Для подъема краном пакетов пиломатериалов и т. п. примеияют захваты с лапами, она бженные монтированными на раме прижимиы ми ynoipaMH,
Максимальное иапользо1ва(Ние грузоподъемности и безопасность работы - ooBOBiHbie требовавия при зксплоатащии кранов. Большую роль в выполнении этих требований играют рациональные захватные ирнспособления.
Предлагаемый- заХ|ват предназначен для использования при подъеме KipaiHOM пакетов леса, помещаемых в портале ащтолесовоза.
Согласно изобретению yinopbr монтированы :на подъемно-опускном стержне. находящем|ся под давлением отклоняемой .им горизонтальной стренги подвесното каната, огибающего уравнительные блоки, расположенные «а paaie ino обеим сторонам стержней. С целью равномерного распределения давления мпоры расположены на .горизонтальном коромысле, поворотно монтированном на стержне.
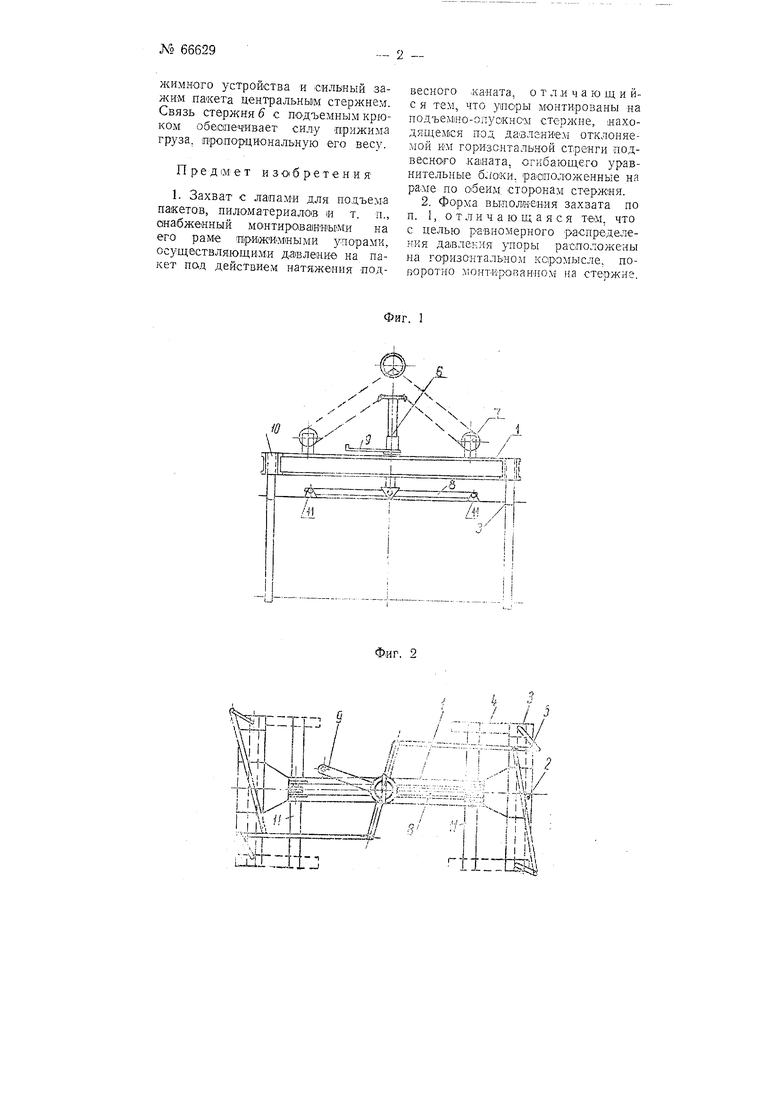
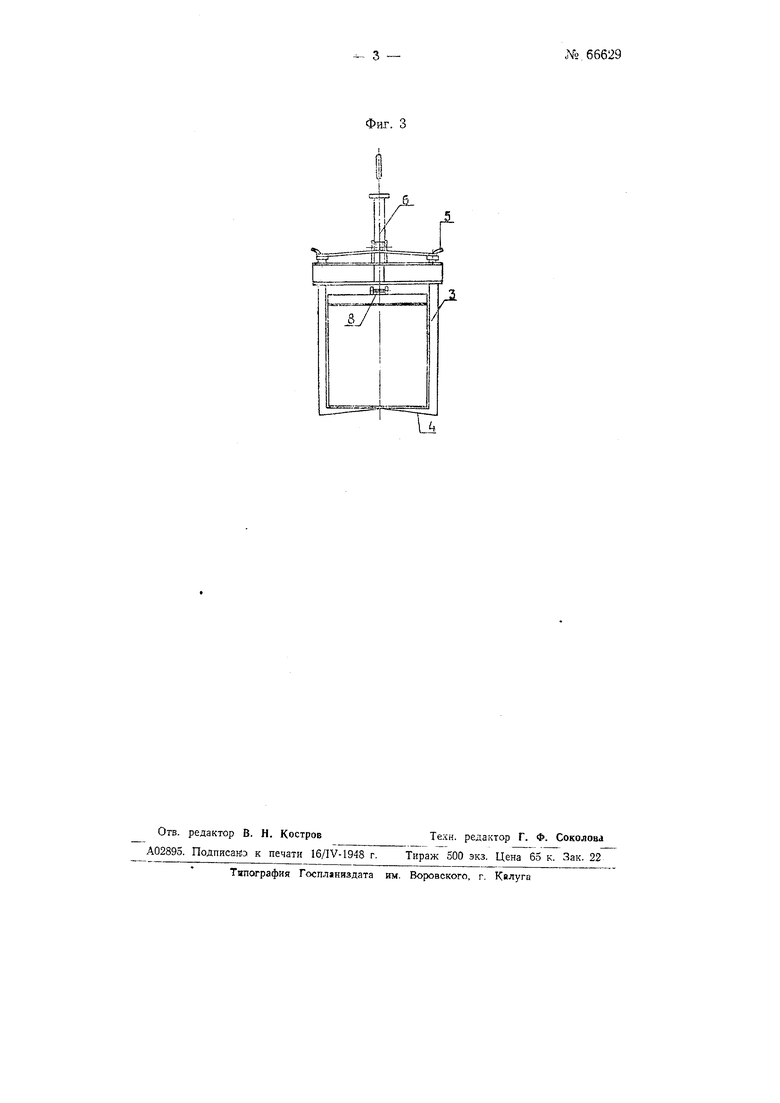
На фиг. 1 показам вид захвата сбоку, фшг. 2 - вид сверху, фит. 3- ВИД с торада.
Верхняя часть захвата, подвешиваамая на крюк крана, состоит из продольной балки /, образующей вмеоте с приваренньпш на концах плечами 2 раму. По углам рамы имеются монтированные в ее гнездах W поворачивающиеся в горизонтальной плоскости стойки 5 с лапами 4, каждая длиной 600 мм. Кривощипы 5, укрепленные на