1
Изобретение относится к электрогидравлическим исполнительным устройствам и может быть применено в различных машинах и механизмах в качестве привода элементов с большой массой, а также для исследования влияния начальных осевых перекрытий гидрораспределителя на статические и динамические характеристики привода.
.Известен электрогидравлический привод,содержащий электромеханический преобразователь, гидрораспределитель «сопло-заслонка, управляющий гидрораспред литеаь с подпружиненнымплунжером, гидромеханическое корректирующее устройство и магистрали нагнетания и слива (I}.
Из-за влияния пружин золотника на работу коррекции, привод имеет ограниченную добротность, а невозможность регулировки начальных осевых перекрытий гидрораспределителя не позволяет добиться оптимального сочетания статических и динамических характеристик, что уменьшает его точность и устойчивость.
Известен также электрогидравлический привод, содержащий электромеханический преобразователь, гидрораспределитель «сопло-заслонка, управляющий гидрораспределитель с гидравлической обратной связью по положению его плунжера, гидродвигатель с рабочими полостями, гидромеханическое корректирующее устройство обратной связи по динамическому давлению и магистрали нагнетания и слива (2}.
Однако данный привод имеет низкие точность и устойчивость из-за невозможности настройки начальных осевых перекрытий гидрораспределителя.
Целью изобретения является повышение
точности и устойчивости.
Цель достигается тем, что управляющий гидрораспределитель выполнен в виде четырех однокромочных цилиндрических золотников, каждый из которых подсоединен к одной из рабочих полостей гидродвигате5 ля и к одной из магистралей, а плунжер снабжен регулируемыми упорами для взаимодействия с золотниками.
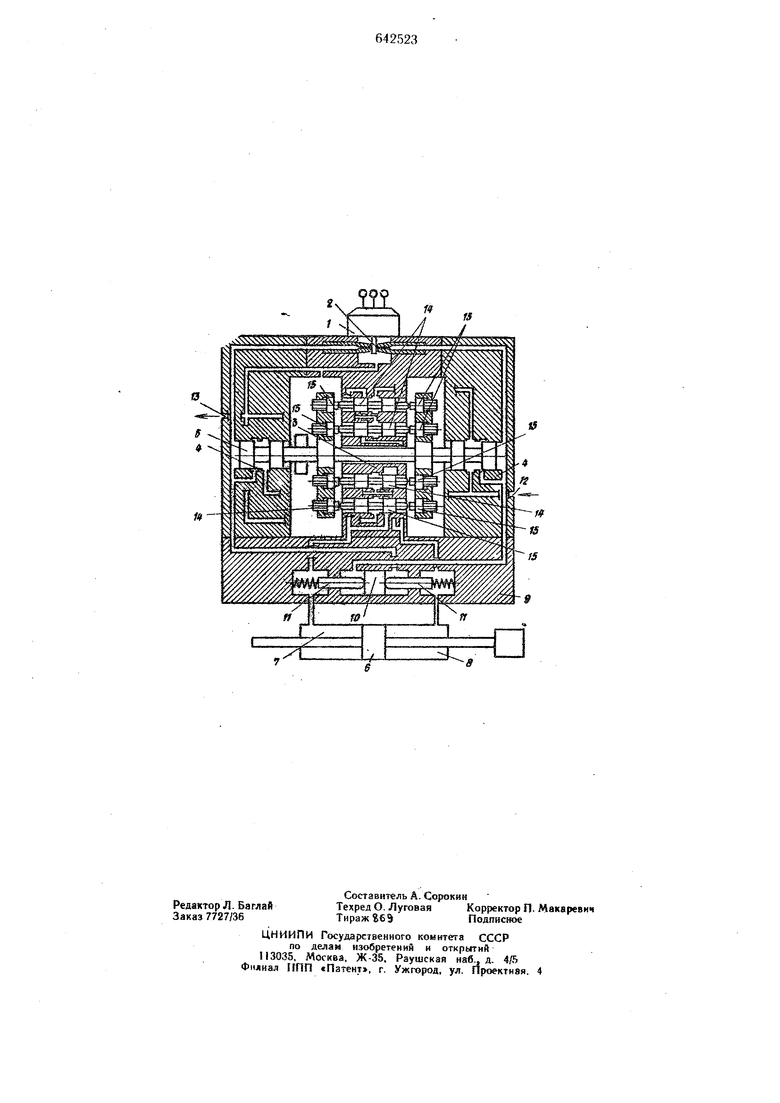
На чертеже показан предлагаемый электрогидравлический привод.
