Известные захватные приспособления -рамочного типа, снабжённые поворотными от кривошипов подхватами, имеют тот недостаток, что управление поворотом подхватов не автоматизировано и производится вручную. Такое управление сопровождается излишней затратой труда и снижением степени полезного использования кранов и т. п. подъёмных устройств.
Предлагаемое захватное приспособление устраняет отмеченный недостаток и имеет ту отличительную особенность, что для автоматического управления поворотом подхватов их кривошипы выполнены двухсторонними и одни их пальцы связаны с рамой приспособления пружинами, а другие - тросами с передвижной но вертикали колодкой, прицепляемой к грузовому крюку крана.
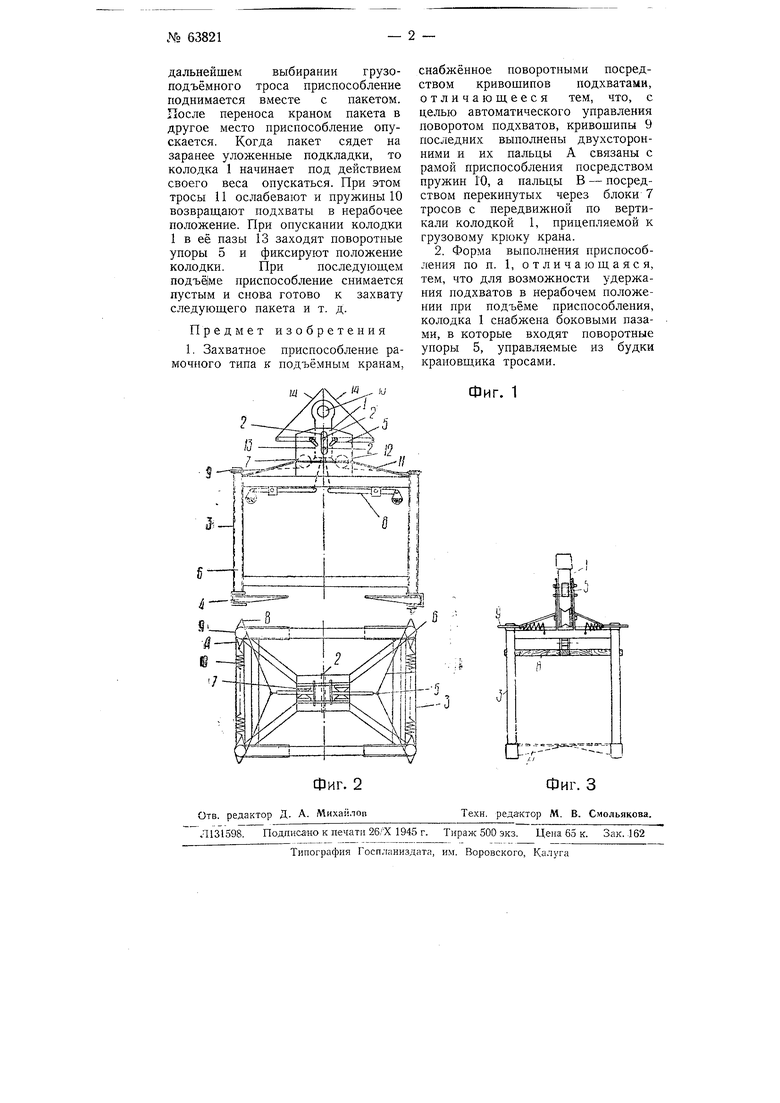
На чертеже фиг. 1 изображает вид примерной формы выполнения приспособления, фиг. 2- вид сверху приспособления по фиг. 1, а фиг. 3 - вид приспособления по фиг. 1 сбоку.
Приспособление предназначено для автоматического захвата, например, пакетов пиломатериалов при погрузочно-разгрузочных работах. Оно монтировано на цельносварной трубчатой П-образной раме 3. В угловых стойках рамы на валах 6 закреплены поворотные в горизонтальной плоскости консольные подхваты 4. На концах валов 6 прикреплены двухсторонние кривошипы 9, пальцы А которых соединены через спиральные пружины 10 с рамой 3, а пальцы В связаны тросами 11, перекинутыми через блоки 7, с передвижной по вертикали колодкой 1. Для направления движения колодки 1 в щеках 12 имеются пальцы 2, а в колодке 1 прорезь 2. Для удержания подхватов 4 в нерабочем положении при подъёме приспособления предназначены поворотные упоры 5, управляемые из будки крановш,ика тросами 14. Колодка 1 снабжена боковыми пазами 13 для упоров 5.
Для зажима пакета внутри захвата приспособление снабжено рычажными зажимами 8. Приспособление подвешивается к крюку крана за кольцо 15 колодки 1.
Посредством тросов 14 крановщик легко выводит упоры 5 из пазов 13 колодки 1. При подъёме грузоподъёмного крюка колодка 1 поднимается вверх и с помощью тросов 11 за кривошипы 9 поворачивает подхваты 4. При этом подхваты 4 заходят под пакет и становятся в положение 4, указанное нунктиром на фиг. 3. При
| название | год | авторы | номер документа |
|---|---|---|---|
| Крановый захват рамочного типа для пакетов | 1946 |
|
SU71019A1 |
| Захватное приспособление для подъема штучных грузов | 1941 |
|
SU67324A1 |
| Захват с лапами для подъема пакетов пиломатериалов и т.п. | 1941 |
|
SU66629A1 |
| Автоматический захват | 1961 |
|
SU142740A1 |
| Захватное приспособление для подъема листового материала в вертикальном положении | 1961 |
|
SU146462A1 |
| Захватное приспособление для подъема листового материала в вертикальном положении | 1960 |
|
SU135617A1 |
| Захватное устройство | 1979 |
|
SU874570A1 |
| Каретка для кабельного крана | 1936 |
|
SU50760A1 |
| Консольная опалубка | 1986 |
|
SU1404618A1 |
| Захватное устройство для пакетированных грузов | 1977 |
|
SU683978A1 |