верхних частях стоек, соединены- рычагами с ручкой 9. Для зажима пакета захват имеет прижимное устройство. Особенностью этого устройства является применение центрального стержня 6, подвижного вдо..ь своей оси и связанного тросами с крюком крана через уравнительные блоки 7. На конце, стержня монтировано качающееся коромысло 8. несущее ма концах цапфы 11, зажимающие пакет пиломатериалов.
Кран с захватным устройством работает следующим образом. Захват с лапамИ 4, повернутыми параллельно балке /. опускается на пакет, уложенный на подкладках; при помощи ручки. 9 лапы 4 поворачиваются на 90°, и пакет может быть поднят. Подъему пакета предшествуют натяжение тросов пркл имного устройства и сильный зажим пакета центральным стержнем. Связь стержня 6 с подъемным крюком обеспечивает силу прижима груза, пролорциональную его весу.
П р е д iM е т изобретения
1. Захват с лапам-и для подъем-а пакетов, пиломатериалов и т. п., шабжеиный монтироваиздьсми на его раме прИ1Ж мными упорами, осуществляющими да1вленив на пакет под действием натяжения подвесного ,ка«ата, отличающийс я тем, что упоры монтированы на подъелино-опускном стержне, «аходящем1ся под давлгяием отклоняемой НМ горизолтальной стреяги подвесного каната, сгибающего уравнительные 6v(oKH. ра1С1положеНные на ра.ме по обеим, сторонам стержня.
