Изобретение относится к области автоматизации передвижных технологических объектов и может быть использовано в коксохимической, металлургической и других отраслях промышленности.
Цель изобретения - повьшение функциональной надежности и упрощение устройства.
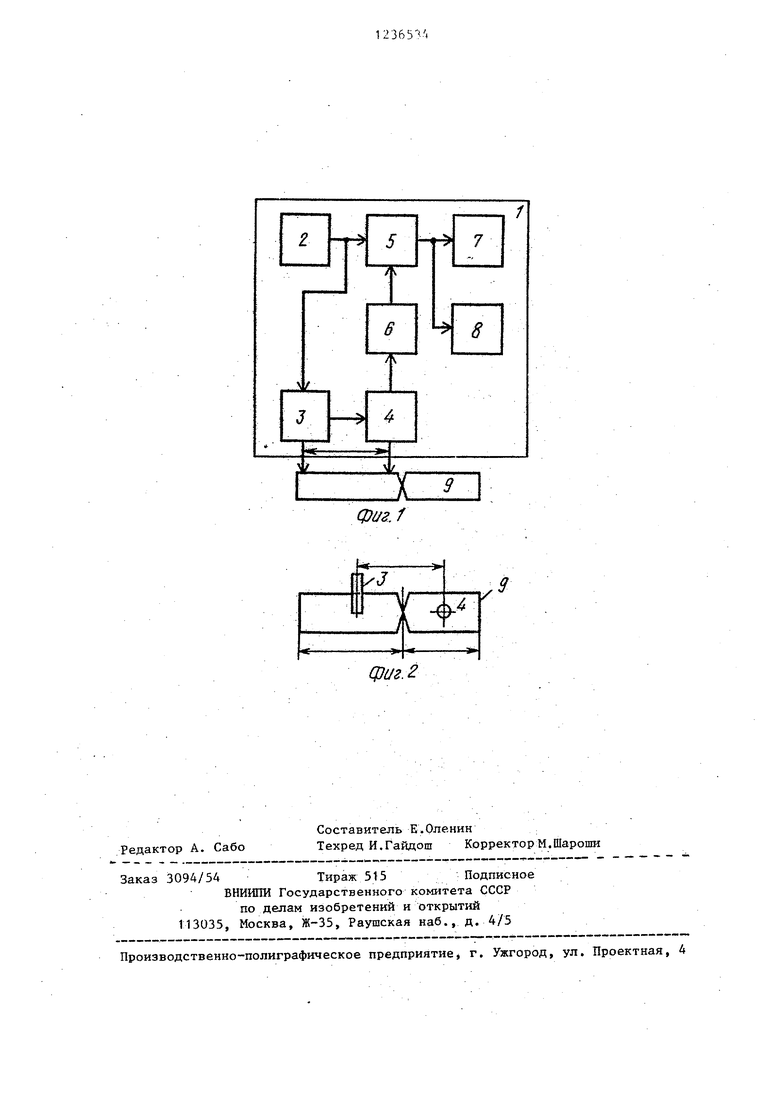
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - взаимное расположение антенн.
Устройство содержит на подвижном объекте 1 генератор 2 высокой частоты, передающую 3 и приемную 4 антенны, фазовьш детектор 5, усилитель 6, индикатор 7, исполнительный блок 8, приемопередающую антенну 9, продолженную вдоль пути передвижных линий подвижного объекта.
Устройство работает следующим образом.,
Сигнал с высокочастотного генератора 2 через передающую антенну 3 воспринимается приемопередакицей антенной 9. В точках перекрещивания двухпроводной линии антенны 9 происходит изменение фазы напряжения на 180. Далее сигнал воспринимается приемной антенной 4, усиливается усилителем 6 и подается на первый вход фазового детектора 5. Опорное напряжение непосредственно от генератора 2 высокой частоты подается на второй вход фазового детектора.
В зависимости от фазы и величины напряжения усилителя 6 на выходе фазового детектора 5 появляется напряжение соответствующей полярности, пропорциональное расстоянию отклонения от точки контроля, которое поступает в исполнительный блок 8 и на индикатор 7.
Взаимно перпендикулярное расположение передающей антенны 3 и приемной антенны 4 исключает их взаимное влияние. С целью исключения неоднозначного определения положения подвижного объекта 1 относительно точки контроля расстояния между указанными антеннами должно быть меньше зоны контроля и больше второй зоны.
Таким образом, при перемещении подвижного объекта 1 вдоль приемопередающей антенны 9 от первой зоны к второй зоне контроля передающая 3 и приемная 4 антенны сначала находятся
в первой зоне и фазы сигналов от генератора 2 высокой частоты и приемной антенны 4 совпадают. Затем при дальнейшем перемещении объекта 1 передающая антенна 3 продолжает находиться в первой зоне, а приемная антенна 4 перемещается во вторую зону, где фаза сигнала изменяется на 180°.
Далее при перемещении передающей антенны 3 во вторую зону приемная антенна 4 выходит за пределы антенны 9 за счет того, что расстояние меж- ДУ передающей и приемной антеннами больше длины второй зоны.
