I
Изобретение относится к приборостроению, в частности к преобразователям электрнческих сигналов в механические, может быть использовано, например, в качестве поворотного устройства в регистрнрующих приборах.
Известны поляризованные электромагнитные упраатяющне элементы, состоящие из магннтопровода, якоря. Двух катушек возбуждения и катушкн управления ().
В этих элементах зависимость угла поворота якоря от величины сигнала управления линейна только при малых перемещениях якоря (2-3°), в противном случае система оказывается нелннейной.
Наиболее близким к данному изобретению техническим решением является электромагнитный управляющий элемент, особенность которого - выполнение рабочей поверхности магнитопровода с явно вы|}аЖеннымн полюсами и профнлированнем ее за пределами последних (2).
Эта форма рабочей поверхности магнитопровода повыщает жесткость магнитной пружины при малых углах поворота якоря и обеспечивает повышение чувствительности с ростом угла поворота якоря до 9°. Прн
углах поворота свыше 9° чувствительность вновь падает.
Цель изобретения - полученне линейной амплнтудной характеристики при больших углах поворота, например 15-18°, путем компенсацин влияния нелннейной электрнческой пружины, зависящей от управляющего тока по квадратичному закону.
Указанная цель достигается тем, что в известном поляризованном электромагнитном управляющем элементе, содержащем магнитопровод, якорь, постоянные магниты и управляющие катущки, цилиндрическая поверхность полюсных наконечников якоря ограничена кривыми второго порядка или - в первом приближении - ломаными прямыми.
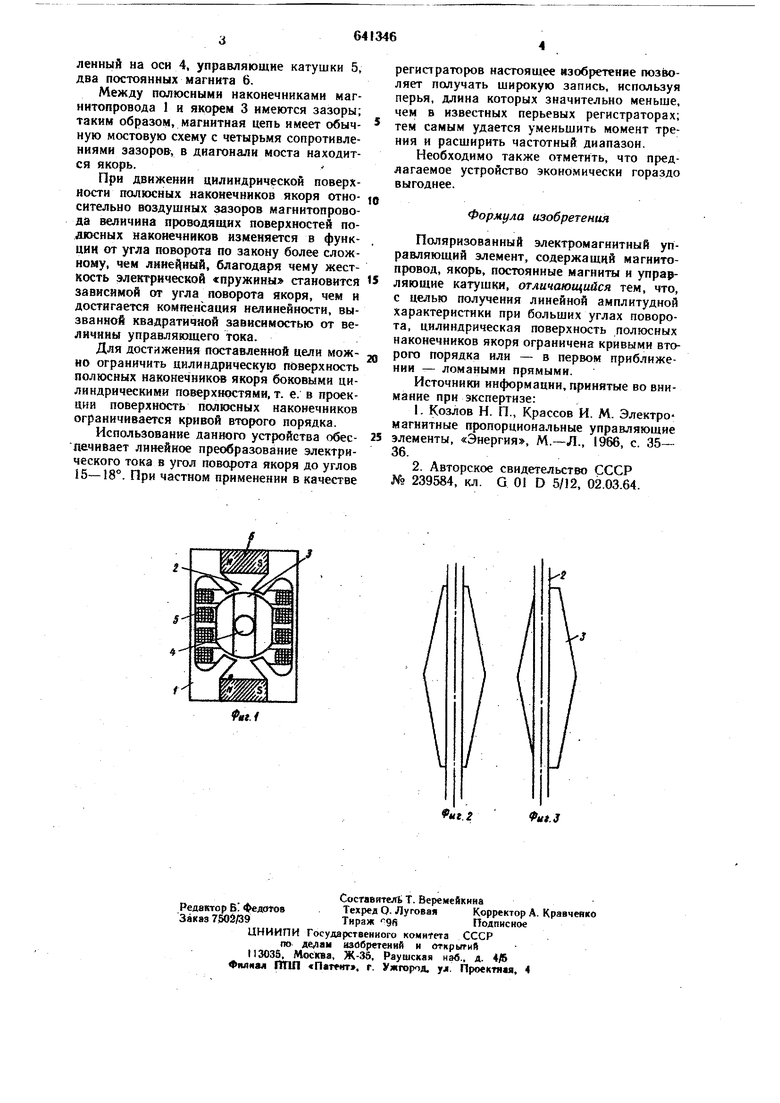
На фиг. 1 изображен общий вид предложенного поляризованного электромагнитного управляющего элемента; на фиг. 2 - проекция воздущного зазора магнитопровода на цилиндрическую поверхность якоря при среднем положении якоря; на фиг. 3 - то же, при отклоненном паложенин якоря.
Устройство содержит магннтопровод I, разделенный воздушным зазором 2 на две симметричные половнны, якорь 3, закрепленный на оси 4, управляющие катушки 5, два постоянных магнита 6.
Между полюсными наконечниками магнитопровода 1 и якорем 3 имеются зазоры; таким образом, магнитная цепь имеет обычную мостовую схему с четырьмя сопротивлениями зазоров, в диагонали моста находится якорь.
