(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ РОБОТОМ JVi А НИ ПУЛ ЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления для робота-манипулятора | 1977 |
|
SU713682A1 |
| Система программного управления для робота-манипулятора | 1978 |
|
SU744456A1 |
| Цифровой генератор функций | 1983 |
|
SU1108426A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
| Устройство для автоматического наведения оси сварочного инструмента на линию стыка при сварке пространственных швов | 1979 |
|
SU863227A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
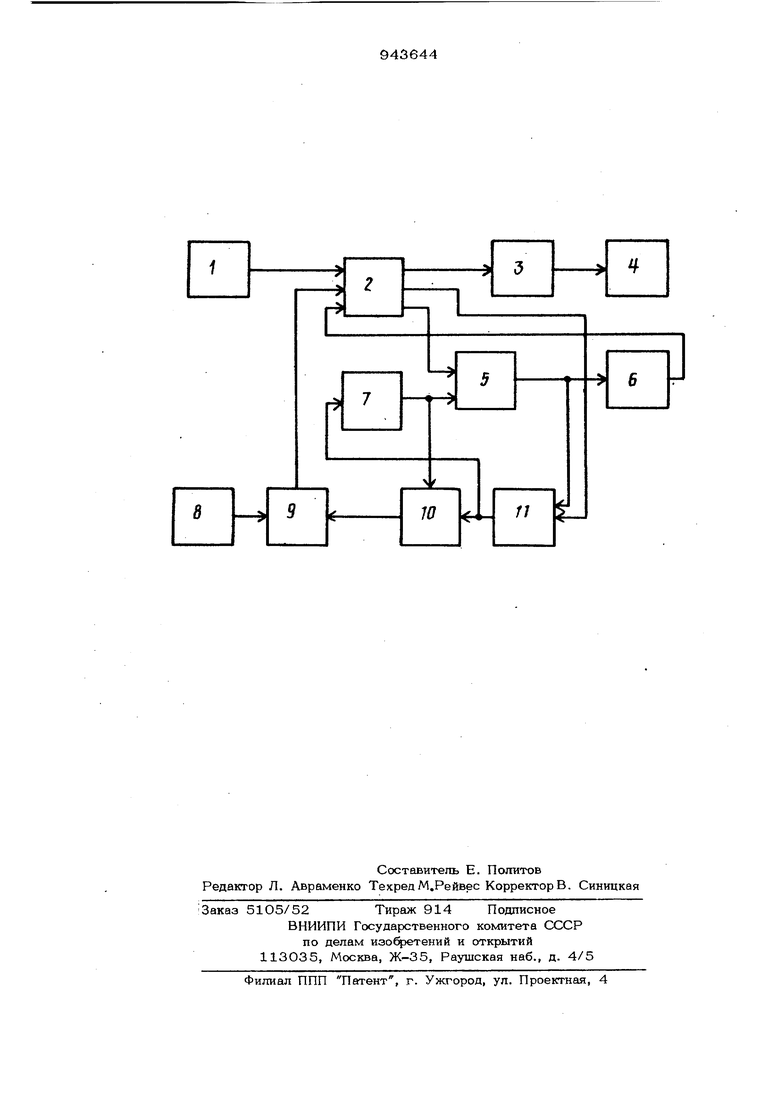
Изобретение относится к программном управлению роботами-манипуляторами и может быть использовано для управления движением рабочего органа промьпиленного робота, например, при точечной сварке Известна цифровая система программного управления роботом-манипулятором содержащая блок задания перемещения, приводы, датчики перемещений, логически блоки, соединенные с приводами, блок памяти, имеет низкую производительность из-за колебаний рабочего органа, обусловленных старт-стопным режимом fl . Наиболее близким к предлагаемому является система, содержащая блок эта. лонного сигнала и последовательно соединенные управляемый генератор, коммутатор и шаговый привод, связанный с исполнительным механизмом, а также последовательно соединенные нуль-орган, элемент И, реверсивный счетчик и первый блок памяти, второй вход которого подключен к выходу нуль-органа, вход которого соединен с выходом реверсивного счетчика, второй вход которого подключен ко .второму выходу коммутатора, третий выход которого соединен с вторым входом элементами, выход которого через блок памяти подключен к второму входу коммутатора 2 J . Недостйтками этой системы являются ее сложность и низкая точность, обусловленные двойным преобразованием информации о превращении координат из цифровой формы в аналоговую и обратно. Цель изофетения - упрощение и повьпиение точности системы. Поставленная цель достигается тем, что система содержит блок умножения, первый вход которого соединен с выходом блока эталонного сигнала, второй вход с выходом первого блока памяти, а выход - с третьим входом коммутатора. На чертеже показана функциональная схема цифровой системы программного управления роботом-манипулятором. Система содержит управляемый ге нератор 1, коммутатор 2, шаговый привод 3, исполнительный механизм 4, эле мент И 5, блок памяти 6, нуль-орган 7 блок эталонного сигнала 8, блок умножения 9, блок запоминания амплитуды 1О и реверсивный счетчик 11. Система программного управления работает образом, В процессе обучения оператор с помощью управления генератора 1 перемещает исполнительный механизм 4 в требуемую точку данной координаты, при этом выходной сигнал управляемого генератора 1 в виде последовательности импульсов поступает одновременно на привод 3 и реверсивный счетчик 11, в котором происходит алгебраическое суммирование информации о перемещениях п данной координате. Чтобы