Изобретение относится к измерительной технике, а именно к средствам измерения угловых скоростей в системах управления движущимися объектами, например к средствам измерения угловых скоростей ступеней ракет-носителей и космических объектов.
Безобогревные электромеханические поплавковые датчики угловых скоростей (ДУС) получили большое распространение в качестве измерителей угловых скоростей объектов ракетно-космической техники, при этом они используются как в качестве одноканальных измерителей, так и в качестве чувствительных элементов блоков измерителей угловых скоростей. ДУС безобогревного исполнения применяются, как правило, для решения задач, допускающих использование измерителей угловой скорости средней точности. К таким измерителям относятся измерители угловой скорости, используемые в системах управления ракетно-космических объектов в качестве резервных систем, заменяющих прецизионную систему управления, рассчитанную на высокоточное измерение угловых скоростей в малых диапазонах (не более 3-4°/с) и обеспечивающих измерение угловых скоростей в диапазоне не менее 10°/с в случае возникновения в эксплуатации особых условий; в системах успокоения колебаний объектов, в системах измерения упругих колебаний корпуса ракеты, в телеметрических системах.
Диапазон измеряемых угловых скоростей для измерителей средней точности составляет 10-36°/с.
Нерешенной проблемой таких датчиков угловой скорости средней точности является зависимость от температуры статической характеристики (масштабного коэффициента) вследствие изменения характеристик магнитопровода и омического сопротивления обмотки датчика момента и динамических характеристик прибора - АЧХ и ФЧХ - вследствие изменения динамической вязкости поддерживающей жидкости при изменении температуры в рабочем диапазоне, характерном для таких гироскопических приборов, 0…+50°C.
Для телеметрических измерителей угловой скорости (например, для приборов серии КХ79-043, КХ79-044…КХ79-052 - всего десять измерителей, отличающихся диапазоном измерения 6°/с, 18°/с) погрешности масштабного коэффициента (в процентах) и динамических характеристик - для АЧХ в процентах, для ФЧХ - в градусах фазового запаздывания - задаются в технических условиях в виде таблиц значений погрешностей. Эти погрешности учитываются системой управления при анализе результатов телеметрических измерений. Такая процедура возможна, если телеметрическая информация предназначена для послеполетного анализа при отработке изделий.
При использовании безобогревных поплавковых ДУС средней точности в резервных системах управления для контроля упругих колебаний корпуса ступени ракеты-носителя и внесения в полете соответствующих поправок в систему управления статическая и динамические характеристики измерителя должны быть инвариантны к изменению температуры. Поэтому проблема обеспечения термоинвариантности характеристик должна быть решена в конструкции прибора.
В качестве аналога может быть рассмотрено техническое решение, описанное в [1]. Для обеспечения неизменности коэффициента демпфирования, а следовательно, и динамических характеристик поплавкового ДУС во всем диапазоне рабочих температур в конструкции предусматриваются специальные компенсаторы, обеспечивающие изменение рабочего зазора между диаметром поплавка и корпусом в зависимости от температуры.
Проблемой таких ДУС является также зависимость от температуры статической характеристики (масштабного коэффициента) вследствие изменения характеристик магнитопровода и сопротивления медной обмотки датчика момента при изменении температуры.
В качестве прототипа рассматривается безобогревной поплавковый ДУС, описанный в [2], в котором имеется поплавковая гирокамера и аналоговый усилитель обратной связи, динамические характеристики которого и их определенная температурная независимость обеспечиваются с помощью корректирующих R-C цепей усилителя обратной связи, выбор и расчет которых осуществляются методами теории автоматического регулирования.
Прибор имеет термошунты, обеспечивающие термоинвариантность статической характеристики (масштабного коэффициента) в пределах ±0,1%.
Поскольку вязкость поддерживающей жидкости изменяется в 4 раза при изменении температуры в рабочем диапазоне, то прототип обладает недостатком, присущим всем безобогревным поплавковым ДУС в части зависимости динамических характеристик от температуры, скорректированных в определенной степени выбором корректирующих R-C цепей. Прототип имеет усилитель обратной связи, включающий следующие звенья: предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур, содержащий интегратор и R-C цепи, усилитель мощности и нагрузочный резистор.
При действии входной угловой скорости вокруг оси чувствительности прибора (оси, перпендикулярной вектору кинетического момента и оси прецессии) возникает гироскопический момент по оси прецессии, который стремится повернуть гирокамеру вокруг оси прецессии на некоторый угол, сигнал с датчика угла поступает на предварительный усилитель, который выполняется по схеме полосового усилителя с определенным коэффициентом усиления; обычно полосовой усилитель настраивают на резонанс с частотой питания обмотки возбуждения датчика угла. На выходе предварительного усилителя получается синусоидальное переменное напряжение, которое выпрямляется фазочувствительным выпрямителем, обычно представляющим собой апериодическое звено. Интегратор придает системе астатизм, т.е. обеспечивает отработку входного воздействия без отклонения гироузла от исходного положения. Корректирующий контур, как правило, имеет две форсирующие постоянные времени и обеспечивает замкнутой системе необходимый запас устойчивости по амплитуде и фазе. Усилитель мощности обеспечивает уровень тока обратной связи, необходимый для уравновешивания гироскопических моментов в диапазоне измеряемых прибором угловых скоростей.
Прототип по сравнению с аналогом имеет преимущество - термоинвариантность статической характеристики, т.е. постоянство с высокой точностью масштабного коэффициента безобогревного измерителя угловой скорости в рабочем диапазоне температур.
Недостатком прототипа являются существенные значения температурных погрешностей динамических характеристик, которые не могут быть устранены корректирующими устройствами, выполненными на R-C цепях.
Задачей изобретения является обеспечение термоинвариантности динамических характеристик - АЧХ и ФЧХ, в рабочем диапазоне температур, характерном для гироскопических приборов.
Для этого в безобогревном термоинвариантном электромеханическом поплавковом измерителе угловой скорости, содержащем гироблок, усилитель обратной связи и источник питания, при этом гироблок содержит гироскоп, помещенный в поплавковую гирокамеру, датчик угла, датчик момента, к обмотке которого подсоединены термошунты; усилитель обратной связи, содержит предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур, усилитель мощности, нагрузочный резистор, при этом вход предварительного усилителя соединен с сигнальной обмоткой датчика угла, а выход предварительного усилителя - с входом фазочувствительного выпрямителя, выход которого соединен с входом интегратора корректирующего контура, выход корректирующего контура соединен с входом усилителя мощности, а выход усилителя мощности соединен с первым выводом обмотки датчика момента гироблока, нагрузочный резистор соединен первым выводом с обмоткой датчика момента, вторым выводом - с общей шиной, при этом гироскоп имеет термозависимую постоянную времени и термозависимый коэффициент передачи, а интегратор выполнен на первом операционном усилителе и имеет обратную связь, включающую резистор RИ и емкость CИ, при этом гироблок имеет постоянную времени Tг(t°) и коэффициент передачи Kг(t°) имеющие известные температурные зависимости, согласно изобретению корректирующий контур выполнен в виде последовательного соединения интегро-дифференцирующего звена и сумматора, интегро-дифференцирующее звено с зависящей от температуры форсирующей постоянной времени 

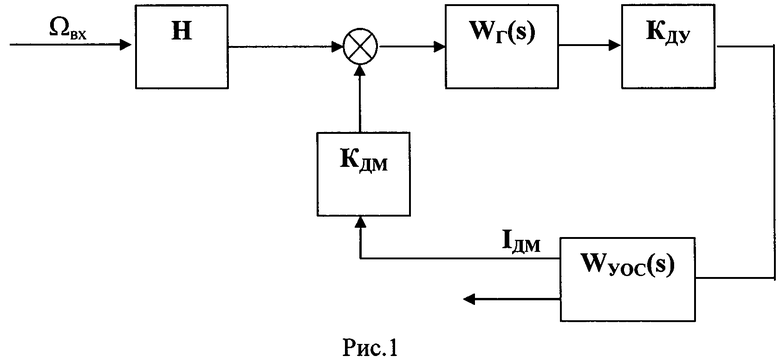
На рис.1 представлена схема, отражающая общие признаки прототипа и патентуемого прибора.
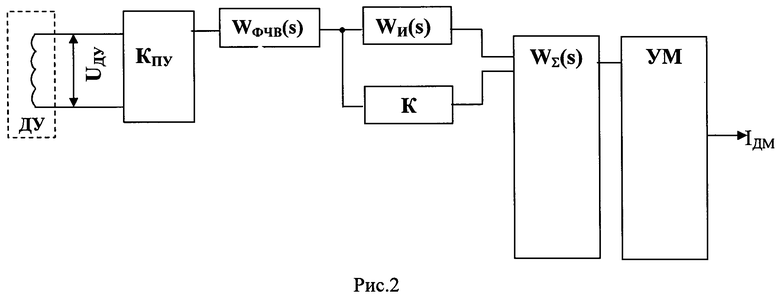
На рис.2 представлена структура усилителя обратной связи патентуемого прибора, содержащая новые звенья и новые связи между звеньями.
На рис.3 приведена структурная схема патентуемого прибора.
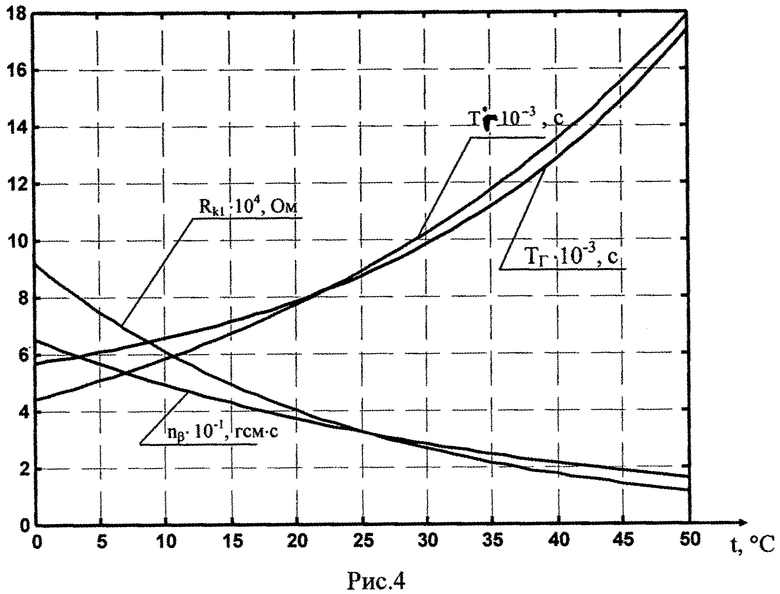
На рис.4 представлены графики: температурной зависимости коэффициента жидкостного демпфирования поплавкового ДУС; график температурной зависимости постоянной времени гироскопа TГ, обусловленной температурной зависимостью коэффициента жидкостного демпфирования; график температурной зависимости сопротивления Rк1, используемого в качестве средства компенсации в предлагаемой схеме; и график температурной зависимости постоянной времени 
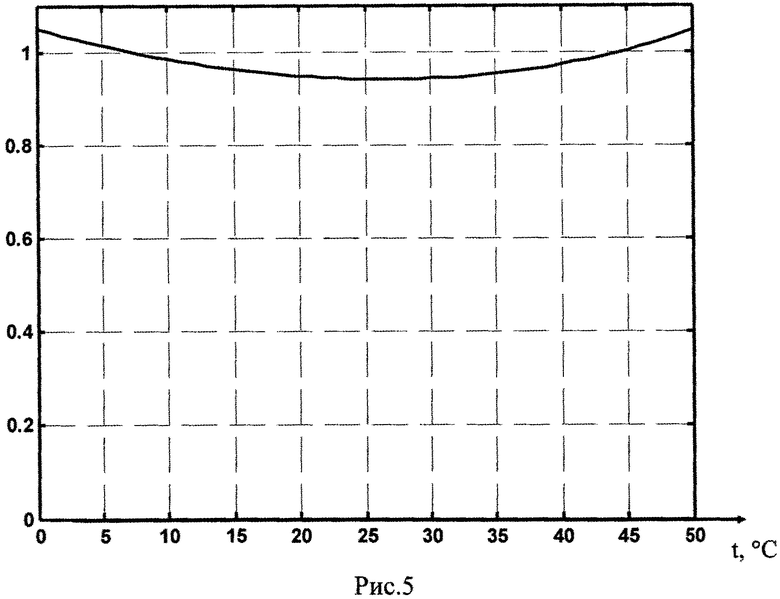
На рис.5 представлен график зависимости от температуры произведения коэффициента передачи гироскопа на коэффициент передачи введенного нового звена-сумматора, подтверждающий получение постоянства этого произведения, что также является условием обеспечения термоинвариантности динамических характеристик.
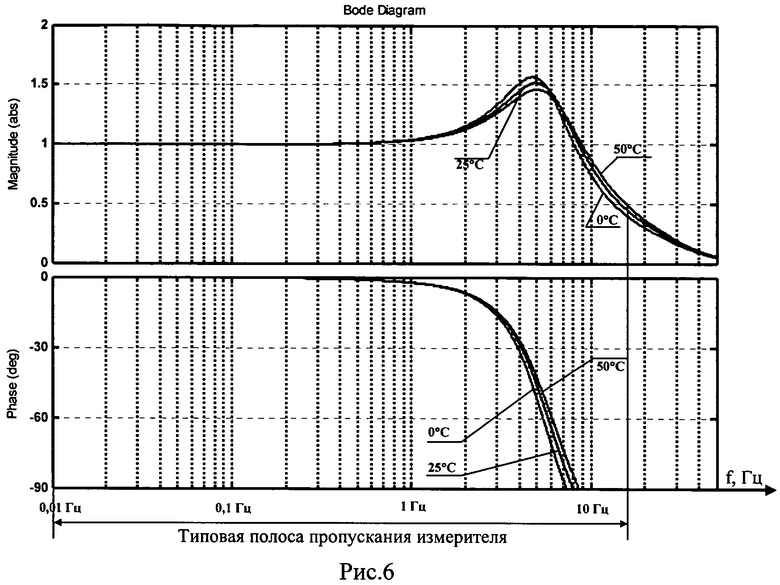
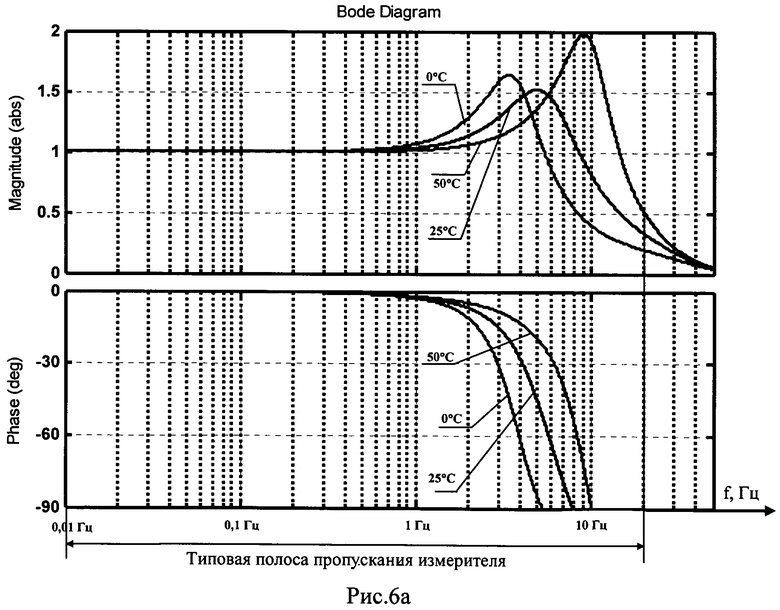
На рис.6 представлены АЧХ и ФЧХ патентуемого прибора, рассчитанные и измеренные в диапазоне рабочих температур, демонстрирующие полученную термоинвариантность прибора.
На рис.6а представлены те же АЧХ и ФЧХ прибора-прототипа, не обладающие свойством термоинвариантности.
В состав предлагаемого прибора входит гироблок, усилитель обратной связи и источник питания. Гироблок представляет собой поплавковую гирокамеру, взвешенную в поддерживающей жидкости, вязкость которой зависит от температуры, при этом изменение вязкости происходит не менее чем в 4 раза при изменении температуры в рабочем диапазоне 0…+50°C, что вызывает соответствующую зависимость от температуры динамических характеристик.
На оси прецессии закреплены ротор индукционного датчика угла и ротор магнитоэлектрического датчика момента. Статоры датчиков закреплены на корпусе прибора.
Прибор имеет термошунты, обеспечивающие термоинвариантность статической характеристики (масштабного коэффициента) с достаточно высокой точностью, не менее ±0,1%. Термошунты выполнены в виде никелевого и манганинового проводов, которые намотаны на корпус прибора и подсоединены к обмотке датчика момента. Соединение выполняется на специальной колодке, закрепленной на корпусе прибора, к лепесткам колодки подпаиваются как концы проводов, реализующих термошунты, так и выходы безмоментных токоподводов, к которым подсоединена обмотка датчика момента, закрепленная на гироузле. Расчет длины проводов и схема их подключения выполнены таким образом, чтобы суммарный ток, протекающий через обмотку датчика момента, не изменялся при изменении температуры. Этот эффект достигается за счет того, что коэффициент температурного сопротивления меди равен 0,0039 1/град, коэффициент температурного сопротивления никеля равен 0,005 1/град, а у манганина практически не зависит от температуры, т.к. равен 0,00003 1/град.
Поэтому выбором схемы подключения и выбором длины шунтирующего никелевого провода можно обеспечить постоянство суммарного тока, протекающего через обмотку датчика момента и через шунт при изменении температуры; манганиновый провод служит в качестве компенсатора, который может корректировать необходимое значение сопротивления шунта без изменения его температурных характеристик. Датчик момента имеет две обмотки, к которым подключены выбранные указанным образом термошунты, обеспечивающие термоинвариантность крутизны характеристики датчика момента; одна обмотка является обмоткой обратной связи, а вторая используется в качестве обмотки имитации - для задания входных воздействий, имитирующих действие на прибор входной угловой скорости.
Усилитель обратной связи включает предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур с интегратором, усилительным звеном и сумматором, усилитель мощности и нагрузочный резистор.
Предварительный усилитель, вход которого связан с выходом датчика угла ДУСа, выполнен по схеме полосового усилителя с определенным коэффициентом усиления. Это полосовой усилитель, настроенный на резонанс с частотой питания обмотки возбуждения датчика угла. На выходе предварительного усилителя получается синусоидальное переменное напряжение, которое выпрямляется фазочувствительным выпрямителем, который представляет собой апериодическое звено.
Интегратор выполнен на операционном усилителе и имеет обратную связь, включающую резистор RИ и емкость CИ. В усилитель обратной связи введен корректирующий контур, который выполнен в виде последовательного соединения интегро-дифференцирующего звена с зависящей от температуры форсирующей постоянной времени 
Параллельное соединение резистора R∑ и конденсатора C∑ обеспечивает комплексное сопротивление Z=R∑/(R∑C∑s+1), которое позволяет обеспечить формирование форсирующей постоянной времени сумматора, используемой в качестве дополнительного средства обеспечения устойчивости системы.
Обратная связь сумматора выполнена на активной составляющей комплексного сопротивления: резисторе R∑ и втором терморезисторе Rk2(t°), обеспечивающих термозависимый коэффициент передачи сумматора, равный 
Выход сумматора соединен с входом усилителя мощности. За счет выбора параметров обеспечено такое значение термозависимого коэффициента усиления усилительного звена 

Выход усилителя мощности соединен с обмоткой датчика момента.
Интегратор придает системе астатизм, т.е. обеспечивает отработку входного воздействия без отклонения гироузла от исходного положения. Интегро-дифференцирующее звено и сумматор имеют форсирующие постоянные времени и обеспечивают замкнутой системе необходимый запас устойчивости по амплитуде и фазе. Усилитель мощности обеспечивает уровень тока обратной связи, подаваемого в обмотку обратной связи датчика момента для уравновешивания гироскопических моментов в диапазоне измеряемых прибором угловых скоростей.
Рассмотрим работу прибора и покажем, что предложенная конструкция обеспечивает термоинвариантность динамических характеристик, т.е. независимость от температуры амплитудно-частотной (АЧХ) и фазово-частотной (ФЧХ) характеристик.
Известно, что АЧХ и ФЧХ прибора полностью определяются передаточной функцией прибора, поэтому ниже доказывается, что в приборе предложенной конструкции передаточная функция замкнутой системы по току обратной связи датчика момента остается неизменной (с заданной точностью) при изменении температуры в рабочем диапазоне температур для прибора.
Первым условием обеспечения термоинвариантности динамических характеристик такого прибора методом аппаратной компенсации, которая используется в предлагаемой схеме, является предварительное обеспечение термоинвариантности статической характеристики (масштабного коэффициента) прибора за счет подключения к обмотке датчика момента термошунтов, рассчитанных определенным образом. Эта операция известна, реализуется в приборе-прототипе и поэтому здесь не рассматривается.
Вторым условием обеспечения термоинвариантности динамических характеристик безобогревного поплавкового измерителя угловой скорости методом аппаратной компенсации является выполнение такой настройки прибора за счет выбора параметров - величин резисторов Ry, RИ, емкости CИ, величины первого терморезистора Rk1(t°), изменяющейся при изменении температуры, чтобы значение термозависимого коэффициента усиления усилительного звена 

Вначале покажем правильность выражений для термозависимого коэффициента усиления усилительного звена и форсирующей постоянной времени
Структура, показанная на рис.1, является общей для прототипа и заявляемого прибора. Усилитель обратной связи заявляемого прибора имеет специальную структуру, представленную на рис.2, в которую входят как звенья, общие для прототипа и заявляемого прибора - предварительный усилитель, фазочувствительный выпрямитель, интегратор, усилитель мощности, нагрузочный резистор, так и новые звенья - усилительное звено и сумматор, соединенные новыми связями, что и позволяет получить новое качество прибора.
На рис.1 и рис.2 обозначено:
H, KДУ, KДМ, Uду - кинетический момент гироскопа, коэффициент передачи датчика угла, коэффициент передачи датчика момента, напряжение с сигнальной обмотки датчика угла соответственно,
ΩВХ - входная угловая скорость, WУОС(s) - передаточная функция УОС,
IДМ - ток датчика момента, Kпу - коэффициент передачи предварительного усилителя,
Wфчв(s) - передаточная функция фазочувствительного выпрямителя, Wи(s) - передаточная функция интегратора, K=K(t°) - коэффициент передачи усилительного звена, W∑(s) - передаточная функция сумматора.
Передаточная функция гироскопа поплавкового ДУС может быть записана:
где nβ(t°) - коэффициент жидкостного демпфирования поплавковой гирокамеры, Iβ - момент инерции поплавковой гирокамеры, 
TГ(t°) и KГ(t°) зависят от температуры, поскольку nβ(t°) зависит от температуры.
Закон изменения коэффициента жидкостного демпфирования nβ(t°) ДУС конкретной конструкции известен, т.к. определяется известным законом изменения от температуры вязкости поддерживающей жидкости. Кроме того, если нужна особо высокая точность определения закона nβ(t°), то это выполняется для каждого изготавливаемого образца прибора известным методом.
Значения кинематической и динамической вязкости поддерживающей жидкости обычно задаются в технических условиях на жидкость, что позволяет рассчитать для конкретной конструкции закон nβ(t°). Кроме того, если нужно знать уточненный закон изменения коэффициента жидкостного демпфирования в ДУС, который обусловлен законом изменения от температуры вязкости поддерживающей жидкости и, кроме того, зависит от рабочего зазора и других конструктивных размеров, то известен прямой способ точного экспериментального определения nβ(t°). Этот способ заключается в следующем. Размыкают обратную связь. Подают эталонное значение тока в обмотку имитации ДУС, поворачивают гирокамеру до одного упора, затем этим же током поворачивают до второго упора и при этом измеряют время поворота от упора к упору, изменяют направление тока, сохраняя его величину, и поворачивают гирокамеру от одного упора к другому. Угол между упорами точно известен и записан в паспорт ДУС. Поскольку обратная связь разомкнута, то справедливо равенство: 

Фазочувствительный выпрямитель имеет передаточную функцию WФЧВ(s) и представляет собой импульсный ФЧВ, который является апериодическим звеном.

Интегратор имеет передаточную функцию:

где RИ, CИ - сопротивление и емкость в обратной связи интегратора, TИ - постоянная времени интегратора, 
Усилительное звено имеет передаточную функцию:

где Rу - сопротивление, Rk1(t°) - сопротивление терморезистора в обратной связи усилительного звена. Выражение (4) записано по правилам включения операционного усилителя [3] для случая, когда входное воздействие подается на неинвертирующий вход операционного усилителя, а обратная связь организуется на инвертирующем входе операционного усилителя, как это имеет место в предлагаемой схеме.
Новое параллельное соединение интегратора и усилительного звена дает передаточную функцию:

Передаточная функция (5) есть передаточная функция интегро-дифференцирующего звена с зависящей от температуры форсирующей постоянной времени 
 ,
,
а форсирующая постоянная времени 

и зависит от температуры по закону, определяемому K(t°).
Ниже будет показано, что зависимость (7) форсирующей постоянной времени 
Доказательство удобнее вести на конкретном числовом примере значений параметров, относящихся к конкретному ДУС, например прибору КХ79-060, входящему в состав прототипа и изготавливаемому серийно филиалом ФГУП «НПЦАП» - «ПО «Корпус»; прибор является безобогревным поплавковым электромеханическим ДУС, у которого динамические характеристики зависят от температуры и для которого была решена задача обеспечения термоинвариантности динамических характеристик путем построения усилителя обратной связи патентуемой структуры. Этот ДУС удобен для рассмотрения тем, что в его конструкции выполнено первое условие, т.е. ДУС имеет термошунты, подключенные к обмотке датчика момента, и, как следствие, обеспечена термоинвариантность статической характеристики ДУС. После рассмотрения конкретного числового примера выполнения второго условия, можно показать общий характер реализации этого условия - для любых ДУС.
Числовой пример
Численные значения параметров ДУС КХ79-060 при температуре 25°C приведены в Таблице 1.
Выберем резистор Rу=76,7 кОм, а также применим в качестве терморезистора Rк1 терморезистор ОСМ ТР1 ОЖО468.224ТУ, сопротивление которого изменяется в зависимости от температуры по закону, представленному на графике рис.4.
На том же графике рис.4 представлен закон изменения от температуры коэффициента демпфирования прибора ДУС КХ79-060, определенный законом изменения от температуры вязкости жидкости.
Определяющим фактором для выбора терморезистора является закон изменения от температуры вязкости (коэффициента жидкостного демпфирования) поддерживающей жидкости. Поскольку вязкость всех поддерживающих жидкостей уменьшается при увеличении температуры, то выбирается терморезистор с отрицательным температурным коэффициентом сопротивления (ТКС), т.е. терморезистор, сопротивление которого также уменьшается при увеличении температуры в рабочем диапазоне температур 0…+50°C, характерном для гироскопических приборов.
Для построения на рис.4 графиков Rк1(t°) и nβ(t°) использованы экспоненциальные функции: Rк1(t°)=92·103e-0,046t и nβ(t°)=65·e-0,028t, которые дают с достаточно высокой степенью точности значения Rк1(t°) и nβ(t°), измеренные на температурах 0°C, 25°C и +50°C, и позволяют воссоздать непрерывный закон изменения параметров Rк1(t°) и nβ(t°) для всех значений температур рабочего диапазона. Такая процедура может быть выполнена для любой поддерживающей жидкости и любого выбранного терморезистора.
Выберем параметры интегратора: Rи=20 кОм, CИ=0,1 мкФ, тогда Rи·CИ=TИ - постоянная времени интегратора, равна TИ=0,2·10-2 с.
В Таблице 2 представлены расчеты постоянной времени гироскопа 


Полученное равенство постоянной времени гироскопа

Третьим условием обеспечения термоинвариантности динамических характеристик безобогревного поплавкового ДУС методом аппаратной компенсации является выполнение такой настройки прибора за счет выбора параметров, при которой обеспечено постоянство с заданной точностью во всем диапазоне рабочих температур прибора величины произведения коэффициента передачи сумматора 
Суммирующее звено, входящее в структуру УОС, (рис.2) также, как и интегро-дифференцирующее звено, участвует в обеспечении устойчивости системы. Суммирующее звено имеет передаточную функцию W∑(s):
 ,
,
где R∑, C∑ - резистор и емкость в цепи обратной связи суммирующего звена, RН - нагрузочный резистор в цепи обратной связи, с которого снимается выходное напряжение ДУС, соответствующее измеренной угловой скорости ΩВХ.
Коэффициент передачи суммирующего звена K∑:

В коэффициент передачи K∑ входит отношение сопротивления терморезистора Rk2(t°) к сопротивлению резистора R∑, стоящего на входе суммирующего звена.
Форсирующая постоянная времени суммирующего звена T∑, равная T∑=R∑·C∑, участвует в обеспечении запасов устойчивости системы.
Выражение (8) для передаточной функции W∑(s) может быть переписано в виде:

Рассмотрим реализацию третьего условия на том же численном примере.
Коэффициент передачи усилителя обратной связи 

Поскольку в (10a) только K∑(t°) зависит от температуры, то требования постоянства во всем температурном диапазоне произведения KГ(t°)·K∑(t°) и 
Требование обеспечения 

Условие для выбора терморезистора Rk2(t°) может быть записано в виде:

Для рассмотренного выше примера, относящегося к практически реализованному по патентуемой схеме прибору, выбраны следующие значения параметров, входящих в (13):
коэффициент передачи предварительного усилителя Kпу=15,
коэффициент передачи ФЧВ Kфчв=1,
коэффициент передачи интегратора KИ=500,
R∑=105 Ом, RН=150 Ом.
Из (13) следует, что для выполнения третьего условия отношение (13) во всем температурном диапазоне должно быть равно 1·103 (при A=0,5).
В качестве терморезистора Rк2 выбран терморезистор ОСМТР1 ОЖО468.224ТУ, который при температуре 25°C имеет сопротивление 33 кОм и для которого известен в соответствии с его ТУ закон изменения сопротивления при изменении температуры на один градус.
Зная законы изменения от температуры Rк2(t°) и nβ(t°), можно построить график, приведенный на рис.5, изменения в зависимости от температуры произведения коэффициента передачи сумматора
Из графика видно, что сделанный выбор параметров позволяет обеспечить отклонение указанного произведения от постоянной во всем температурном диапазоне величины, не превышающее 5%.
Рассмотрим работу прибора в условиях эксплуатации.
При действии вокруг оси чувствительности прибора переменных угловых скоростей, например при упругих колебаниях корпуса ракеты, возникает гироскопический момент по оси прецессии, который также представляет собой момент, изменяющийся с частотой колебаний объекта. Выходное напряжение, поступающее с нагрузочного резистора усилителя обратной связи прибора, используется системой управления для формирования поправок на колебания корпуса ракеты. Эти колебания могут происходить при температуре окружающей среды, принадлежащей рабочему диапазону температур прибора. Для правильного функционирования прибора в системе управления, если по информации прибора вырабатываются, например, поправки на измеренные прибором упругие колебания корпуса ракеты, важно, чтобы выходное напряжение, снимаемое с нагрузочного резистора усилителя обратной связи прибора, по амплитуде и фазе точно отражало колебания объекта, для этого нужна термоинвариантность динамических характеристик - АЧХ и ФЧХ.
Покажем, что при наличии настройки, выполненной на заводе-изготовителе указанным выше образом, в условиях эксплуатации при изменении температуры в диапазоне рабочих температур гироскопического прибора передаточная функция и, следовательно, динамические характеристики прибора оказываются термоинвариантными с высокой степенью точности, заданной для прибора.
Передаточная функция УОС, имеющего структуру по рис.2, может быть записана в виде:

где коэффициент передачи УОС 

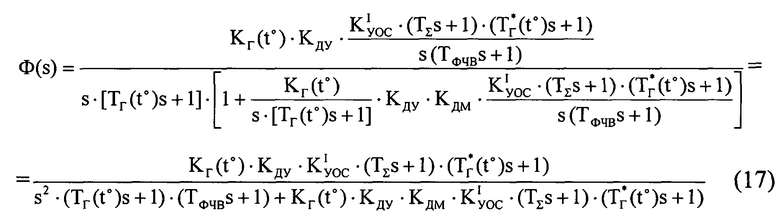
Передаточная функция замкнутой системы по току ДМ имеет вид:

Покажем, что при использовании усилителя обратной связи рассмотренной выше структуры и при выполнении трех условий, которые обоснованы выше, передаточная функция (16) замкнутой системы регулирования безобогревного поплавкового ДУС термоинвариантна в рабочем диапазоне температур, чему соответствует термоинвариантность динамических характеристик ДУС - АЧХ и ФЧХ.
Для этого подставим в (16) выражения для входящих передаточных функций звеньев:
Пусть при настройке на заводе-изготовителе выполнено 2-е условие обеспечения термоинвариантности динамических характеристик безобогревных поплавковых ДУС, т.е. обеспечено во всем рабочем диапазоне температур ДУС равенство 
При выполнении условия 

В (18) учтено, что
Пусть при настройке на заводе-изготовителе выполнено 3-е условие обеспечения термоинвариантности динамических характеристик безобогревных поплавковых ДУС, т.е. во всем диапазоне рабочих температур ДУС обеспечено постоянство величины произведения коэффициента передачи гироскопа KГ(t°) на коэффициент передачи УОС 
Учтем, что 
Если обеспечено 

Поскольку у предлагаемых ДУС выполняется 1-е условие, т.е. KДМ=const во всем диапазоне рабочих температур за счет подключения к обмотке датчика момента термошунтов, рассчитанных определенным образом [3], то передаточная функция Ф(s) при Kраз=const не зависит от температуры, т.е. обеспечена термоинвариантность динамических характеристик ДУС.
Расчетная и экспериментальная проверка предлагаемой конструкции безобогревного поплавкового термоинвариантного ДУС.
Для рассмотренного выше численного примера выбора параметров прибора, сделанного с использованием параметров конкретного ДУС КХ79-060, который изготавливается предприятием серийно и имеет при использовании усилителя обратной связи классической структуры, приведенной для прототипа на рис.1, зависимые от температуры динамические характеристики (рис.6а), был применен усилитель обратной связи предложенной структуры и сделаны расчеты динамических характеристик в диапазоне температур 0…+50°C. Результаты приведены на рис.6, из которого следует, что АЧХ и ФЧХ прибора во всем температурном диапазоне практически не изменяются.
Таким образом, применение в поплавковом безобогревном ДУС, имеющем за счет подключения к обмотке датчика момента термошунтов термоинвариантный масштабный коэффициент, усилителя обратной связи, в котором корректирующий контур имеет специальную структуру, с помощью которой обеспечено равенство постоянных времени TГ(t°) и 

Количественная оценка достигнутой степени термоинвариантности АЧХ и ФЧХ при изменении температуры может быть сделана путем сравнения полученных динамических характеристик рис.6 с характеристиками той же системы, выполненной на усилителе традиционной структуры рис.6a. Это сравнение показывает эффективность предложенного технического решения.
Экспериментальная проверка показала полное совпадение расчетных и экспериментальных значений АЧХ и ФЧХ прибора и их термоинвариантность в диапазоне рабочих температур.
Таким образом, заявлен безобогревной термоинвариантный электромеханический поплавковый измеритель угловой скорости, содержащий гироблок, усилитель обратной связи и источник питания, при этом гироблок содержит гироскоп, помещенный в поплавковую гирокамеру, датчик угла, датчик момента, к обмотке которого подсоединены термошунты; усилитель обратной связи содержит предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур, усилитель мощности, нагрузочный резистор Rн, при этом вход предварительного усилителя соединен с сигнальной обмоткой датчика угла гироблока, выход предварительного усилителя соединен с входом фазочувствительного выпрямителя, выход которого соединен с входом интегратора корректирующего контура, выход корректирующего контура соединен с входом усилителя мощности, выход которого соединен с первым выводом обмотки датчика момента гироблока, нагрузочный резистор соединен первым выводом со вторым выводом обмотки датчика момента, а вторым выводом - с общей шиной, интегратор выполнен на первом операционном усилителе и имеет обратную связь, включающую резистор Rи и емкость Cи, при этом гироблок имеет постоянную времени Tг(t°) и коэффициент передачи Kг(t°) имеющие известные температурные зависимости. Отличительная особенность имерителя заключается в том, что корректирующий контур выполнен в виде последовательного соединения интегро-дифференцирующего звена и сумматора, интегро-дифференцирующее звено с зависящей от температуры форсирующей постоянной времени