Привод содержит электромеханический преобразователь 1, гидрораспределнтель «сопло-заслонка 2, управляющий гидрораспределнтель 3 с гидравлической обратной связью на окнах 4 по положению его плунжеpa 5, гидродвигатель 6 с рабочими полосстями 7 и 8, гидромеханическое корректирующее устройство 9, включающее поршень 10 И два подпружиненных плунжера 11, магистраль нагнетания 12 и магистраль слива 13.
Управляющий гидрораспределнтель 3 выполнен в виде четырех однокромочных цилиндрических золотников 14, а плунжер 5 сйабжен регулируемыми упорами 5, взаимодействующими с. этими золотниками.
Каждый из золотников 4 подсоединен к рабочим полостям 7 и 8 н к магистралям 12 и 13 (например в сочетаниях, показанных на черт.).
Привод работает следующим образом.
При подаче сигнала на электромеханический П1зеобразователь I заслонка гидрораспредё;1ителя 2 перемещается, изменяя проводимости зазоров между соплами и заслонкой. Разность расходов через эти зазоры приводит к смещению плунжера 5 от среднего положения. Упоры 15 перемещают золоткики .14, одна ИЗ полостей 7, 8 соединяется с магистралью 12, а другая - с магистралью 13. Гидродвигатель 6 начинает движение. При наличии инерционной нагрузки перепад давлений в полостях 7 и 8 зависит от ее массы и ускорения и вызывает пропорциональное перемещение плунжеров Н. При изменении ускорения нагрузки плунжеры 11 и поршень 10 перемещаются с некоторой скоростью: расход, создаваемый последним, вычитается из расходе® через зазоры гидрораспределителя 2. Бла даря изменению проводимости окон 4 по ходу плунжера 5, этот плунжер отслеживает величину разности расходов гйдрорас«ределитбля 2 и поршня 10; емеше яе золотников 14 от их исходных положений определяется |эаз остыо входного сигнала н корректирующего сигнала, пропорпиойальйого
производной от перепада давлений в полостях 7 и 8.
Поскольку каждый из золотников 14 Может быть установлен регулировкой его упоров 15 с любым по величине и знаку начальным перекрытием своей дросселирующей кромки, в приводе возможно осуществление любой комбинации подключения полостей 7 и 8 к магистралям 12 и 13 по ходу плунжера 5. Этим обеспечивается щнрокий выбор конфигураций статических характеристик гндрораспределителя 3, которые могут быть подобраны оптимальными с точки получения максимальных точности и устойчивости привода.
Формула изобретения
Электрогидравлический привод, содержащий электромеханический преобразователь, гидрораспределитель «сопло-заслонка, управляющий гидрораспределитель с обратной связью по положению его плунжера, гидродвигатель с рабочими полостями, гидромеханическое корректирующее устройство и s магистрали нагнетания и слнва, отличающийся тем, что, с целью повышения точности н устойчивости, управляющий гидрораспределитель выполнен в виде четырех однокромочных цилиндрических золотников, каждый из которых подсоединен к одной из рабочих полостей гидродвигателя и к одной из магистралей, а плунжер снабжен регулируемыми упорами для взаимодействия с золотниками.
Источники информации, принятые во вни мание при экспертизе:
. Авторское свидетельство СССР № 283759, кл. F 15 В 9/06, 1969.
2. Авторское свидетельство СССР М 382855, кл. F 15 В 9/02, 1971.
W
ts
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод | 1979 |
|
SU808713A1 |
| АВТОНОМНЫЙ РУЛЕВОЙ ГИДРОПРИВОД | 1982 |
|
SU1128493A1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| Гидропривод | 1981 |
|
SU964275A1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909360A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2308619C2 |
| Гидропривод | 1982 |
|
SU1060820A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ДРОССЕЛЬНОГО | 1972 |
|
SU335453A1 |
| Электрогидравлический привод | 1979 |
|
SU922342A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |