Изобретение относится к гироскопическим преобразователям угловой скорости и может быть использовано для измерения параметров движения, а именно при разработке бесплатформенных инерциальных навигационных систем и систем управления движением подвижных объектов различного назначения, например для угловой стабилизации вращающихся объектов, таких как: буры установок для глубокого вращательного бурения, системы ориентации и навигации различных космических аппаратов и разгонных блоков, авиационной техники, беспилотных летательных аппаратов, а также в любых отраслях науки и техники, в которых требуется получение информации об угловых скоростях подвижного объекта.
Известен гидродинамический гироскоп [RU 2410645 Гидродинамический гироскоп], содержащий корпус, приводимый в движение внешним электродвигателем, ротор со сферической полостью, частично заполненной жидкостью и размещенный в ней сферический поплавок с установленным в его экваториальной плоскости постоянным магнитом кольцевой формы, цилиндрический магнитопровод с закрепленным внутри него полым цилиндрическим каркасом с кольцевой проточкой на наружной поверхности, котором выполнены два кольцевых выступа, расположенных симметрично относительно кольцевой проточки. Полость заполнена фторорганической жидкостью - хладоном 114 В2 с содержанием в нем массовой доли воды не более 0,002%.
Недостатками данного гидродинамического гироскопа являются: возникновение фазовой ошибки вследствие проскальзывания поплавка в слое жидкости, а также наличие колебаний и трения в подвесе (в подшипнике скольжения), что снижает точность измерения угловой скорости.
Известен гидродинамический гироскоп [RU 2433375 Гидродинамический гироскоп], содержащий корпус, ротор со сферической полостью, частично заполненной жидкостью, электрический двигатель, соединенный посредством муфты с осью ротора, сферический поплавок со сквозным аксиальным отверстием, устройство аксиального центрирования поплавка, жестко закрепленное в центре поплавка и двух осевых опор, установленных в сферической полости вдоль ее оси вращения. Двигатель содержит спиральную ленточную пружину.
Недостатком гидродинамического гироскопа являются: трение в подвесе ротора и его разбалансировка, приводящие к снижению точности измерений и уходу гироскопа.
Известен гидродинамический гироскоп [SU 263178 А1 Гидродинамический гироскоп], содержащий кожух, сферическая полость которого заполнена жидкостью, поплавок, приводной двигатель и датчик угла, карданный подвес, выполненный в виде крестовины, одна перекладина которой жестко связана со втулкой, укрепленной через шарикоподшипники в поплавке, а другая перекладина соединена через шарикоподшипники с вилкой, которая посредством торсиона связана с кожухом.
Недостатком гидродинамического гироскопа являются трение в подвесе, а также разбалансировка ротора в связи с ростом величины угловой скорости и, как следствие, увеличение порога чувствительности из-за упругой деформации торсионов и отсутствующей обратной связи.
Известен насос высокого давления для жидкого металла [US 2716943 Liquid metal high pressure pump], состоящий из источника питания, нескольких катушек, последовательно соединенных друг с другом, параллельными к ним сопротивлениями, эквивалентные сопротивлению якоря жидкого металла, два намагничиваемых сердечника в осевом направлении, с зазором между ними в центральной части насоса формируют полюсы для радиального магнитного поля. Таким образом, ток, который поступает в насос через проводник развивает магнитодвижущую силу, и, как следствие, течение жидкого металла в насосе.
Недостатками насоса высокого давления для жидкого металла является нагрев жидкого металла при прохождении через него электрического тока, и, следовательно, высокой рассеиваемой мощности, при этом ток проходящий через жидкий метал его ионизирует, что влияет на работу устройства контроля течения жидкости (возникновению зарядов на электродах) и следовательно низкой точности контроля скорости течения.
Известен магнитогидродинамический гироскоп [US 3026731 Magnetohydrodynamic gyroscope], содержащий узел электромагнитного статора, имеющий концентрические удлиненные элементы магнитного сердечника, разделенные тонким радиальным зазором, в котором вращающееся радиальное магнитное поле, при перемещении вмещающего узла вокруг чувствительной оси определенные вспомогательные вторичные потоки жидкости снижают трение.
Одним из существенных недостатков рассматриваемого датчика является изменение характеристик жидкости, обусловленных отсутствием сильфона, что приводит к повышенной температурной зависимости выходного сигнала, так же не производится компенсация изменения сопротивления обмоток выходного сигнала что так же влияет на величину выходного напряжения пропорционального измеряемой угловой скорости.