Литература
1. С.Ф. Коновалов, Е.А. Никитин, Л.М. Селиванова Гироскопические системы. Проектирование гироскопических систем. Ч. 111. - M.: Высшая школа, 1980 г., стр.73-75.
2. Труды 4-ой научно-технической конференции молодых ученых и специалистов. Приборы и системы управления ракетно-космических комплексов. Изд. ФГУП «НПЦАП», 2010 г., стр.268-281.
3. П.В. Куропаткин. Теория автоматического управления. - M.: Высшая школа, 1973 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЛИНЕЙНОСТИ МАСШТАБНОГО КОЭФФИЦИЕНТА МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА КОМПЕНСАЦИОННОГО ТИПА | 2016 |
|
RU2626071C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
Изобретение относится к измерительной технике, а именно к средствам измерения угловых скоростей в системах управления движущимися объектами. Технический результат - расширение функциональных возможностей. Для этого измеритель содержит гироблок, усилитель обратной связи, содержащий предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур с интегратором, выполненным на первом операционном усилителе, усилитель мощности, нагрузочный резистор и источник питания, при этом к обмотке датчика момента гироблока подсоединены термошунты. Корректирующий контур выполнен в виде последовательного соединения интегро-дифференцирующего звена и сумматора, интегро-дифференцирующее звено с зависящей от температуры форсирующей постоянной времени состоит из интегратора и усилительного звена, подключенного параллельно интегратору; усилительное звено состоит из второго операционного усилителя и обратной связи. 6 ил., 2 табл.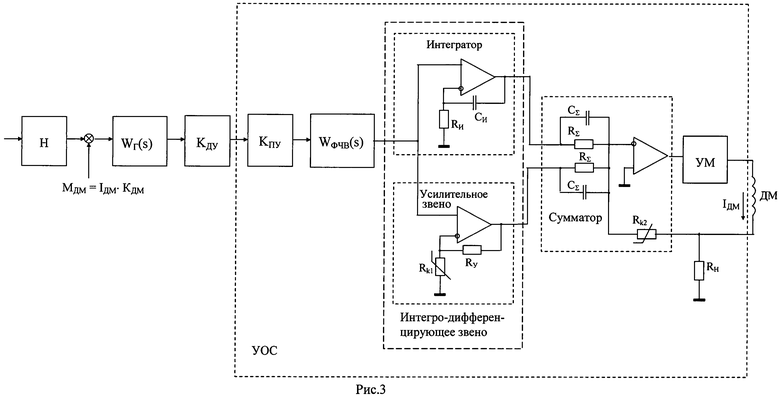
Безобогревной термоинвариантный электромеханический поплавковый измеритель угловой скорости, содержащий гироблок, усилитель обратной связи и источник питания, при этом гироблок содержит гироскоп, помещенный в поплавковую гирокамеру, датчик угла, датчик момента, к обмотке которого подсоединены термошунты; усилитель обратной связи содержит предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур, усилитель мощности, нагрузочный резистор Rн, при этом вход предварительного усилителя соединен с сигнальной обмоткой датчика угла гироблока, выход предварительного усилителя соединен с входом фазочувствительного выпрямителя, выход которого соединен с входом интегратора корректирующего контура, выход корректирующего контура соединен с входом усилителя мощности, выход которого соединен с первым выводом обмотки датчика момента гироблока, нагрузочный резистор соединен первым выводом со вторым выводом обмотки датчика момента, а вторым выводом - с общей шиной, интегратор выполнен на первом операционном усилителе и имеет обратную связь, включающую резистор Rи и емкость Cи, при этом гироблок имеет постоянную времени Tг(t°) и коэффициент передачи Kг(t°), имеющие известные температурные зависимости, отличающийся тем, что корректирующий контур выполнен в виде последовательного соединения интегро-дифференцирующего звена и сумматора, интегро-дифференцирующее звено с зависящей от температуры форсирующей постоянной времени  состоит из интегратора и усилительного звена, подключенного параллельно интегратору; усилительное звено состоит из второго операционного усилителя и обратной связи, образованной резистором Rу и первым терморезистором Rk1(t°), причем Rу включен между выходом второго операционного усилителя и его инвертирующим входом, a Rk1(t°) - между инвертирующим входом второго операционного усилителя и общей шиной, при этом выход фазочувствительного выпрямителя соединен с неинвертирующим входом интегратора и неинвертирующим входом усилительного звена; сумматор с зависящим от температуры коэффициентом передачи K∑(t°) состоит из третьего операционного усилителя, второго терморезистора Rk2(t°), первого и второго одинаковых по величине резисторов R∑ и двух одинаковых по величине емкостей C∑, выход сумматора соединен с входом усилителя мощности, выходы интегратора и усилительного звена соединены с инвертирующим входом третьего операционного усилителя, соответственно, через первый и второй резисторы R∑, к каждому из которых параллельно подключена емкость C∑, второй терморезистор Rk2(t°) подключен первым выводом к инвертирующему входу третьего операционного усилителя, а вторым выводом - к точке соединения второго вывода обмотки датчика момента и первого вывода нагрузочного резистора Rн; при этом выполнение интегро-дифференциирующего звена на резисторах Rу, Rk1(t°), Rи и емкости Cи обеспечивает термозависимость коэффициента усиления усилительного звена
состоит из интегратора и усилительного звена, подключенного параллельно интегратору; усилительное звено состоит из второго операционного усилителя и обратной связи, образованной резистором Rу и первым терморезистором Rk1(t°), причем Rу включен между выходом второго операционного усилителя и его инвертирующим входом, a Rk1(t°) - между инвертирующим входом второго операционного усилителя и общей шиной, при этом выход фазочувствительного выпрямителя соединен с неинвертирующим входом интегратора и неинвертирующим входом усилительного звена; сумматор с зависящим от температуры коэффициентом передачи K∑(t°) состоит из третьего операционного усилителя, второго терморезистора Rk2(t°), первого и второго одинаковых по величине резисторов R∑ и двух одинаковых по величине емкостей C∑, выход сумматора соединен с входом усилителя мощности, выходы интегратора и усилительного звена соединены с инвертирующим входом третьего операционного усилителя, соответственно, через первый и второй резисторы R∑, к каждому из которых параллельно подключена емкость C∑, второй терморезистор Rk2(t°) подключен первым выводом к инвертирующему входу третьего операционного усилителя, а вторым выводом - к точке соединения второго вывода обмотки датчика момента и первого вывода нагрузочного резистора Rн; при этом выполнение интегро-дифференциирующего звена на резисторах Rу, Rk1(t°), Rи и емкости Cи обеспечивает термозависимость коэффициента усиления усилительного звена 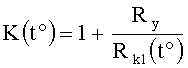 и термозависимость величины форсирующей постоянной времени интегро-дифференцирующего звена
и термозависимость величины форсирующей постоянной времени интегро-дифференцирующего звена  , которая во всем диапазоне рабочих температур прибора остается равной с заданной точностью Tг(t°); выполнение сумматора на резисторах R∑ и Rk2(t°) и их соединение с резистором Rн обеспечивает термозависимость коэффициента передачи сумматора
, которая во всем диапазоне рабочих температур прибора остается равной с заданной точностью Tг(t°); выполнение сумматора на резисторах R∑ и Rk2(t°) и их соединение с резистором Rн обеспечивает термозависимость коэффициента передачи сумматора 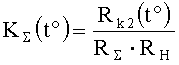 и постоянство с заданной точностью во всем диапазоне рабочих температур прибора величины произведения K∑(t°)·Kг(t°); а параллельное подключение к каждому из резисторов R∑ емкости C∑ обеспечивает формирование дополнительной форсирующей постоянной времени для обеспечения запаса устойчивости измерителя.
и постоянство с заданной точностью во всем диапазоне рабочих температур прибора величины произведения K∑(t°)·Kг(t°); а параллельное подключение к каждому из резисторов R∑ емкости C∑ обеспечивает формирование дополнительной форсирующей постоянной времени для обеспечения запаса устойчивости измерителя.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ФГУП "НПЦАП", 2010 г., стр.268-281 | |||
| СПОСОБ УСТРАНЕНИЯ ТРЕНДА В МОДУЛЯЦИОННОМ ГИРОСКОПЕ | 2003 |
|
RU2262074C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| US 8459113 B2, 11.06.2013 | |||

