Изобретение относится к области авиации, а именно к бустерным необратимым системам управления самолетов.
Целью изобретения является расширение функциональных возможностей гидропривода путем обеспечения независимого управления от летчика и автоматических устройств.
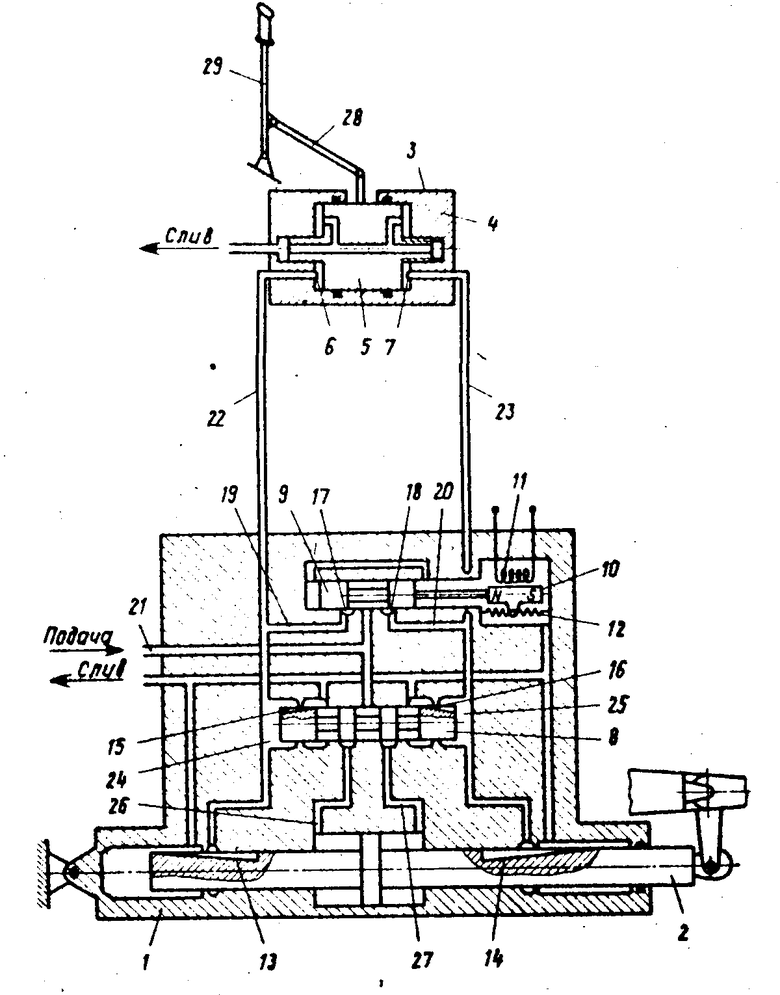
На чертеже схематично показан описываемый гидропривод.
Следящий гидропривод содержит исполнительный привод, состоящий из корпуса с силовым цилиндром 1 и штока 2 с поршнем, а также управляющее устройство привода, имеющее командное устройство 3, содержащее корпус 4, заслонку 5 и два сопла, образующих совместно с заслонкой два струйных дросселя 6 и 7 переменного сопротивления. Гидропривод также содержит золотник 8 управления, дроссельный золотниковый клапан 9 с двумя рабочими кромками, соединенный с электромеханическим преобразователем, состоящим из якоря 10, обмотки 11 управления и центрирующей пружины 12. На штоке 2 и золотнике 8 выполнены клиновидные прорези, которые совместно с проточками в корпусе привода образуют дроссели 13-16 переменного сечения. Рабочие кромки золотникового клапана с проточками в цилиндре 1 также образуют два дросселя 17 и 18 переменного сечения.
Перечисленные четыре пары регулируемых дросселей, соединенные каналами 19-23, образуют управляющее устройство привода, выполненное по схеме гидравлического моста ромбовидного соединения регулируемых гидравлических сопротивлений, в одну из диагоналей которого включается источник питания, а в другую измерительную нагрузка. Нагрузкой данного моста является золотник 8, полости 24 и 25 перед торцами которого соединены с каналами 22 и 23. Полости цилиндра 1 соединены с золотником 8 каналами 26 и 27. Командное устройство 3 связано тягой 28 с рычагом 29 управления. Дроссели 17 и 18 соединяют измерительную диагональ через канал 21 с линией подачи, а дроссели 6 и 7, 13-16 с линией слива. Элементы, изменяющие проходные сечения каждой пары дросселей, жестко связаны между собой и образуют четыре механических входа управляющего устройства: два командных, связанных с рычагом 29 управления и с якорем 10 электромеханического преобразователя, и два обратной связи, связанных со штоком 2 и золотником 8.
Следящий гидропривод работает следующим образом.
