Изобретение относится к системам автоматического регулирования, частности, к системам управле1шя приводами исполнительных механизмов металлорежущих станков с программным утфавлением и промышленных роботов.
Известны импульсные следящие системы, содержащие датчик, задатчшс, элементы сравнения, усилители, коммутаторы, блок управления, шаговые двигатели и исполнительный механизм, причем элементы сравнения выполнены в виде последовательных релейного блока и р&версивного счетчика l-3j.
Из известных приводов наиболее блиэким по технической сущности является злектрогидравлический следящий привод, содержащий первый генератор, выход которого подключен к первому входу блок умножения, задатчик, выход которого ч&рез релейный блок соединен со входом реверсивного счетчика, второй генератор, первый выход Которого через последовательно соединенные первый коммутатор
и первый шаговый двигатель соединен с первым входом гидроусилителя, а второй выход через последовательно соединешвле второй коммутатор и второй шаговый /шигатель соединен со вторым входом гидроусилителя, выход которого соединен со входом исполнительного двигатвл5, выход которого соединен со входом датчика, выход которого Соединен со вторым входом релейного блока, третий вход которого соединен с первым выходом блока .сиш ронизации 4 .
Недостатком известного привода явлs ются его низкие точность и быстродействие.
Целью изобретения является повыщ нне точности и быстродействия привода.
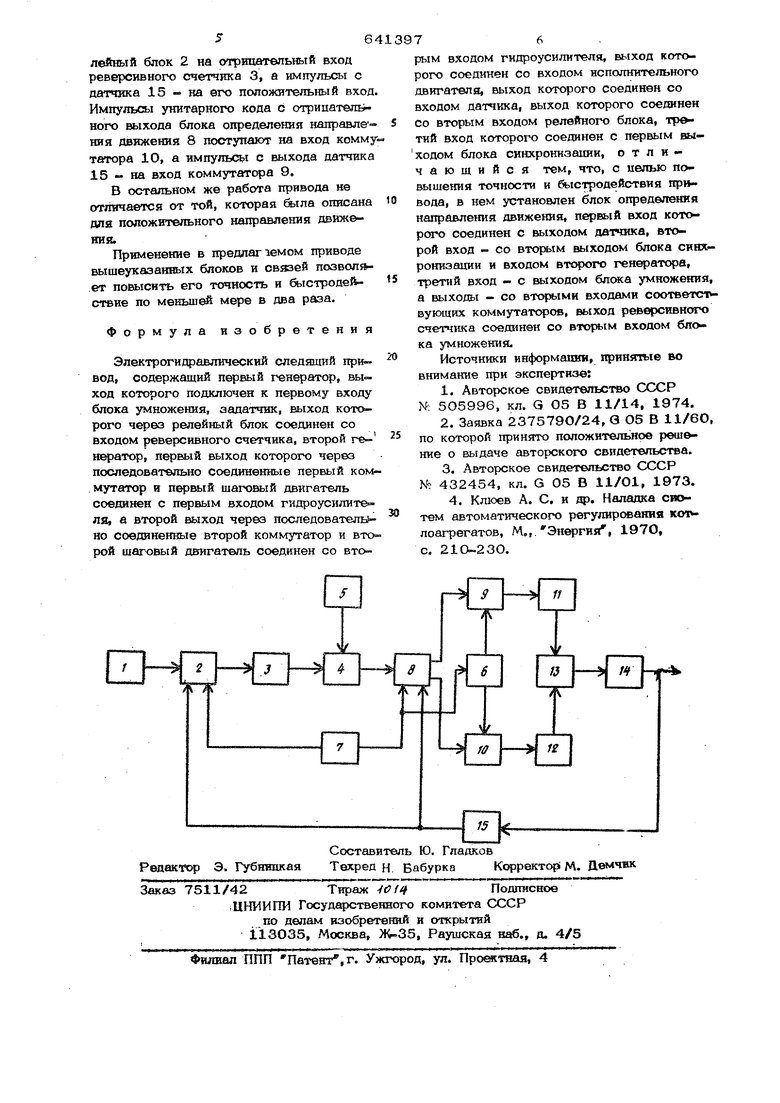
Поставленная цель достигается тем, что в приводе установлен блок определения направления движения, первый вход Которого соединен с выходом датчика, второй вход - со вторым выходом блсжа синхронизации и входом второго генврато(- ра, третий вход - с выходом блока умножения, а выходы - со вторыми входами соотвеачугвуюишх коммутаторов, выход реверсивного счетчика соединен со вторым входом блока умножения. Блок-схема устройства представлена на чертеже, В схему включены: задатчик 1, релейный блок 2, реверсивный счет чик 3, блок умножения 4, пераый и вто рой г«нераторял 5, 6, блок синхронизации 7, блок определения направления движ&ния 8, первый и второй коммутаторы 9, 10, первый и второй шаговые двигатели 11, 12, гидроусилитель 13, исполнительный двигатель 14, датчик 15. Привод работает следующим образом, В исходном положении реверсивный счетчик 3 готов к приему информашш, а шаговые двигатели 11 и 12 равномерно вращаются с одинаковой скоростью в одном направлении, например по чазовой стрелке, под действием последовательности импульсов, которые задаются вторым генератором 6 (генератором задающей чозтоты). Золотник .гидроусилителя 13 находится в нейтральном положении. Дав;ления в рабочих полостях исполнительного двигателя 14 равны. Импульсы на выходе датчика 15 при этом отсутствуют. При подаче пачки импульсов с выхода задатчика 1, соответствующих, например, положительному перемещению нагрузки на выходе привода, импульсы эти после синхронизации с импульсами блока скнх ронизации 7 через релейный блок 2 (блока сигнатуры) поступают на вход реверсивкого счетчика 3, в котором сохраняются в виде положительного числа, Одновремеэ но с этим на выходе реверсивного счет чика 3 формируется код, поступающий на первый вход блока умножения 4, на второй вход которого поступают импульсы опорной ч зтоты с первого генератора 5. При этом на №1ходе блока умножения 4 фа{ мируются импульсы унитарного кода, частота следования которых соответствуе прямому коду числа в реверсивном счетч ке 3. Синхронизация, проводимая в блоке определения направления движения 8, исключает возможность наложения импуль сов несущей частоты на импульсы с выхода блока умножения 4. Импульсы с положительного выхода блока синхрониза ции 7 поступают на вход коммутатора 9, где смешиваются с импульсами несущей частоты. Это приводит к мгновенному увеличению частоты управления шаговьщ двигателем 11, который начинает обгонять шаговый двигатель 12. При обгоне вал шагового двигателя 11, жеспсо связанный с входным валвком гидроусилителя 13, заставит золотник гидроусилителя переместиться вправо от нейтрального положения. В результате sfraro возникает перепад давлений в рабочих полостях исполнительного двигателя 14, кoтqpый и 1зовет п емещенне нагрузки и датчика 15. В свою очередь это приведет к