1
Изобретение относится к устройствам для измерения вязкости жидких сред.
Известен ротационный вискозиметр для жидкостей, сопержаищй корпус с редуктором, стакан, содержащий контролируемую жидкость, и электромотор с промежуточным приводом, позволяющим регулировать число оборотов выхоного вала редуктора l.
Ротор вискозиметра размещен на конце выхоаного вала редуктора.
Известный ротационный вискозиметр содержащий коаксиальные цилиндры, од из которых соединен с приводным двигателем, а второй - с устройством для измерения момента, выполненным в ввде двухстепенного гироскопа , корпус которого соединен с измерительным цилиндром, причем входная ось гнроснопа совмещена с осью дращения измерительного цилиндра, а на выходной оси гироскопа установлен датчик угла, ротор которого электрически свя-
зан через усилитель с компенсирующим ав 1гателем, механически связанным с валом измерительного цилиицра {2J .
Известное устройство не позволяет с достаточной точностью расширить диапазон измерений .
Цель предлагаемого изобретения повышение точности измерений в широком диапазоне изменения вязкости.
Для этого в устройство дополнительно введен регулятор стабилизации скорости углового движения пирокамеры, состоящий из пфоскопического датчика угловой скорости, усилителя сигнала сравнения, электродвигателя, связанного через редуктор с поворотным корпусом, и генератора эталонного напряжения, подключенного ко второму входу усилителя, причем обмотка управления электродвигателя подключена к выходу усилителя.
На фиг. 1 дана киналапгческая схема предлагаемого вискозиметра;
на фиг. 2 и 3 - структурные схемы измерителя вязкости,
В гирокамере 1 установлен гиро- мотор 2, главная ось которого перпендикулярна продольной оси 3 гирокамеры 1. Гирюкамера 1 с помощыр папф и подшипников установлена в цилиндрическую полость поворютного корпуса 4, в зазоре между которыми помещена исследуемая жидкая среда 5. На опорах 6 внутри гирокамеры 1 установлен гироскопический датчик 7 угловых скоростей, ось чувствительности которого совпадает с осью 3 гирокамеры. На оси 8 установлен датчик 9 угла, выход которого связан электрически с входом 10 усилителя 11 . Выход усилителя соединен с управляющей обмоткой двигатля 12, в цепи которюй последовательно включен регистрирующий прибор 13. Двигатель 12 через редуктор 14 сообщает поворотному корпусу 4 вращательное движение относительно оси 15.
Генератор 16 эталонного напряжения подключен ко второму входу 17 усилителя 11. Датчик 18 температуры установлен внутри поворотного корпуса 4, Электромагнитный арретир 19 устано лен на торцовых поверхностях поворют- кого корпуса и гирюкамеры. На терцах поворотного корпуса установлены два штуцера 2О и 21.
Измеритель вязкости работает следующим образом.
Полость между гирокамерой 1 и поворютным корпусом 4 через вводный штуцер 20 заполняется исследуемой жидкостью 5, Вязкость жидкости измеряется в процессе движения гирокамеры под действием гироскопического момента, величина которого определяется по формуле
, Мг Н-ы(1)
где. Н - : кинетический момент ротора гироскопа;
04 - угловая скорость гирокамвры относительно вертикальной оси 15, создаваемая двигателем 12.
Уравнение для момента сил вязкости трения определяется вьфажением
da
(2) Мв-f,- ,
где f .. коэффициент сил вязкости трения;
а - угол поворюта гирокамеры по оси 3.
В установившемся движении . вымолняется следующее равенство
da
d-t
(3)
(4)
Из формулы (4) следует, что коэффициент сил вязкого тре1шя, а, следовательно, и вязкость жидкости прямо- прюпорционален угловой скорости врашения корпуса измерителя при условии
зт
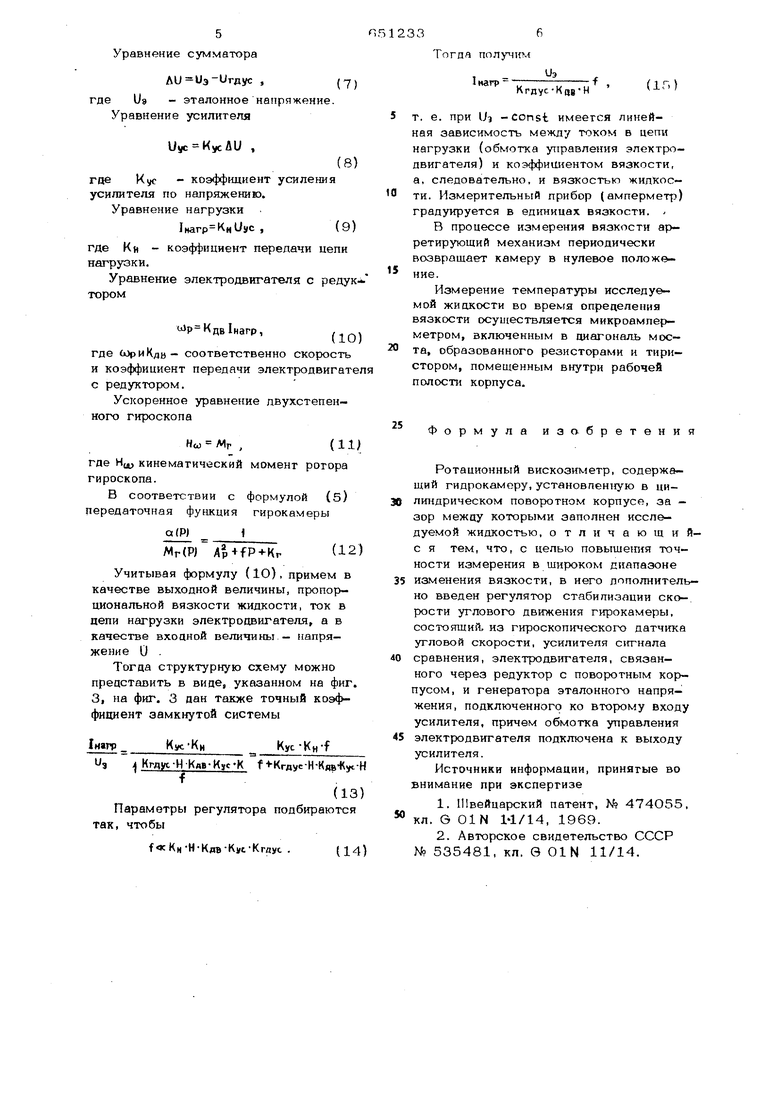
Стабилизация угловой скорости гирокамеры (dt ) осуществляется регуля- тором, состоящим из гироконического датчика угловых скоростей, усилителя и двигателя. Структурная схема регулятора совместно с гироскопом, гиро- камерой и исследуемой жидкостью
представлена на фиг. 2.
