В ОСНОВНОМ авт. св. jYg 109523 опиган автоматический захват, состоящий из траверсы, рамы, механизма фиксации, тяг и рычагов, взаимодействующих с поворотными крюками в виде двунлечих зажимных рычагов, являющихся рабочими элементами захвата.
Отличительной особенностью онисываемого захвата является то, что в нем при менены новоротные в горизонтальной нлоскости нодхватные ланы, установленные на вертикальных валах, смонтированные по углам рамы. Валы взаимодействуют посредством конической передачи с рычажной системой управления. Конструктивные особенности позво ляют автоматизировать процесс захвата пакета пиломатериала. Кроме того, описываемый захват, с целью упрощения его конструкции и увеличения надежности захвата пакета пиломатериалов, может быть выполнен с двумя поворотными подпружиненными лапами, упирающимися своими концами на рамн},установленную на раме с противоположной стороны вертикальных валов захватов.
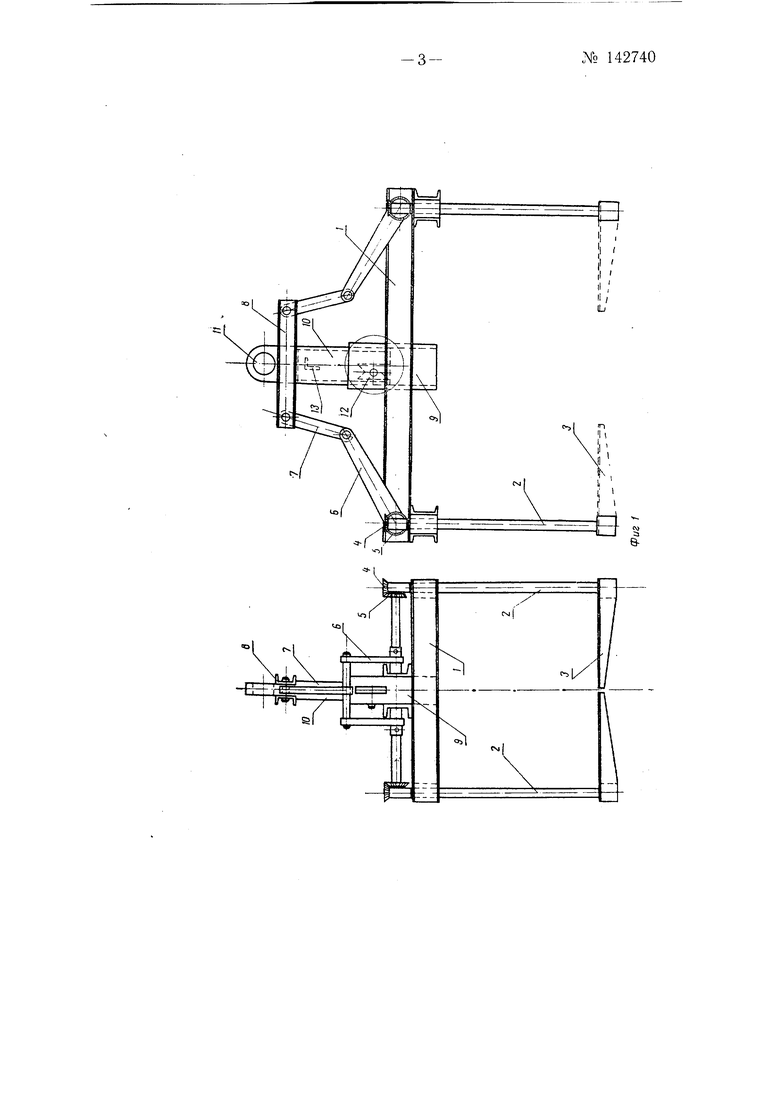
На фиг. 1 изображен автоматический захват в двух проекциях; на фиг. 2-автоматический захват в другом варианте исполнения в двух проекциях.
На раме 1 по ее углам установлены вертикальные поворотные валы 2 подхватных лап 3. На верхние концы валов посажены конические шестерни 4, находящиеся в зацеплении с коническими шестернямп 5 рычагов 6, сочлененных посредством тяг 7 с траверсой 8. Траверса установлена на перемещающемся в стойке 9 ползуне 10, который проушиной // кренится к подъемиому крану. .Механизм фиксации захвата, включающий в себя установленную в стойке 9 поворотную звездочку 12. взаимодействующую с ползуном, а также упоры 13, работает аналогично захвату, описанному в авт. св. ° 109523. Подхватные лапы обеспечивают захват пакетов, щтучных и других грузов, как лежащих на подкладках, так и на поддонах.
№ 142740 2В захвате (см. фиг. 2) могут быть применены только две подхватные :лапы / ;-- KMeidmHe, длину несколько большую, чем ширина ра-ыы. С нротивополджной.,стороны рамы этого захвата жестко установлена рамка 15:, на которую в рабочем положении онираются лапы 14. Подхватные лапы .мбнтируютс.я на вертикальных валах J6 посредством шарниров 17 и пластинчатых пружин 18. Угол поворота подхватных лап вниз ограничен фиксаторами 19.
Такое крепление лап обеспечивает им свободный поворот на 90° при захвате груза, а противоположные свободные их концы в начальный момент подъема груза опираются на опорную рамку 15.
Траверса, шарнирно соединенная через тяги с рычагами, при подъеме посредством конических передач поворачивает в рабочее положение подхватные лапы, а после опускания груза на траверса с ползуном перемеш,ается вниз и поворачивает подхватные лапы в нерабочее положение.
Предмет изобретения
1.Автоматический захват по авт. св. № 109523, отличаюш,ийся тем, что, с целью автоматизации процесса захвата пакета пиломатериа.ла, в нем применены поворотные в горизонтальной плоскости подхватные лапы, смонтированные по углам рамы на вертикальных валах, соединенных при помоихи конической передачи с рычажной системой управления.
2.Захват по п. 1, отличающийся тем, что, с целью упрощения конструкции И обеспечения надежного захвата пакета пиломатериала, в нем применены две поворотные подпружиненные лапы, по длине перекрывающие ширину захвата, а в рабочем положении опирающиеся на рамку, установленную с противоположной стороны рамы.

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватное приспособление для подъема штучных грузов | 1941 |
|
SU67324A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 1966 |
|
SU178465A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захватное приспособление для подъема листового материала в вертикальном положении | 1961 |
|
SU146462A1 |
| Автоматический захват | 1960 |
|
SU135619A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Захват с лапами для подъема пакетов пиломатериалов и т.п. | 1941 |
|
SU66629A1 |
| Устройство для переноса пакета изделий | 1986 |
|
SU1421665A1 |

I
