Изобретение относится к шестикомпонентным аэродинамическим весам для вертикальной трубы, снабжённым автоматическими весами для измерения нагрузок на модель самолёта.
Сущность изобретения заключается В том, что, с целью возможно более полного устранения влияния потока воздуха на стержни, передающие усилия весовым измерителям нагрузок, при.менены защитные кожухи, охватывающие эти стержни. Эти кожухи выполнены обтекаемой формы в местах «х расположения в потоке и круглой там, где они поворотно укреплены на общей несущей их раме, поворотной, в свою очередь, вокруг продольной горизонтальпой оси.
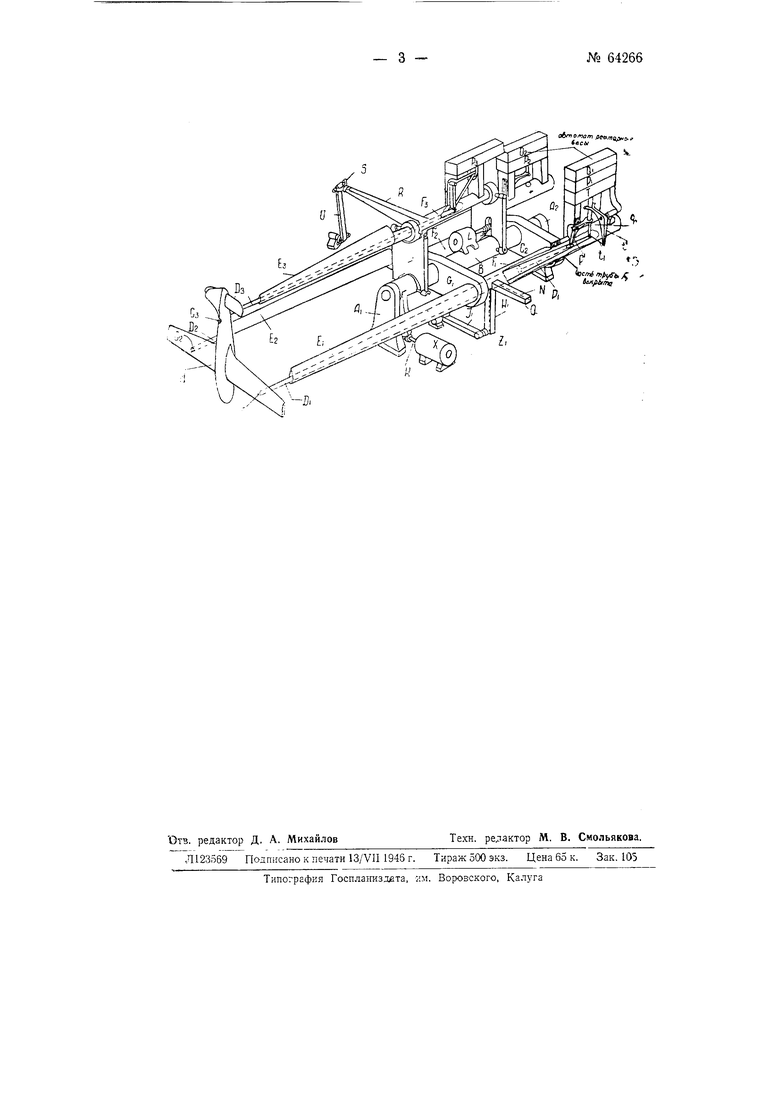
На чертеже предлагаемые щестикомпонентные весы изображены в перспективе.
На двух мощных подщипниках AI . и А2 смонтирован жёсткий вал В. Этот вал несёт на себе все измерительные элементы весов, устроенные таким образом, что при изменении углов атаки и углов скоса собственно динамометры (автоматические рейтериые весы) совместно с обтекателями осуществляют поступательные движения, а три штанги, на которых монтируется модель, защищённые кожухами обтекаемой формы, всегда становящимися по потоку, передают силы к весовым элементам, что более подробно явствует из последующего описания.
Модель М снабжена тремя универсальными щарнирами Ci, Со, Сз. Три жёсткие стержня Дь Дз, Дз несут модель на указанных щарнирах С|, С2, Сз и проходят внутри кожухов Ei, Ео, ЕЗ обтекаемой формы, которые вне пределов потока развиваются в трубы Fi, р2 и РЗ.
Трубы FI и р2 плотно, без люфта, могут вращаться в отверстиях траверс GI и G.-2 и, кроме того, снабжены звеньями - псводкамИ Hi и Н2 (Н2 не виден на чертеже), которые шарнирно связаны с звеньями - щатунами Ь и Ь (на чертеже не изображено) так, чтобы при изменениях угла скоса с помощью электромотора X и червячной пары К эти трубы, а, стало быть, и все соединённые с ними детали, двигались поступательно.