2. Форма выполи-ения захвата по п. I, отличающаяся там. что с целью равномерного распределения давлекия упоры расположены на горизонтально.д коромысле, поБоротно монтирОпанном на стержнг.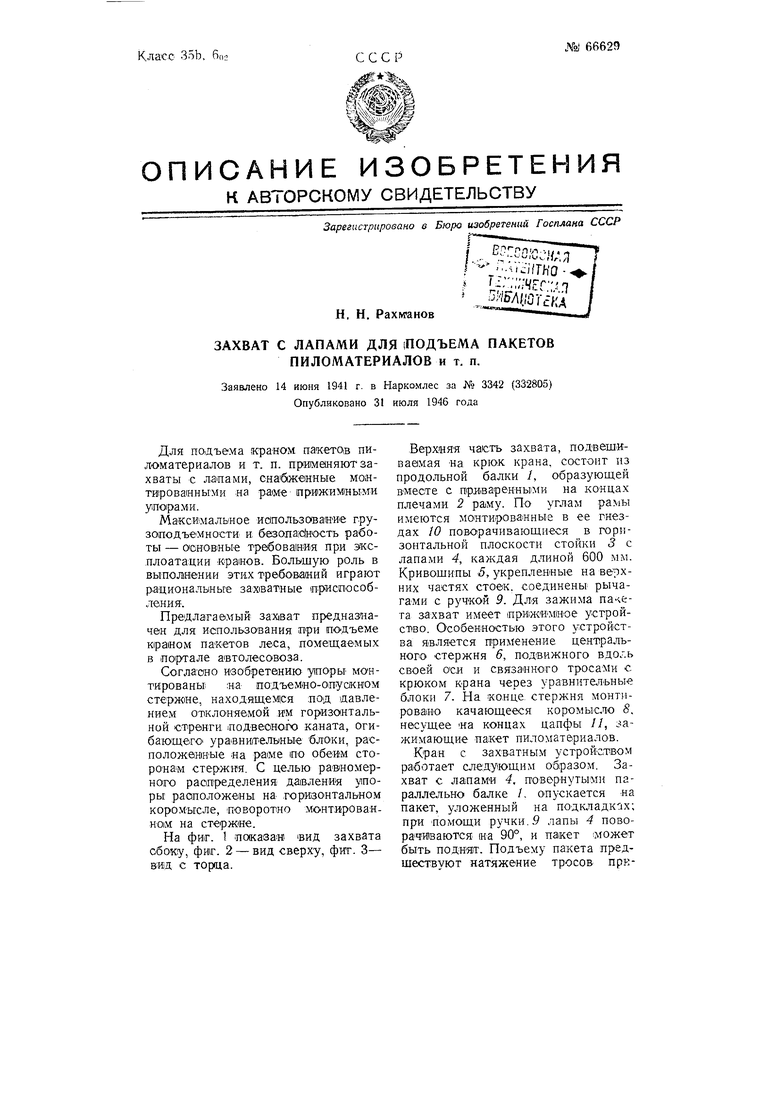
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное приспособление рамочного типа к подъемным кранам | 1941 |
|
SU63821A1 |
| Автоматический захват | 1961 |
|
SU142740A1 |
| Захватное приспособление для подъема листового материала в вертикальном положении | 1961 |
|
SU146462A1 |
| Крановый захват рамочного типа для пакетов | 1946 |
|
SU71019A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ПАКЕТА ПИЛОМАТЕРИАЛОВ | 1965 |
|
SU222955A1 |
| Захватное приспособление для подъема штучных грузов | 1941 |
|
SU67324A1 |
| ТАКЕЛАЖНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И КАНТОВАНИЯ ГРУЗА | 2003 |
|
RU2256597C2 |
| Захват для подъема пакета материалов | 1947 |
|
SU73776A1 |
| Захватное приспособление для подъема листового материала в вертикальном положении | 1960 |
|
SU135617A1 |
Фиг. 2
,J.,