Формула-изобретения
Устройство для регулирования движения подвижного объекта, содержащее на подвижном объекте приемную антенну, выход которой соединен с входом усилителя, выход которого соединен
с первым входом фазового детектора, выход которого соединен с входами индикатора и исполнительного блока приемопередающую антенну, расположенную вдоль пути передвижения подвиж:ного объекта, генератор высокой частоты, плоскость приемной антенны перпендикулярна плоскости приемопередающей антенны, отличающееся тем, что, с целью повьш1ения
функциональной надежности и упрощения устройства, в него введена на подвижном объекте передающая антенна, приемопередающая антенна выполнена в Bi-вде двух короткозамкнутых
петель, соединенных между собой в точке контроля, а генератор высокой частоты установлен на подвижном объекте, выход генератора высокой частоты соединен с вторым входом
фазового детектора и входом передающей антенны, ось диаграммы направленности которой перпендикулярна оси диаграммы направленности приемной антенны, расположенной на расстоянии t от передающей антенны, длина од
ной петлр приемопередающей антенны больше t, а длина другой петли меньше Е, петли приемопередающей антенны расположены вдоль проекции оси диаграммы направленности передающей антенны на путь передвижения подвижного объекта.
фиг. /
фиг. 2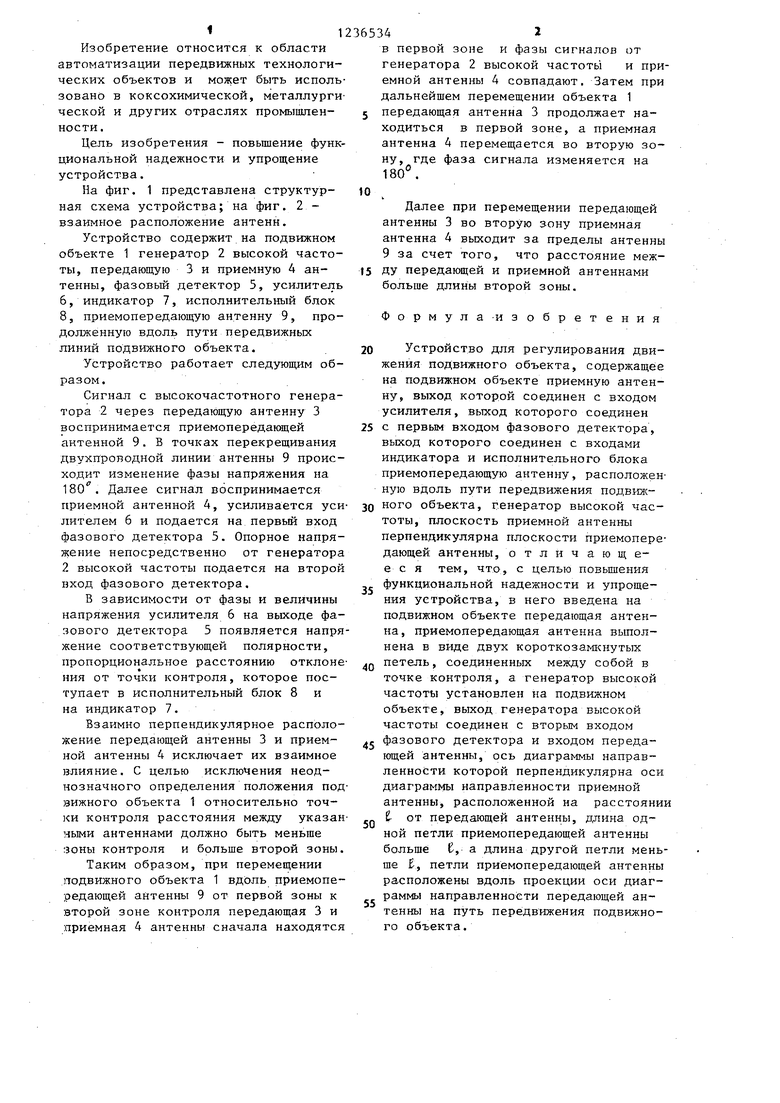
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2582068C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖИВОГО ОБЪЕКТА И МИКРОВОЛНОВЫЙ ЛОКАТОР ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2159942C1 |
| ФАЗОВАЯ РАДИОГЕОДЕЗИЧЕСКАЯ СИСТЕМА | 1991 |
|
RU2088948C1 |
| КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА | 2010 |
|
RU2446477C2 |
| СИСТЕМА РЕГИСТРАЦИИ И КОНТРОЛЯ РЕЙСОВ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2586860C2 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2457629C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2515191C2 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2264934C1 |
Изобретение относится к области автоматизации передвижных технологических объектов и может быть использовано в коксохимической, металлургической и других областях промышленности. Цель изобретения - повышение функциональной надежности и упрощение устройства. Цель достигается путем установки генератора высокой частоты на подвижном объекте и выполнения приемопередающей антенны в виде короткозамкнутых линий, разделенной точкой пересечения на две зоны, выбором длин этих зон во взаимосвязи с расстоянием между передающей и приемной антеннами и установкой этих антенн, исключаюа;ей влияние их друг на друга. 2 ил. (О (Л го со сп сд Од 
| Устройство для контроля направления движения подвижного механизма | 1976 |
|
SU649011A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Авторское свидетельство СССР № 612539, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