Стержень Di проходит внутри кожуха EI и трубы FI. Поводок Ht
сделан полым и внутри его размещается тяга Zi соединённая с торцом поводка HI и со стержнем DI шарнирами ЦАМа. Точно таким же образом стержень Di удерживается в горизонтальном направлении (в вертикальной плоскости) с помощью тяги N, : смонтированной внутри отростка О на трубе FI. . Крайний конец стержня Di подвешен с помощью тяги qi, к весовому элементу Qi. Далее, с помощью тяги р1 и качалки р , стержень DI уравновешивается весами PI, при действии продольных по оси сил.
Наконец, ещё одна система тяги ti и качалки f соединяет стержень DI с весовым элементом Т.
Весовые элементы Qi, Pi и Т со всеми тягами и качалками смонтированы в системе трубы Pl и совершают вместе с ней поступательное движение при вращении вала В и, стало быть, при изменении угла.
Совершено так же устроена система стержня Dg с измерительными элементами -Q2 и Р2. Здесь отсутствуют только связь типа N и весовой элемент Т.
Стержень Оз соединён только с одним ве-совым элементом, смонтированным на трубе РЗ; но здесь труба РЗ несёт на себе поводок R. снабжённый универсальным шарниром S и связанный, в свою очередь, с шатуном и таким образом, что при изменениях как угла скоса от электромотора X, так и угла атаки от электромотора L, система трубы РЗ движется только поступательно, а элемент РЗ измеряет осевую силу на стержне Оз.
Таким образом измеряются все шесть компонентов с очевидно простыми рабочими формулами. Весы по такой схеме могут быть смонтированы на катучей тележке, а отсчёты могут быть автоматизированы, вплоть до их печатания на бумаге на центральном пульте.
Ради ясности эскизного чертежа взаимное расположение деталей
схемы искажено. Искажены также и относительные размеры.
Предмет изобретения
1.Шестикомпонентные аэродинамические весы для вертикальной трубы с применением автоматических весов для измерения нагрузок на модель самолёта, о т л и ч а ющ и ее я тем, что, с целью возможно более полного устранения влияния потока воздуха на стержни DI, D-2, Оз, передающие весовым из.мерителям нагрузки, применены охватываюшие их зашитные кожух к. Ei, 2, ЕЗ обтекаемой формы в местах их расположения в потоке и круглой там, где они поворотно укреплены на обшей несущей их раме, поворотной, в свою очередь, вокруг продольной горизонтальной оси.
2.Форма выполнения аэродинамических весов по п. 1, отличающа яс я тем, что весовые измерители нагрузок укреплены на стержнях DI, Da, Da.
3.В аэродинамических весах по п. п. 1,2 применение звеньев Ь, Hi, образующих вместе с траверсой Gi рамы шарнирный параллелограм, звено HI которого, жёстко скреплённое с защитным кожухом EI, перемещается при этом поступательно (параллельно самому себе), принуждая к такому же движению и упомянутый кожух в том случае, когда рама принудительно поворачивается вспомогательным мотором X для изменения угла скоса модели самолёта.
4.В аэродинамических весах по п. п. 1, 2, 3 применение кинематической передачи U, R, звено R которой, с одной стороны, жёстко скреплённое с защитным кожухом ЕЗ и с другой связанное универсальlibi.M шарниром S со звеном U, служит для сообщения поступательноIO движения обтекаемому защитному кожуху ЕЗ при повороте поддерживающих его звеньев вспомогательным мотором L при изменении угла атаки испытуемой -моделиса.молёта.
апат неаацак, ,
IV

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОВОЛОЧНАЯ ПОДВЕСКА АЭРОДИНАМИЧЕСКИХ ВЕСОВ | 1968 |
|
SU231856A1 |
| Крупноразмерная аэродинамическая модель | 2015 |
|
RU2607675C1 |
| Лопасть несущего винта вертолета | 2017 |
|
RU2662591C1 |
| Устройство для измерения аэродинамических параметров летательного аппарата с машущими крыльями | 2024 |
|
RU2837120C1 |
| СПОСОБ ОЦЕНКИ ПРОМЫШЛЕННОЙ БЕЗОПАСНОСТИ ДЫМОВЫХ И ВЕНТИЛЯЦИОННЫХ ПРОМЫШЛЕННЫХ ТРУБ (ВАРИАНТЫ) | 2004 |
|
RU2254427C1 |
| Колокольная мельница | 1926 |
|
SU41987A1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2561829C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |