Изобретение относится к области приборов, обеспечивающих заданную характеристику пневматических исполнительных устройств. Известны позиционеры двустороннего действия, содержащие установленный в корпусе распределительный золотник с выходными каналами, каналами питания и слива, и кинематически связанный с ним чувствительный элемент, полость которого подключена к входному каналу, и датчик обратной связи, кинематически связанный с мембранным элементом 1, 2. Такие позиционеры мало чувствительны к колебаниям давления питания. Однако им присущи недостатки, наиболее серьезным из которых является то, что перепад давления на чувствительном элементе исполнительного механизма, создаваемый позиционером, зависит от хода золотника распределителя, который, в свою очередь, зависит от величины изменения командного давления во входном канале. Поскольку ход золотника в таких распределителях сравнительно велик, то и для получения большого перепада на чувствите..-1ьномэлементе исполни тельного механизма требуется большое из мененте величины командного давления то есть фактическая чувствительность таких позиционеров низка. Вследствие этого диапазон изменения сигнала управления уменьшается, а надежность гюзиционера снижается. Целью изобретения является повышение надежности позиционера двустороннего действия и расширение диапазона сигнала управления. Поставленная цель достигается тем, что в нем установлен управляемый дроссель, а в корпусе между чувствительным и мембранным элементами выполнена полость с дроссельным отверстием, соединенная через управляемый дроссель, кинематически связанный с мембранным элементбм, с каналом питания н через дроссельное, отверстие с атмосферой. Такой позиционер нечувствителен к изменению давления питания в широком диапазоне, так как величина давления в полости, образованной чувствительными элементами и корпусом позиционера, зависит только от усилия пружины обратной связи. Кроме того, чувствительный элемент, воспринимающий усилие командного давления.
находится избыточным давлением в одной из иодостей только при переходном режиме. При установивнгемся режиме давление в обоих полостях одинаково, а мембранный элемент обратной связи находится под избыточным давлением, равным давлению во входном канале, которое значительно меньше давления нитания, и имеет чрезвычайно малый ход.
В указанных условиях чувствительные элементы имеют достаточно высокие показатели надежности, что сказывается на надежности веего позиционера в Д1елом.
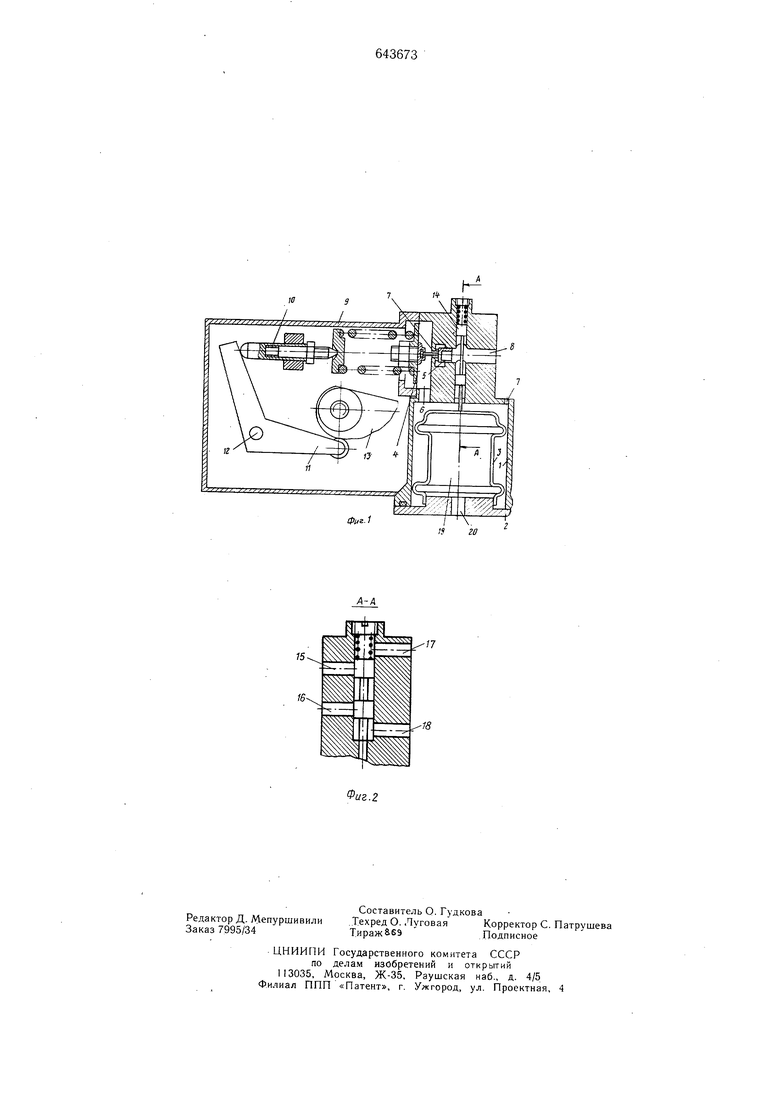
Продольный разрез позиционера двустороннего действия схе.матически изображен на чертеже фиг. 1. На чертеже фиг. 2 изображен разрез по А-А фиг . 1.