При движении цилиндрической поверхности полюсных наконечников якоря ОТНОсительно воздушных зазоров магннтопровода величина проводящих поверхностей полюсных наконечников изменяется в функции от угла поворота по закону более сложному, чем линейный, благодаря чему жесткость электрической «пружины становится зависимой от угла поворота якоря, чем и достигается компенсация нелинейности, вызванной квадратичной зависимостью от величины управляющего тока.
Для достижения поставленной цели можио ограничить цилиндрическую поверхность полюсных наконечников якоря боковыми цилиндрическими поверхностями, т. е. в проекции поверхность полюсных наконечников ограничивается кривой второго порядка.
Использование данного устройства обеспечнвает линейное преобразование электрического тока в угол поворота якоря до углов 15-18°. При частном применении в качестве
регистраторов настоящее изобретение позволяет получать широкую запись, используя перья, длина которых значительно меньше, чем в известных перьевых регистраторах; тем самым удается уменьшить момент трения и расширить частотный диапазон.
Необходимо также отметить, что предлагаемое устройство экономически гораздо выгоднее.
Форм1/ла изобретения
Поляризованный электромагнитный управляющий элемент, содержащий магиитопровод, якорь, постоянные магниты и упрарляющие катушки, отличающийся тем, что, с целью получения линейной амплитудной характеристики при больших углах поворота, цилиндрическая поверхность полюсных наконечников якоря ограничена кривыми второго порядка или - в первом приближении - ломаными прямыми.
Источники информации, принятые во внимание при экспертизе:
1.Козлов Н. П., Крассов И. М. Электромагнитные пропорциональные управляющие элементы, «Энергия, М.-Л., 1966, с. 35- 36.
2.Авторское свидетельство СССР № 239584, кл. О 01 D 5/12, 02.03.64.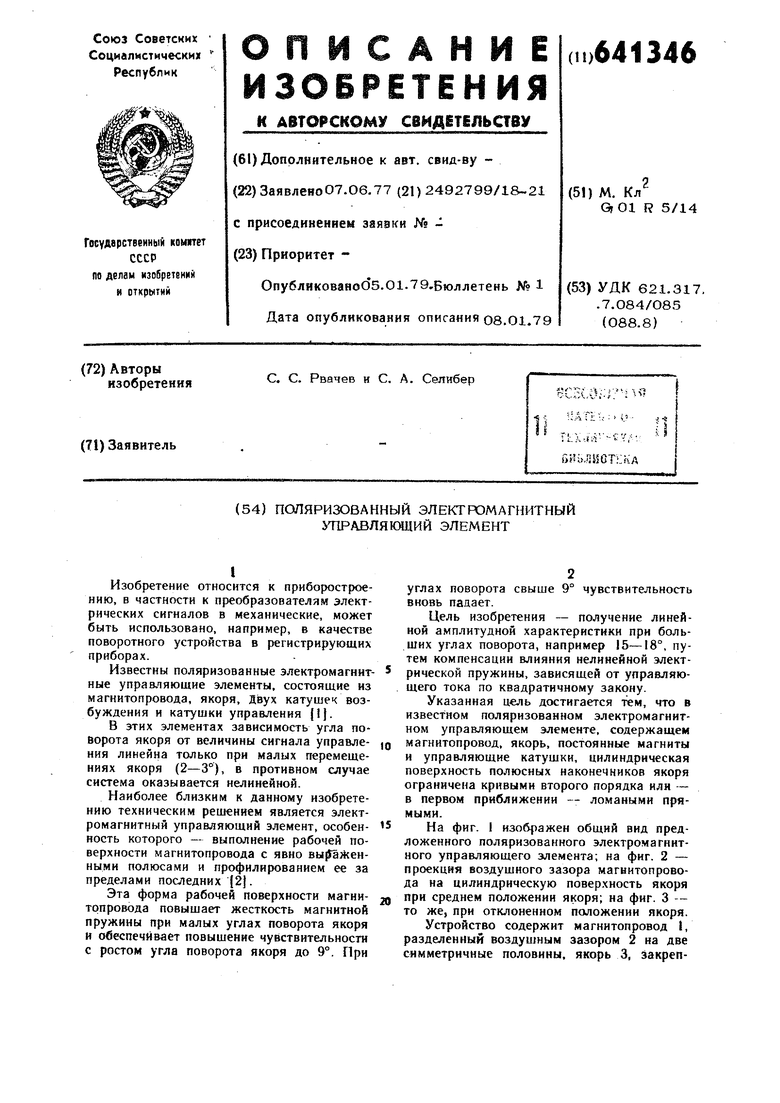
| название | год | авторы | номер документа |
|---|---|---|---|
| Поляризованный электромагнитный управляющий элемент | 1981 |
|
SU991312A2 |
| Поляризованный электромагнитный преобразователь | 1985 |
|
SU1310732A1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |
| ВЫСОКОЧУВСТВИТЕЛЬНЫЙ МАГНИТНЫЙ РАСЦЕПЛЯЮЩИЙ МЕХАНИЗМ | 2002 |
|
RU2214644C1 |
| Электромагнитный прибор | 1981 |
|
SU1046689A1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| Электромеханический преобразователь сигналов | 1975 |
|
SU552733A2 |
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УГЛА ВРАЩАЮЩЕГОСЯ РОТОРА ГИРОСКОПА | 1979 |
|
RU2107261C1 |
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
ыг.2
ut.3
