Уже известны планетарные редукторы для, винтов самолётов, заключающие в себе солнечное колесо, поводок с сателлитами и колесо с венцом внутреннего зацепления.
Для изменения направления вращения винтов самолётов подобные редукторы могут быть, однако, использованы лишь при их снабжении реверсивными механизмами, значительно усложняющими, утяжеляющими и удорожающими всю конструкцию редуктора.
Предлагаемый планетарный редуктор позволяет легко устанавливать требуемое направление вращения связанного с ним винта и имеет ту особенность, что для возможности вращения в разные стороны двух винтов самолёта отдельными вращающимися в одну сторону двигателями чере:$ посредство одинаковых комп.яектов колёс, втулки обоих колёс и поводка сателлитов насажены с возможностью их перестановки на три из четырёх ступиц, две из которых монтированы неподвижно, а две другие ступицы насажены соответственно на коленчатый вал и вал винта.
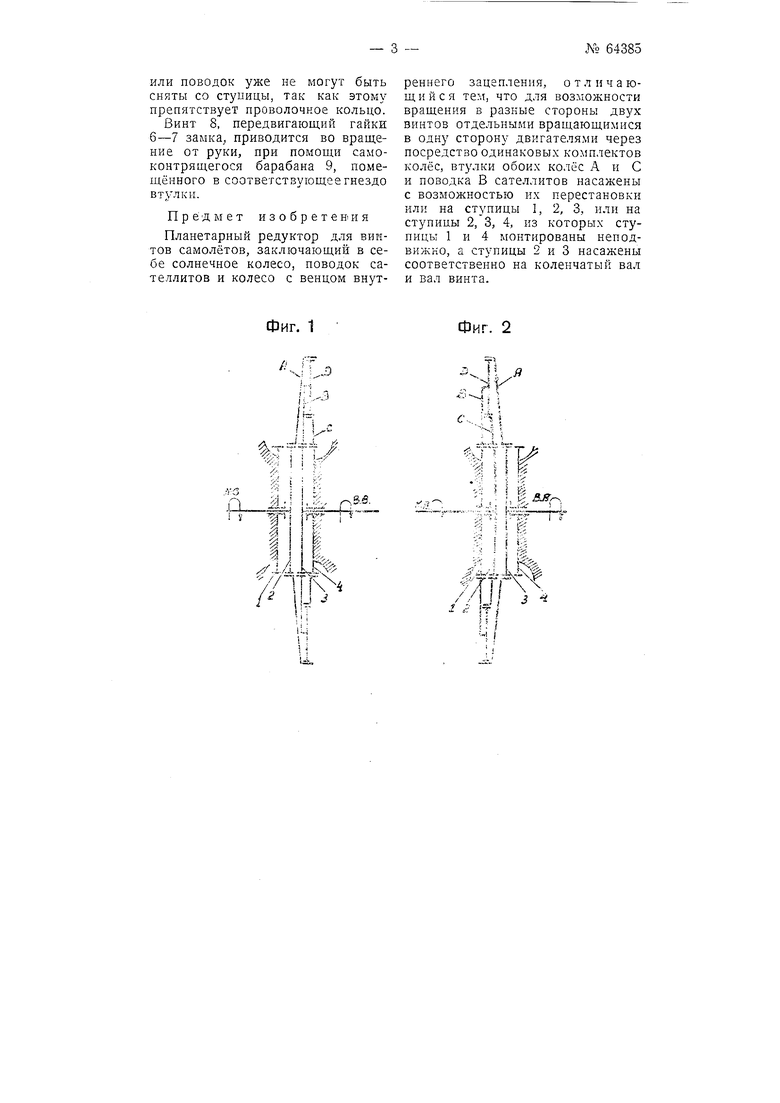
На чертеже фиг. 1 изображает схематически вид сбоку примерной формы выполнения планетарного
редуктора с расположением элементов редуктора для сообщения валу винта вращения в одном направлении, фиг. 2-схематический вид сбоку редуктора по фиг. 1, но с расположением его элементов для сообщения валу винта вращения в другом направлении, чем по фиг. 1, фиг. 3-поперечный разрез детали редуктора по фиг. 1-2, а фиг. 4-продольный разрез детали по фиг. 3.
Редуктор позволяет без переделки, т. е. без добавления какихлибо деталей, при помощи обычного, применяемого при эксплоатации инструмента, в течение небольщого промежутка времени по желанию, получить правое или левое направление вращения вала винта.
Применение в практике редуктора позволяет иметь двух- и многомоторные самолеты с полностью компенсированными реактивным и гироскопическим моментами винтов, обладающих отличными лётными качествами, без усложнения их эксплоатации (в смысле необходимости иметь на складах запасные моторы разного направления вращения).
В основу редуктора положен обычный планетарный редуктор
с цилиндрическими шестернями, схематически изображённый на фиг. 1. Колесо А с венцом внутреннего зацепления закреплено на коленчатом валу (К, В.) двигателя. Поводок В сателлитов D закреплён на валу винта (В. В.). Солнечное колесо С неподвижно и соединено с носком картера двигателя. Сателлиты D входят в зацепление с обоими колёсами А и С. При вращении коленчатого вала по часовой стрелке, колесо А катит по солнечному колесу С сателлиты D, увлекающие за собой вал винта, который вращается также по часовой стрелке.