Позиционер состоит из корпуса 1, крышки 2, к которой ириварен чувствительный элемент - сильфои 3, .мембранного эле.мента 4ишарнирно связанного с ним управляемого дросселя 3. Мембранный элемент 4 образует вместе с еильфоном 3 и корпусом 1 полость 6, связанную с атмосферой дроссельным отверстием 7 и через управляемый дроссель 5 с каналом питания 8.
Па элемент 4 воздействует усилие пружины 9 обратной связи, изменяемое толкателем 10, перемещающимся в направляющей и контактирующим с одним нлечом рычага 11, поворачивающегося вокруг оси 12, другим концо.м рычаг 11 контактирует с датчиком 13 обратной связи, связанным с чувствительным злементо.м нневматического исполнительного механизма, который на чертеже не ноказан.
Сильфон 3 контактирует с распределительным золотником 14. В золотнике выполнены выходные каналы 15 и 16, связывающие его с нолостями пневматического исполнительного механизма, каналы слива 17 и 18, связанные с ат.мосферой, и канал питания 8. Полость 19 чувствительного элемента 3 соединена с входным канало.м 20 командного давления.
Действие позиционера основано на принципе равенства давлений. На сильфон 3 действует, с одной стороны, усилие от комар)дного давления, создавае.мого в полости 19, е другой стороны, усилие от давления, поддерживаемого в полости 6 элементо.м 4 е номощью дросселя 5. Последнее однозначно определяется ноложением датчика обратной связи 13.
Таким образом, каждому положению мембранного элемента 4 исполнительного механизма соответствует строго онределенное давление в полости 6.
В установившемся режиме, когда давление в полости 6 равно давлению в плоети 19,
то есть командному, распределите.чьныи золотник отсоединяет как каналы 15, 16, так и каналы 17 и 18 от канала питания 8. При изменении командного давления,
например увеличении, равенство давлений нарушается и появляется сила, действующая в направлении образовавшегося перепада, в данном примере - вверх.
Сильфон 3 начнет разжиматься; неремещая вверх распределительный золотник 14, при этом воздух через канал 8 и канал 15 поступает в полость исполнительного мехапиз.ма, а через каналы 16 и 17 сбрасывается из другой полости исполнительного .механизма на слив. Исполнительный механизм
начнет перемеихаться в сторону образовавщегоея перенада давлений, поворачивая при этом датчик 13 который в свою очередь, через рычаг 11 перемещает толкатель 10, увеличивая тем самым усилие пружины 9 и перемещая управляемый дроссель 5. В результате давление в полости 6 будет увеличиваться, причем до тех пор, пока это давление не сравняется с давлением в полости 19, после чего распределительный золотник 14 вернется в исходное положение.
Аналогично работает позиционер и при уменьщении командного давления. Техникоэкономический эффект предложения заключается в повышении надежности позиционера.
Формула изобретения
Позиционер двустороннего действия, содержащий установленный в корпусе распределительный золотник с выходными каналами и каналами питания и слива, кинематически связанный с ним чувствительный элемент, полость которого подключена к входно.му каналу, и датчик обратной связи, кинематически связанный с .мембранным элементом, отличающийся тем, что, с целью повышения надежности позиционера и расширения диапазона сигнала управления, в нем установлен унравляемый дроссель, а в корнусе между чувствительны.м и ме.мбранным элемента.ми выполнена полость с дроссельным отверстием, соединенная через управляемый дроссель, кинематически связанный с мембранным элементом, с каналом питания и через дроссельное отверстие е атмосферой.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 177677, кл. F 16 В 15/02, 1959.
2.Авторское свидетельство СССР № 225652, кл. F 15 В 15/02, 1967.
IS го
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования давления | 1977 |
|
SU691811A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2209990C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2194178C1 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА | 1984 |
|
SU1228395A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| Система стабилизации скорости самоходной машины | 1983 |
|
SU1100158A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
«
