1
Изобретение относится к силовому прийоду и предназначено для использования в дорожных, транспортных и строительных машинах, станках, манипуляторах, подъемных машинах, на судах и летательных аппаратах.
Известен электрогидравлический привод с обратной связью по скорости, содержащий магистрали слива и нагнетания, дросселирующий золотник с управляющими камерами, гидродвигатель и, кинематически связанный с ним, объемный насос, рабочие полости которого через соединительные гидролинии сообщены с управляющими камерами золотника 1.
Недостатком известного привода является то, что он не обеспечивает демпфирование инерционнойНагрузки из-за отсутствия корректирующей обратной связи.
Цель -изобретения - демпфирование инерционной нагрузки гидродвигателя.
Поставленная цель достигается тем, что в устройстве соединительные гидролинии снабжены нерегулируемыми дросселями, а рабочие полости объемного насоса шунтированы инерционным гидросопротивлением, при этом последнее может быть выполнено
в виде канала между рабочими полостями объемного насоса.
Кроме того, с целью повышения температурной стабильности, магистраль нагнетания подключена к средней части какала.
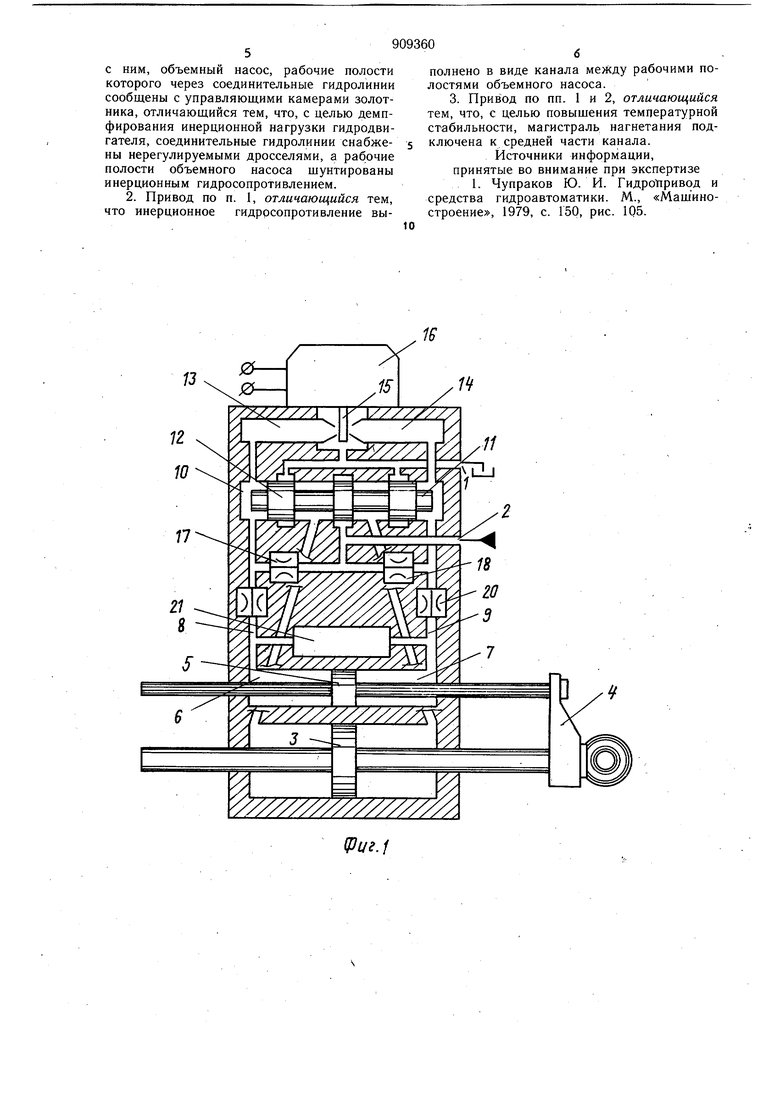
На фиг. 1 представлена принципиальная схема привода; на фиг. 2 - то же, один из вариантов подключения инерционного гидросопротивления.
Привод содержит магистрали 1 и 2, соответственно слива и нагнетания, гидро10двигатель 3 и кинематически связанный с ним, например, через траверсу 4, объемный насос 5, рабочие полости 6 и 7 которого через соединительные гидролинии 8 и 9 сообщены с управляющими камерами 10 15 и 11 дросселирующего золотника 12. Управляющие камеры 10 и 11 соединены с соплами 13 и 14, образующими с заслонкой 15 электромеханического преобразователя 16 регулируемые дроссели. Управляющие камеры 10 и 11 (фиг. 1) соединены через лансные дроссели 17 и 18 с магистралью 2 нагнетания. Соединительные гидролинии 8 и 9 в обоих вариантах привода снабжены нерегулируемыми дросселями 19 и 20, а рабочие полости 6 и 7 объемного насоса 5 шунтированы инерционным гидросопротивлением 21, содержащим инерционное рабочее тело. В варианте привода (фиг. 2) инерционное сопротивление 21 выполнено в виде канала 22 между рабочими полостями 6 и 7, инерционным телом в нем является рабочая жидкость гидропривода. Магистраль 2 нагнетания в приводе (фиг. 2) подведена к средней части канала 22. Привод (фиг. 1) работает следующим образом. При движении гидродвигателя 3 с неизменной скоростью расход, создаваемый объемным насосом 5, пропорционален скорости и не изменяется. Этот расход, протекая через инерционное - гидросопротивление 21, создает на нем неизменный перепад , давлений, также зависящий от скорости гидродвигателя 3. Вызванный этим перепадом давлений расход через нерегулируемые дроссели 19 и 20 алгебраически суммируется с протекающими через балансные дроссели 17 и 18 расходами и поступает в управляющие камеры 10 и 11 дросселирующего золотника 12. Слив из управляющих камер 10 и 11 зависит от положения заслонки 15 относительно сопел 13 и 14. При отсутствии входного сигнала на электромеханическом преобразователе 16 заслонка 15 находится в нейтральном положении и разность расходоз через сопла 13 и 14 отсутствует. Расход в соединительных гидролиниях 8 и 9 при движении.гидродвигателя 3, например, вправо, вызывает при этом движение дросселирующего золотника 12 влево. Скорость гидродвигателя 3 уменьшается до нуля, так как в этом случае расход через нерегулируемые дроссели 19 и 20 прекращается. Если заслонка 15 под действием входного сигнала на электромеханическом преобразователе 16 отклонена, например, влево, разность расходов в соплах 13 и 14 и в управляющих камерах 10 и 11 направлена вправо, дросселируюуций золотник 12 смещается вправо, вызывая движение гидродвигателя 3 также вправо. При некоторой скорости гидродвигателя 3 расход,.создаваемый объемным насосом 5 в соединительных гидролиниях 8 и 9, возрастает до величины указанной разности расходов в соплах 13 и 14. Дросселирующий золотник 12 останавливается. Если же скорость гидродвигателя 3, например, уменьшается под действием внешней нагр.узки, уменьшается и расход в соединительных гидролиниях 8 и 9, так как он меньше разности расходов через сопла 13 и 14, золотник 12 перемещается вправо, увеличив этим CKOpoqTb гидродвигателя 3. Аналогично, скорость гидродвигателя 3 будет отслеживать разность расходов через сопла 13 и 14 при других сочетаниях знаков входного сигнала и нагрузок. При равноускоренном движении гидродвигателя 3 расход, создаваемый объемным насосом 5, равномерно возрастает или уменьшается. При этом, благодаря необходимости перемещения инерционного тела в гидросопротивлении 21, на концах последнего появляется составляющая перепада давлений, пропорциональная ускорению расхода объемного насоса 5, а следовательно , и ускорению гидродвигателя 3. Соответственно, в управляющих камерах 10 и И дросселирующего золотника 12 появляется составляющая расхода обратной связи, пропорциональная ускорению гидродвигателя 3. Например, при разгоне гидродвигателя 3 вправо давление в рабочей полости 7 возрастает и имеет составляющую, пропорциональную ускорению. Дросселирующий золотник 12 под действием соответствующего увеличения расхода в соединительной гидролинии 9 смещается влево, уменьшая тем самым ускорение гидродвигателя 3. Аналогично инерционное гидросопротивление 21 обеспечивает ограничение ускорения гидродвигателя 3 по абсолютной величине и при других сочетаниях знаков скорости и ее изменения. Привод (фиг. 2) имеет в работе следующие отличие от вышеописанного. Через половины инерционного гидросопротивления 21, выполненного в виде канала 22, постоянно протекают расходы питания сопел 13 и 14, эти расходы можно считать постоянными и равными между собой, При неизменной скорости гидродвигателя 3 давления в рабочих полостях 6 и 7 объемного насоса 5 равны между собой, при постоянной скорости перепад давлений в рабочих полостях 6 и 7 пропорционален этой скорости, а при изменении скорости - так же, как и приводе на фиг. 1, имеет составляющую, пропорциональную ускорению. Поэтому и в соединительных гидролиниях 8 и 9 также наблюдается составляющая, пропорциональная скорости, и составляющая, пропорциональная ускорению гидродвигателя 3. В остальном принцип действия привода подобен описанному выше. Использование гидравлического инер ционного сопротивления для демпфирования инерционной нагрузки позволяет применять для управления массивными рабочими органами машин и механизмов надежные гидроприводы, легко унифицирующиеся с известными приводами. Кроме того, подключение магистрали питания к средней части канала позволяет получить стабильные по температуре характеристики привода, так как при использовании проточного канала его гидросопротивление стабилизируется благодаря турбулизации потока. Формула изобретения I. Электрогидравлический привод с обратной связью по скорости содержащий магистрали слива и нагнетания, дросселирующий золотник с управляющими камерами, гидродвигатель и,кинематически связанный с ним, объемный насос, рабочие полости которого через соединительные гидролинии сообщены с управляющими камерами золотника, отличающийся тем, что, с целью демпфирования инерционной нагрузки гидродвигателя, соединительные гидролинии снабжены нерегулируемыми дросселями, а рабочие полости объемного насоса щунтированы инерционным гидросопротивлением. 2. Привод по п. 1, отличающийся тем, что инерционное гидррсопротивление выполнено в виде канала между рабочими полостями объемного насоса. 3. Привод по пп. 1 и 2, отличающийся тем, что, с целью повыщения температурной стабильности, магистраль нагнетания подключена к средней части канала. Источники информации, принятые во внимание при экспертизе 1. Чупраков Ю. И. Гидропривод и средства гидроавтоматики. М., «Мащиностроение, 1979, с. 150, рис. 105.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1982 |
|
SU1060821A1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU903585A1 |
| Гидропривод | 1982 |
|
SU1060820A2 |
| Гидропривод | 1982 |
|
SU1062435A1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909359A1 |
| Гидропривод | 1988 |
|
SU1508014A1 |
| Электрогидравлический привод дроссельного регулирования | 1977 |
|
SU718633A1 |
| Гидравлический привод | 1981 |
|
SU1023152A1 |
| Электрогидравлический привод | 1979 |
|
SU808713A1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |

01
/ЛТУ77777////////Х
„ /////// ////////А
(Риг.1
13
1
/
Л ..f///.,
0
. Z
