а по управля кзщеаду выходу 30 - его бланкированием. Управление же координатными приво дами осуществляется по управляющему выходу 31 при воздействии процессора Тш блок 11. С информационного входа 32в блок 11 поступают сигналы от датчиков перемещения координатного стола. Признак фактического поворота 4игур с выхода блока 7 поступает в пр цессор, настраивая его на преобразование координат фигур в соответствии с видом поворота. По управлянлцему выхо 33блок 11 осуществляет управление приводами координатного стола. С информационного входа машины 34 в блок 8 коррекции поступают сигналы с COOTV ветствующих датчиков. Обмен информацией между и устройствами машины осуществляе7ч; я по кодовой шийе 35. На ({ягг. 2 показаны: регистры 36 и 37, счетчики 38 и 39, схемы сравHeimis 40 и 41, элемент И 42, числовая матрица 43, триггер 44, элем€тт неравнозначности 45, элемент И 46. По управляющему входу 20j выполняется начальная установка, счетчиков. По управляющему входу 20 „ происходит в регистр кодов, опрепелякяцих номер строки и столбца структурной Матрицы, на пересечении когорых расположен воспроизводимый итга пропускаемый элемент. По управляю- щему входу 203 подаются сигналы , а по входу 20 - сиг На л записи в числовую матрицу, по входу 20 g - сигнал считывания. Сигналами на управляющих входах , и 20 устанавливается нулевое ЕЛИ единичное состойнйе григгер 44, На управляющем вы(оде 21 вырабатывается сигнал при равенстве номера элемента структурной Matv, рицы номеру ячейки числовой матрицы, а на управляющем выходе 21 - при равенстве номеров столбцов. На управляющих выходах 215 и 21 возбуждаются сигналы, при переполнении счетчиков 39 -и Зв, . На фиг. 3 и 4 штриховкой условно показаны однотипные элементы ной топологии, воспроизводимые на сяфеделенном этапе технологического процесса, причем на г. 3 таких элементов меньше, чем пропусков. Поэтому в числовой матрице они обозначены кодом 1. На фиг. 4 наоборот меньше пропусков, поэтому они кодируются единицами, а воспроизводимые элементынулями. Программа работы машины вво«дится с помощью блока 2 в блок памяти 3 под воздействием сигналов, формируемых блоком управления 1. В опис«1тельной части программы содержатся данные о взаимном размещении составных частей полного рисунка данного элемента матрицы, пля чего здесь приводятся координаты точек привязки, в которые должны быть помещены начала тех или иных частей рисунка. Кроме того, для всех подобных фрагментов указывается вид поворота их относительно первообразных фигур, описание которых npsiBOдится полностью в виде координат вершин контуров, образующих1}я гуры. 13се координаты вершин приводятся в собственной системе координат, в качестве начала которой берется пересечение линий, проходящих-через точки рисунки с
минимальными ординатой и абсциссой. В описании также указывается генеральнее начало отсчета, в качестве которого используется, например, левый нинший угол кристалла или начало координат левого нижнего элемента ,матрицы. Наконец, указывается шаг рйзмещения элементов матрицы по осям X и У. Генеральное начало отсчета и величины шагов являются обобществленными параметрами для данной матрицы, описани же каждого нового типа элементов приводятся отдельно. При этом допускается использование частей рисунков, описанных в другом элементе матрицы, или рисунков из библиотечного набора. Параметры технологических режимов облучения и инструкции выполнения служебных процедур (коррекций и контроля являются самостоятельными конструкциями матобеспечения и могут вводиться независимо от остального описания. Управляющая часть программы помимо задания алгоритма переадре- садии, т.е. последовательности воспроизведения частей рисунка данного элемента матричной структуры, содержит также данные о конфигурации размещения этого элемента в пределах матри1ВЫ. Для этого все элементы матрицы нумеруются по строкам и .столбцам, и в управляюще части программы в возрастающем порядке указываются номера тех элементов, которые, должны экспо1троваться. Э часть программы образует так называемую цифровую маску, которая заносится в блок 12. Для записи цифровой маски устанавливаются в нулевое состояние счетчики 38 и 39, выполняющие функцию адресных регист ров числовой матрицы 43. На кодовой шине 35 возбуждается число, определяющее номер первого воспроизводимого элемента матрицы. Код этого числа заносится в регистры 36 и 37, причем в регнстр 36 поступают старшие разряды числа/(номер строки матрицы), а в регистр 37 - младшие разряды (номер столбца). На вход счетчика 39 по входу 20а поступают сигналы, в результате пересчета которых осуществляется перебор всех ячеек числовой матрицы 43, Синхронно с сигналами счета на входе 20д возбуждаются сигналы записи. До тех пор, пока коды на выходёх счетчиков 38 и 39 не сравняются с кодами регистров 36 и 37, на выходе первого элемента И будет О, ив
соответствующие ячейки числовой матрицы будут записаны нули, поскольку выход элемента 42 подключен к информационному входу числовой матрицы. При
сравне1гаи номера элемента матрицы