перенести информацию из реверсивного счетчика 11 в блок 6 памяти,, оператор запускает блок 8 эталонного сигнала, выполненног в виде управляемого по частоте генератора, частота импульсов на выходе которого изменяется оптимальным в смысле какого-либо критерия образом, например, , оптимальным в смысле быстродействия исполнительного органа. Частота импульсов блока эталонного сигнала 8 поступает в блок умножения 9, где умн жается на код, хранящийся в блоке запоминания амплитуды 1О, выполненного в виде регистра числа и представляющий собой информацию о величине приращения по данной координате. Таким офазом, с выхода блока умножения 9 в блок памяти 6 через коммутатор 2 поступает последовательность импульсов, оптималь ная в смысле быстродействия исполнительного механизма 4 к пропорциональная требуемому перемещению. Одновременно через коммутатор 2 и элемент И 5 последовательность иМпупЬсов пос«тупает на вычитающий вход реверсивног счетчика 11. После того, как вся информация о перемещении вы чтете я из реверсивного счетчика 11, что соответствует переходу исполнительного механизма 4 в точку, элемент И 5 закроется нуль-органом 7, и пр ратится подача импульсов на входы памяти 6 и реверсивного счетчика 1 Тем же сигналом нуль-органа 7, которы может быть выполнен например, в виде схемы ИЛИ, входы которой соединены с поразрядными выходами реверсивного счетчика, сбрасывается в нуль блок запоминания амплиту/Ш 10. Система управления готова к программированию перемещения в следующую точку. В режиме воспроизведения записанная при о чении программа через коммутатор 2 поступает из блока памяти 6 на щаговый привод 3, обеспечивая оптималыное по быстродействию перемещение исполнительного органа в заданную позицию. Применение изофетения позволяет упростить цифровую систему программного управления роботом-манипулятором и повьюит ее точность. Формула изобретения Цифровая система программного управления роботом-манипулятором, содержащая блок эталонного сигнала и Последовательно соединенные управляеК{ый генву ратор, коммутатор и щаговый привод, связанный с исполнительньп механизмом, а также последовательно соединенные нуль-орган, элемент И, реверсивный счетчик и первый блок памяти, второй вход которого подключен к выходу нульоргана, вход которог о соединен с выходом реверсивного счетчика, второй вход которого подключен к второму вьпсоду коммутатора, третий выход которого соединен с вторьпл входом элемента И, выход которого через второй блок памяти подключен к второму входу коммутатора, отличающаяся тем, что, с целью упрощения и повьпиения точностисистемы, она содержит блок умножения, первый вход которого соединен с выходом блока эталонного сигнала, второй вход - с выходом первого блока памяти, а выход - с третьим входом коммутатора. Источники информации, принятые во внимание при экспертизе 1 . Авторское свидетельство СССР № 541147, кл. GO5 В 19/42, 1972, 2. Авторское свидетельство СССР по .заявке № 2447236/18-24, кл. В 25 J 9/00, 1974 (прототип).