Поток рабочей жидкости из линии подачи через канал 21 подводится к дросселям 17 и 18, дросселируется, проходя через них, и попадает в каналы 22 и 23 диагонали моста. Из этих каналов через дроссели 6, 7, 13-16 поток поступает в линию слива. Давления в каналах 22 и 23 являются функциями соотношения гидравлических сопротивлений указанных дросселей.
При отсутствии электрических входных сигналов, нейтральном положении рычага 29 управления, штока 2 привода и золотника 8 управления сечения, а следовательно, гидравлические сопротивления всех четырех пар дросселей в обоих плечах моста одинаковы, поэтому давление в полостях 24 и 25 одинаково, золотник 8 неподвижен, его пояски перекрывают каналы 26 и 27, шток 2 также неподвижен. При перемещении рычага 29 управления заслонка 5, проворачиваясь в резьбовом отверстии корпуса 4, смещается, например, к правому (по чертежу) соплу дросселя 7. При этом нарушается равновесие гидравлических сопротивлений дросселей 6 и 7 и появляется разбаланс моста. В полости 25 давление повышается, а в полости 24 понижается. Под действием этого перепада давлений золотник 8 начинает смещаться влево, соединяя левую полость силового цилиндра с линией нагнетания, а правую со сливом. При смещении золотника уменьшается гидравлическое сопротивление дросселя 16, понижая давление в полости 25, и увеличивается сопротивление дросселя 15, повышая давление в полости 24. Золотник останавливается в тот момент, когда давление в полостях 24 и 25 выравнивается. Таким образом, золотник с дросселями 15 и 16, смещаясь в сторону канала с меньшим давлением, постоянно поддерживает сбалансированное состояние гидравлического моста. Вследствие того, что золотник сместился влево, шток 2 исполнительного привода начинает двигаться вправо (по чертежу), что приводит к увеличению сопротивления дросселя 13 и уменьшению сопротивления дросселя 14. Появляется разбаланс моста, при котором давление повышается в полости 24, а в полости 25 понижается, золотник смещается к нейтральному положению, обеспечивая балансировку моста. Движение штока будет продолжаться до тех пор, пока гидравлический мост будет сбалансированным при нейтральном положении золотника, т.е. когда разность сопротивлений дросселей 6 и 7 компенсируется разностью сопротивлений дросселей 13 и 14 противоположного знака. Таким образом, обеспечивается перемещение штока привода, пропорциональное перемещению рычага управления.
При неподвижном рычаге 29 управления и подаче на обмотку 11 управления электрического сигнала якорь 10 перемещает золотниковый клапан 9 на величину, пропорциональную току управления. При этом нарушается равновесие гидравлических сопротивлений дросселей 17 и 18 и шток перемещается описанным способом вправо в положение, при котором разность сопротивления дросселей 17 и 18 компенсируется разностью сопротивлений дросселей 13 и 14 противоположного знака.
При одновременном независимом перемещении рычага 29 и подаче управляющего сигнала на обмотку 11 и шток 2 перемещается на величину, пропорциональную алгебраической сумме этих входных воздействий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННОМ ДВИГАТЕЛЕ | 2001 |
|
RU2198312C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1973 |
|
SU1840517A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Гидравлический привод | 1989 |
|
SU1672010A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД ДЛЯ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1984 |
|
SU1840015A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| АВТОНОМНЫЙ РУЛЕВОЙ ГИДРОПРИВОД | 1982 |
|
SU1839926A1 |
СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА, содержащий исполнительный привод и управляющее устройство привода, выполненное по мостовой схеме с питающей и измерительной диагоналями и содержащее регулируемые дроссели, установленные попарно между распределительной диагональю моста и линией слива, элементы изменения проходных сечений которых образуют командный вход и два входа обратной связи, механически связанные соответственно с рычагом управления, штоком гидропривода и золотником, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения независимого управления от летчика и автоматических устройств, два дросселя, образующие пару, установленную между измерительной диагональю и линией подачи, выполнены регулируемыми, а элементы изменения их проходных сечений образуют дополнительный командный вход, механически связанный с электромеханическим преобразователем электрических сигналов.
СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА, содержащий исполнительный привод и управляющее устройство привода, выполненное по мостовой схеме с питающей и измерительной диагоналями и содержащее регулируемые дроссели, установленные попарно между распределительной диагональю моста и линией слива, элементы изменения проходных сечений которых образуют командный вход и два входа обратной связи, механически связанные соответственно с рычагом управления, штоком гидропривода и золотником, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения независимого управления от летчика и автоматических устройств, два дросселя, образующие пару, установленную между измерительной диагональю и линией подачи, выполнены регулируемыми, а элементы изменения их проходных сечений образуют дополнительный командный вход, механически связанный с электромеханическим преобразователем электрических сигналов.
| Патент США N 4152971, кл | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