Для изменения направления вращения вала винта в противоположную сторону схему ред ктора следует изменить так, как показано на фиг. 2. Колесо А с венцом внутреннего зацепления закреплено на валу винта, поводок В сателлитов D закреплён к картеру мотора (застопорен), а солнечное колесо С соединено с коленчатым валом двигателя. Сателлиты D, как и в схеме по фиг. 1, входят в зацепление с обоими колесами А и С.
При вращении коленчатого вала по часовой стрелке, колесо С будет вращать сателлиты D, а, следовательно, и колесо А, против часовой стрелки, причём винт будет вращаться также против часовой стрелки, т. е. будет иметь место полное реверсирование.
Но реверсивный редуктор, при перемене направления вращения, не должен изменять своего передаточного числа, т. е. должен сохранять число оборотов винта при правом и левом направлении вращения. Графически или аналитически легко можно доказать, что неизменное число оборотов для обоих направлений вращения имеет место в том случае, когда число зубцов солнечного колеса С составляет 61,8 % от числа зубцов колеса А с венцом внутреннего зацепления.
Для возможности перестановки втулок колёс А,С и поводка В сателлитов D применены четыре ступицы 1-4 одного диаметра, снабжённые по внешнему контуру системой щлицов (40-60 щтук). Ступица 1 закреплена на картере двигателя, ступица 2-на конце коленчатого вала (К. В.), ступица 3-на конце вала винта (В. В.) и ступица 4-на носке картера мотора.
Колесо А с зенцом внутреннего зацепления, солнечное колесо С с венцом внешнего зацепления и поводок В сателлитов D во втулках имеют внутренние шлицы, соответствующие шлицам на ступицах 1-4.
Таким образом любое из колес А,С и поводок В сателлитов D могут быть надеты поодиночке на любую из ступиц 1-4 для осуществления реверсирования редуктора. Для работы редуктора по схеме фиг. 1 колесо А надевается на ступицу 2, поводок В-на ступицу 3 и колесо С-на ступицу 4. Для работы редуктора по схеме фиг. 2, поводок В сателлитов D надевается на ступицу 1, колесо С-на ступицу 2 и колесо А-на ступицу 3. Для надёжного и простого закрепления колес и поводка сателлитов на ступицах применён замок, показанный на фиг. 3-4. Шлицы каждой из ступиц 1-4 по середине длины пересечены кольцевой канавкой; втулки колёс и поводка сателлитов также снабжеиы внутренней кольцевой канавкой, В канавке каждой из втулок помещена тонкая стальная проволока 5 в виде незамкнутого кольца, концы которого закреплены на двух гайках 6-7. Гайки сидят на винте 8, находящемся во втулке колеса или поводка сателлитов и имеющем две винтовые резьбы-правую и левую. При вращении винта 8 в одну сторону гайки 6-7 расходятся и раздвигают проволочное кольцо, увеличивая его диаметр. Проволока 5 при этом уходит полностью в канавку втулки и колесо или поводок легко могут быть сняты со ступицы.
При вращении винта 8 в другую сторону гайки 6-7 сходятся, стягивают концы проволоки 5, уменьшая диаметр проволочного кольца, причём оно плотно входит в кольцевую канавку ступицы. Колесо
или поводок уже не могут быть сняты со стуницы, так как этому препятствует проволочное кольцо. Винт 8, передвигающий гайки 6-7 замка,, приводится во вращение от руки, при помощи самоконтрящегося барабана 9, помещённого в соответствующее гнездо втулки.
Предмет изобретевия
Планетарный редуктор для винтов самолётов, заключающий в себе солнечное колесо, поводок сателлитов и колесо с венцом внутФиг. 1
/,
U..Л
i I , .X.,р
fTJ f|-1-v
I fc
I 11
1 I t-;,
Л Aim
- /
// v
реннего зацепления, отличающийся тем, что для возможности вращения в разные стороны двух винтов отдельными вращающимися в одну сторону двигателями через посредство одинаковых комплектов колёс, втулки обоих колёс А и С и поводка В сателлитов насажены с возможностью их перестановки или на ступицы 1, 2, 3, или на ступицы 2, 3, 4, из которых ступицы 1 и 4 монтированы неподвижно, а ступицы 2 и 3 насажены соответственно на коленчатый вал и вал винта.
Фиг. 2
,
1 .
| название | год | авторы | номер документа |
|---|---|---|---|
| Винт с автоматически изменяемым шпатом | 1943 |
|
SU64239A1 |
| Планетарная передача для вращения в противоположные стороны соосных воздушных винтов | 1943 |
|
SU63576A1 |
| Планетарный редуктор числа оборотов авиационного двигателя | 1948 |
|
SU74460A1 |
| Двускоростной редуктор соосных винтов | 1946 |
|
SU67729A1 |
| Редуктор для вращения в разные стороны двух соосно расположенных винтов | 1941 |
|
SU69046A1 |
| Двухскоростная передача для двух соосных винтов | 1945 |
|
SU67417A1 |
| Редуктор для соосных винтов | 1949 |
|
SU87574A1 |
| МЕЖОСЕВОЙ ДИФФЕРЕНЦИАЛ ПОЛНОПРИВОДНОГО АВТОМОБИЛЯ | 2011 |
|
RU2479443C2 |
| ДВУХСКОРОСТНАЯ ГЛАВНАЯ ПЕРЕДАЧА | 2010 |
|
RU2432267C1 |
| Планетарный редуктор с внутренним зацеплением | 2024 |
|
RU2839170C1 |