с адресом ячейки, образующимся в счетчиках 38 и 39, на выходе элемента И 42 вырабатывается сигнал единичного уровня. -В соответствующую ячейку записывается 1, И;, кроме того, сигнал запроса по управляющему выходу 21 поступает в блок управльмгая 1. В этом случае в регистры 36 и .37 заносится код номера очередного элемента матрицы, и цикл заполнения числовой матрицьт продолжается. При переполнении счетчиков 39 и 38 на выходе второго. ;Элемента И 46 формируется сигнал, поступающий э блок управления 1. По этому сигналу определяется момент окончания заполнения числовой матрицы. В тех случаях, когда воспроизводимых элементов матрицы много, а пропусков мало, целесообразнее обозначать последние. При этом происходит запись обратной маски, осуществляемая аналогично ;предыдущему, за исключением того, что 1 обозначаются пропуски между; элементами структуры (фиг. 4). Запись обратной маски учитывается триггером 44, который при этом устанавливается в единичное состоявде. Размерность числовой матрицы в общем случае может не соответствовать размерности воспроизводимой структурной матрицы. Поэтому в случае недостаточного ее обыема структурная матрица разбивается на ряд подматриц, которые вводятся в блок 12 и воспроизводятся последовательно. Если размерность структурной матрицы мала, то размерность числовой матрицы при выборке из нее информации .ограничивается; Для этого в регистры 36 и 37 вводятся номера строк и столбцов ограничиваюших размерность матрицы; При воспроизведении рисунка из блсяса памяти 3 в буферное запоминающее устройство 4 заносятся координаты точек привязки фрагментов и величины шагов размещения элементов матрицы по осям X и У. Устанавливаются в исходное состояние счетчики 39 и 38, на управляющем, входе 20 возбуждается сигнал чтения . .и опрашивается первая ячейка числовой .матрицы 43. Если в блоке 12 было записано прямое изображение маски, то элемент неравнозначности 45 не оказыВает влияние на считанный из числовой матрицы сигнал, поскольку триггер 44 находится в нулевом состоянии, В случае же обратной маски на выходе блока образуется инверсный сигнал; На каждом такте опроса блока 12, т.е. считывания цифровой маски, процессор 6 суммирует К генеральному началу отсчета величину X размещения элементов йатрицы в строке и проверяет значение сигнала на связи 22. При появлении на ней сигнала единичного уровня опрос блока 12 прерывается, а на требуемом месте подложкиВОСПРОИЗВОДИТСЯ первый элемент структурной матрицы. При этом описания фрагментов из блока памяти 3 передаются поочередно в блок S, который осуществляет синхронное, с воспроизведением, разбиение их на элементарные фигуры. Координаты опорных точек каждой из фигур передаются на блока 5 в буферное запоминакшее ,
устройство 4 и служат исходной ннфэр-. мацией для процессора. Процессор вычисляет координаты всех промежутЬч- г ных точек фигур и выполняет необходимые их преобразования в соответствии с видом геометрических превращений компонента рисунка, определяемых блоком 7, а также с учетом их местоположе1гая на подложке. Блок 9 преобразует цифровые значения координат в пропор циональнйе координатные токи, отклоняя пучок в требуемое место гехнорогической зоны. После заверщения экспонирования подложки в данном единичном поле, отклонения снойа происходит обращение
к блоку 12 0 определяется местопопо женЬе очередного элемента мааркчной структуры в соответствии с ци4ровой маской. Момент окончания очередной строки структурной матрицы определяется по сигналу сравнения на управлякяцем выходе 212. ® перебор ячеек данной стро&и числовой матрицы продолжается до появления на управляющем выходе 21« сигнала переполнения счетчика 39. При этом содержимое счетчнка 38 увеличивается на единицу, чем осуществляется переход к след пющей строке числовой матрицы, а процессор суммирует к ординате строки величину шага перемещения У, выполняя переход к следующей строке структурной матрицы, после чего воспроизводятся элементы, расположенные в этой строке.
Аналогично воспроизводятся все элементы структу ил, обозначенные в данной
цифровой маске. -Признаком заверше)аия размещения всех элементов данной матрицы служит сигнал сравнения кодов в счетчиках 38 и 39 с кодами регистров 36 и 37 соответственно, в которы при воспроизведении содержится номер гра1тчнрго элемента матрицы. После воспроизведения последнего элемента процессор вырабатывает сигнал запроса на шине 15,, в соответствии с которым блок управления 1, воздействуя на блок ввода 2, заменяет использованную маску новой, и воспроизводктся очередной элемент структуры Такие циклы продолжаются до тех nqj, пока все элементы структуры не будут воспроизведены на соответствующих участках технологической зоны. После .этого с помощью блока 11 процессор заменяет технологическую зону переКсечтением коорд Шатного стола. После шремещения стола, а также периодическ в процессе востфоизвецения проверяется и при необходимости корректируется положетте пучка относительно маркерных знаков, что позволяет проводите, 4икрообработку с максимальной точностью взаимного расположения элемент Периодически с помощью блока 10 проверяется и корректируется поразряд1; ая . взвешенность токов, формируемых блоком 9.