Угловая скорость движения гирю- камеры измеряется с помощью гирюскопического датчика угловых скоростей, сигнал с которюго сравнивается с эта;юнным напряжением Us , которюе подбирается«при калибровке прибора. Разностный сигнал усиливается в уси- лителе и затем поступает на обмотку управления двигателя 12, скорюсть вращения выходного вала которого пропорциональна току в обмотке управления.
Дифференциальное уравнения движения гирокамеры
da А-г f-- + Кга,
(5)
dt d-fc
где А - момент инерции гирюкамеры относительно оси 3;
f - коэффициент сил вязкости трения;
Кг- коэффициент упругих сил. Уравнение гироскопического датчика угловых скоростей (ГДУС), измеряющего угловую скорюсть
1/гдус Кгдуса,
(6)
где Upflyc - выходное напряжение ГДУС; Kr/v- коэффициент пропорциональносУравнение сумматора AU U3 Urflyc ,(7 где и - эталонное напряжение. Уравнение усилителя и, КусЛи гае Кус - коэффициент усиления усилителя по напряжению. Уравнение нагрузки 1нагр Книус,(9 где Ки - коэффициент передачи цепи нагрузки. Уравнение электродвигателя с реду тором Р Ндв1нагр, где (ОриКдв- соответственно скорость и коэффициент передачи электродвигат с редуктором. Ускоренное уравнение двухстепенного гироскопа /Иг ,(11 где Н(д, кинематический момент ротора гироскопа. В соответствии с формулой (S) передаточная функция гирокамеры а (Р)1 Мг(Р) Ap+fP+Kr(12 Учитывая формулу (1О), примем в качестве выходной величины, пропорциональной вязкости жидкости, ток в цепи нагрузки электродвигателя, а в качестве вхоциой величины - напряжение О . Тогда структурную схему можно представить в виде, указанном на фиг 3, на фиг. 3 дан также точный коэффициент замкнутой системы Кус-Кн-f Кгдус-Н Кдв-Иус-К f-t-Krflyc-H-KflB-Ky Параметры регулятора подбираютс так, чтобы f«KHНКдвКуьКгдус . (1 Тогда получим 1вагр Кгдус KjjgH т. е. при и -const имеется линейная зависимость между током в цепи нагрузки (обмотка управления электродвигателя) и ко; ффи11иентом вязкости, а, следовательно, и вязкостью жидкое- ти. Измерительный прибор (амперметр) градуируется в единицах вязкости. . В процессе измерения вязкости арретирующий механизм периодически возвращает камеру в нулевое положоние. Измерение температуры исследуемой жидкости во время определения вязкости осуи1ествляется микроамперметром, включенным в диагональ моста, образованного резисторами и тиристором, помещенным внутри рабочей полости корпуса. Формула изобретения Ротационный вискозиметр, содержащий гидрокамсру, установпенную в цилиндрическом поворютном корпусе, за - зор между которыми заполнен исследуемой жи1гкостъю, отличающий- с я тем, что, с целью повышеття точности измерения в широком диапазоне изменения вязкости, в него дополнительно введен регулятор стабилизации скорости углового движения гирокамеры, состоящий, из гироскопического датчика угловой скорости, усилителя сигнала сравнения, электродвигателя, связанного через редуктор с поворотным корпусом, и генератора эталонного напряжения, подключенного ко второму входу усилителя, причем обмотка управления электродвигателя подключена к выходу усилителя. Источники информации, принятые во внимание при экспертизе 1.Швейцарский патент, № 474О55, кл. G 01N М/14, 1969. 2.Авторское свидетельство СССР No 535481, кл. 0 01N 11/14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротационный вискозиметр | 1975 |
|
SU525871A1 |
| Устройство для измерения вязкости жидкости | 1980 |
|
SU898293A1 |
| Устройство для измерения вязкости жидкости | 1977 |
|
SU735968A1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| Вискозиметр | 1982 |
|
SU1030700A1 |
| Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором | 2019 |
|
RU2772568C2 |
| Устройство для определения вязкости жидкостей | 1975 |
|
SU535481A1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2017 |
|
RU2641018C1 |
| Ротационный вискозиметр | 1980 |
|
SU898294A1 |
| Устройство для измерения вязкости жидкости | 1978 |
|
SU771515A1 |