появлению импульсов на выходе датчика 15, которые поступят на вход блока ои ределения направления движения 8 и через релейный блок 2 поступят также на отрицательный вход реверсивного счетчика 3. После синхронизации импульсы с датьчика 15 через блок определения направления движения 8 поступают на вход коммутатора Ю, где смешиваются с импульсами несущей частоты. Это приводит к тому, что шагом. и двигатель 12 начнет отрабатывать сигнал рассогласования, то есть станет догонять шаговый двигатель 11. По мере поступления импульсов с датчика 15 на отрицательный вход реверсив:; кого счетчика 3 происходит уменьшение его содержимого, то есть числа в прямом коде на выходе реверсивного счетчика 3, и снижение частоты унитарного. кода на выходе блока умножения 4. Это вызывает еныление частоты управления шаговым двигателем 11 вплоть до выравнивания этой частоты с частотой управления шаговым двигателем 12. Таким образом, отработка пачки импульсов заканчивается на том, что в реверсивном счетчике 3 число становится равным нулю, на ш,1хрде блока умножения 4 пропадают импульсы унитарного кода, и частоты управления шаговыми двигат&лями 11 и 12 выравниваются до несущей частоты генератора 6. Золотник гидроусилителя 13 займет прежнее нейтральное положение, а нагрузка на ш 1ходе привода и датчик 15 прекратят перемещение. При отработке непр ллвной последовательности импульсов между поступлением управляклцего сигнала на входы коммутаторов 9 и Ю возникает aanaaaM ванке, величина которого определяется величиной задава ой скорости. В случае отработки задашюй последовательности импульсов соответствующих отрицательному пер@«1ешению нагрузки на выходном валу привода, импульса с ылхода задатчика 1 поступвют через ре лейный блок 2 на отрицательный вход реверсивного счетчика 3, а импульсы с датчика 15 - на его положительный вход Импульсы унитарного кода с отрицатель;ного выхода блока определения налравлвни я движения 8 поступают на вход комму татора 10, а импульсы с выхода датчика 15 на вход коммутатора 9. В остальном же работа привода не отличается от той, которая бьтла ошюана дан положительного направления движения. Применение в предлаг емом приводе вышеуказанных блоков и связей позвол .ет повысить его точность и быстродей ствие по меньшей мере в два раза. Формула изобретения Электрогидравлнческий следящий привод, содержащий пер№1й генератор, вы. ход которого подключен к первому входу блока умножения, аадатчик, выход которого через релейный блок соединен со входом реверсивного счетчика, второй генвратор, первый выход которого через последовательно соединенные первый коммутатор и первый шагоиз1й двигатель соединен с первым входом гидроусилите ля, а второй выход через последовательно соединенные второй коммутатор и вто рой шаговый двигатель соединен со вторым входом гидроусилителя, KOTt рого соединен со входом исполнительного двигателя, выход которого соединен со входом датчика, выход которого соединен со вторым входом релейного блока, третий вход которого соединен с первым выходом блока синхронизации, отличающийся тем, что, с целью повышения точности и быстродействия пр вода, в нем установлен блок определения направления движения, первый вход которого соединен с выходом датчика, второй вход - со вторым к 1ходом блока синхронизации и входом второго генератора, третий вход - с выходом блока умножения, а выходы - со вторыми входами соответст вующих коммутаторов, выход реверсивного счетчика соединен со вторым входом блока умножения. Источники информации, 1фин$пые во внимание при экспертизе: 1.Авторское свидетельство СССР N: 5О5996, кл. Q 05 В 11/14, 1974. 2.Заявка 237579О/24, Q Об В 11/60, по которой принято положительное реш&ние о выдаче авторского свидетельства. 3.Авторское свидетельство СССР № 432454, кл. G 05 В 11/01, 1973. 4. Клюев Л. С. и др. Наладка автоматического регулирования кея лоагрегатов, М,,.Энергия, 1970, с. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Многоканальное устройство для управленияшАгОВыМи дВигАТЕляМи | 1978 |
|
SU798731A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| Устройство для программного управления шаговым двигателем | 1983 |
|
SU1141378A1 |
| Цифровая система программного управления роботом-манипулятором | 1979 |
|
SU943644A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