Введение в структуру машины блока шгфрового маскирования позволяет у проотить процесс программирования и значительно сократить количество вводимой информации в случае интегральных схем с матричной структурой с нерегулярным располоя ением однотипных элементов, в частности матричных БИС. При автоматическом составлении программ электроннолучевой микрообрабопшг уменьшается время использовани51 универсальной ЭВМ, поскольку вместо многих сотен значейий координат, .которые необходимо вычислять, машина должна выдать лишь схему размещения элементов.
Формула изобретения
1. Цифровая машина для управления процессами электроннолучевой микрообработеи, содержащая б/гоки ввода информации, памяти, интерпретации, управления, анализа поворотов, буферное запоминающее устройство и процессор,, соединенные кодовой шиной и шинами
управляющих сигналов, блок коррекции, соединенный двухсторонними связями с процессором и подключенный упраэпяющнм и информационным входами соот ветственнй к выходу блока управления и к первому информационному входу машины, выходы блока коррекции подключены соответственно к первым вкодам блока отклонения и блока управления приводами координатного стола, второй вход которого соединен со вторым информационным входом маш.ины, выходы блока управления приводами координатного стола подключены соответственно к первому и второму управляющим выходам машины, блок управления природами Координатного стола соединен двухсторонними связями с процессором, выходы которого подключены соответственно к третьему, четвертому и пятом управляющим выходам машины,блок контроля токов отклонения и блок отклонения соединены двухсторонними связями с процессором, входы блока контроля токов Отклонения соединены соответственно с третьим и четвертым информационными входами машины, выход под-ключен ко второму входу блока отклонения, выходы которого подключены COOTV.
ветственно к шестому и седьмому управляющим выходам машины, выход блока анализа поворотов соединен с соответ- ствукдцим входом процессора, отличающаяся тем, что, с целью повышения эффективности при воспроизведении топологии интегральных схем с матричной структурой за счет снижения затрат на программирование и уменьшения избыточности входной информации, в нее введен блок цифрового маскирования, соединенный двухсторонними упраляющими связями с блоком управления, выходом подключенный ко входу гтроцессо{за и соединенный кодовой шиной с блоками ввода информации, памяти, интерпретаций, буферным запоминающим устройством и процессором.
2. Цифровая машина по п. 1, о тличающаяся тем, что блок цифрового маскирования содержит два регистра, две схемы сравнения, два счетчика, два элемента И, числовую матрицу, элемент неравнозначности, триггер, причем входы каждой схемы сравнения подключены к выходкам соответствующих регистров и первым выходам соответствующих счетчиков, а выходы соединены со входами первого элемента И, выход которого подключен к информационному входу числовой матрицы и к управляющему выходит блока,
входы регистров соединены с кодовым ;Входом и управляющим входом блока, второй выход первого счетчика подключен к первому входу второго элемента И, выход которого соединен с управляющим
выходом блока, второй выход второго счетчика соединен со входом первого рчетчика, вторым входом второго эле)1ента И и управляющим выходом блока j .управляющие входь счетчиков соединены
. с управляющим входом блока, входы числовой матрицы соединены соответственно с первыми выходами счетчиков и управляющим входом блока, выход подключен к первому входу элемента неравнозначности, второй вход которого соединен с выходом триггера, входы которого соединены с управляющим входом блока, выход элемента неравнозначности соединен с выходом блока, управляклций выход,кото{5ого соединен с выходом второй схемы сравнения.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 477417, М.Кл. G06 F 15/20, 1974.
2. Описание изобретения по заявке
№ 2392205/18-24 от 01.08.1976, (прототип).
702378




| название | год | авторы | номер документа |
|---|---|---|---|
| Ассоциативно-адресное оперативное запоминающее устройство | 1987 |
|
SU1451773A1 |
| ИЕРАРХИЧЕСКАЯ СИСТЕМА АССОЦИАТИВНОЙ ПАМЯТИ | 1992 |
|
RU2025795C1 |
| Ассоциативное запоминающее устройство | 1981 |
|
SU978196A1 |
| Матричный процессор | 1987 |
|
SU1534466A1 |
| ФОРМИРОВАТЕЛЬ СИГНАЛОВ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 1988 |
|
RU1637638C |
| Цифровая машина для управления процессами электроннолучевой микрообработки | 1976 |
|
SU635489A2 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Цифровой линейный интерполятор | 1987 |
|
SU1434406A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1675849A1 |
| ЬиЕОиЮЗНАЯ | 1973 |
|
SU383046A1 |

Ф Ф A Ф Ф Ф
TTi
/J / /
Stte. /
3f
55
uZr.Z