Известен магнитогидродинамический измеритель угловой скорости [SU 521518 Магнитогидродинамический измеритель угловой скорости], содержащий вращающийся жидкий ротор, соединенный отверстиями с камерой индукционного датчика, помещенной в магнитное поле, который имеет первую пару электродов, связанных с входом усилителя. Вторая пара электродов обратной связи связана через двигатель напряжения с выходом усилителя. При возникновении угловой скорости, вектор которой совпадает с продольной осью камеры, между отверстиями образуется перепад давлений, пропорциональный этой скорости, причем жидкость начинает перетекать в камере, помещенной в магнитное поле, а на электродах образуется напряжение пропорциональное измеряемой скорости.
Недостатком магнитогидродинамического измерителя угловой скорости является ограниченный диапазон измеряемых угловых скоростей, обусловленный возникновением нелинейности масштабного коэффициента и непостоянством величины кинетического момента, вызванной нарушением ламинарного потока жидкости из-за прямоугольной формы сечения измерительного канала.
Наиболее близким по технической сущности и достигаемому эффекту к заявленному изобретению является магнитогидродинамический датчик угловой скорости [Никитин Е.А., Балашова А.А. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров, М.: Машиностроение, 1960. - 217 с.], состоящий из цилиндрического корпуса, выполненного из материала с высоким коэффициентом магнитной проницаемости, сносно с цилиндрическим корпусом располагается цилиндрический статор с обмотками, создающими вращающееся магнитное поле в кольцевом зазоре между корпусом и статором. С торцов кольцевой зазор замкнут двумя медными втулками, которые выполняют функцию токосборных колец асинхронного двигателя. В кольцевой зазор заливают ртуть, которая увлекается вращающимся магнитным полем статора и выполняющая роль ротора гироскопа. В каждом из торцов кольцевого зазора с ртутью имеется пара отверстий, сообщающихся с дифференциальным датчиком давления 6 образующих вместе датчик угла.
Одним из существенных недостатков рассматриваемого датчика является низкий порог чувствительности, обусловленный отсутствием сильфона - постоянной составляющей давления девствующего на упругую мембрану датчика давления (отсутствие отрицательной обратной связи). Так же из недостатков можно выделить высокое энергопотребление, так как ртуть является диамагнетиком то, следовательно, для ее разгона в кольцевом зазоре требуется получить достаточно мощное вращающееся низкочастотное электромагнитное поле. При изготовлении такого датчика так же имеются трудности технологического характера из-за высокой степени токсичности ртути, так же применение ртути в конструкции ограничивает области применения датчика.
Технической проблемой настоящего изобретения является необходимость повышения точности измерения угловой скорости, расширение диапазона измерения угловых скоростей, расширение диапазона рабочих температур и упрощение конструкции прибора.
Техническим результатом является разработанный магнитогидродинамический датчик угловых скоростей, конструкция которого упрощена по сравнению с аналогами, за счет применения ферромагнитной жидкости. Применение несущей жидкости на полигликолевой основе, сохраняющей свои механические характеристики (вязкость) в широком диапазоне температур (от -60 до +300°C), обеспечивает стабильные характеристики чувствительного элемента (движение жидкости в замкнутом контуре ламинарное) и расширяет диапазон рабочих температур. За счет использования круглого сечения замкнутого контура, полностью исключены конвекционные вихри при смещении линий тока ферромагнитной жидкости, как это было в случае с квадратным или прямоугольным сечением [Никитин Е.А., Балашова А.А. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров, М.: Машиностроение, 1960. - 217 с.] замкнутого контура, таким образом получено расширение диапазона измеряемых угловых скоростей. Так как ферромагнитная жидкость обладает магнитными свойствами по сравнению с диамагнитной ртутью, следовательно, для разгона ферромагнитной жидкости в замкнутом контуре требуется меньше энергии по сравнению с ртутью, за счет чего происходить улучшение энергоэффективности изобретения.
Поставленная задача решается тем, что в магнитогидродинамическом датчике угловой скорости, конструкция не содержит вращающихся механических частей, а носителем кинетического момента в конструкции выступает ферромагнитная жидкость, в качестве датчика угла используется бесконтактный индукционный метод контроля смещения линий тока жидкости в замкнутом контуре круглого сечения; с целью расширения диапазона измерения угловых скоростей использован замкнутый контур круглого сечения; с целью расширения диапазона рабочих температур в качестве несущей жидкости использован раствор на полигликолевой основе получивший широкое распространение в промышленности в качестве тормозной жидкости автотранспортных средств; с целью упрощения конструкции ртуть заменена на ферромагнитную жидкость. Применение несущей жидкости на полигликолевой основе, сохраняющей свои механические характеристики (вязкость) в широком диапазоне температур (от -60 до +300°C), обеспечивает стабильные характеристики чувствительного элемента (движение жидкости в замкнутом контуре ламинарное) и расширяет диапазон рабочих температур.
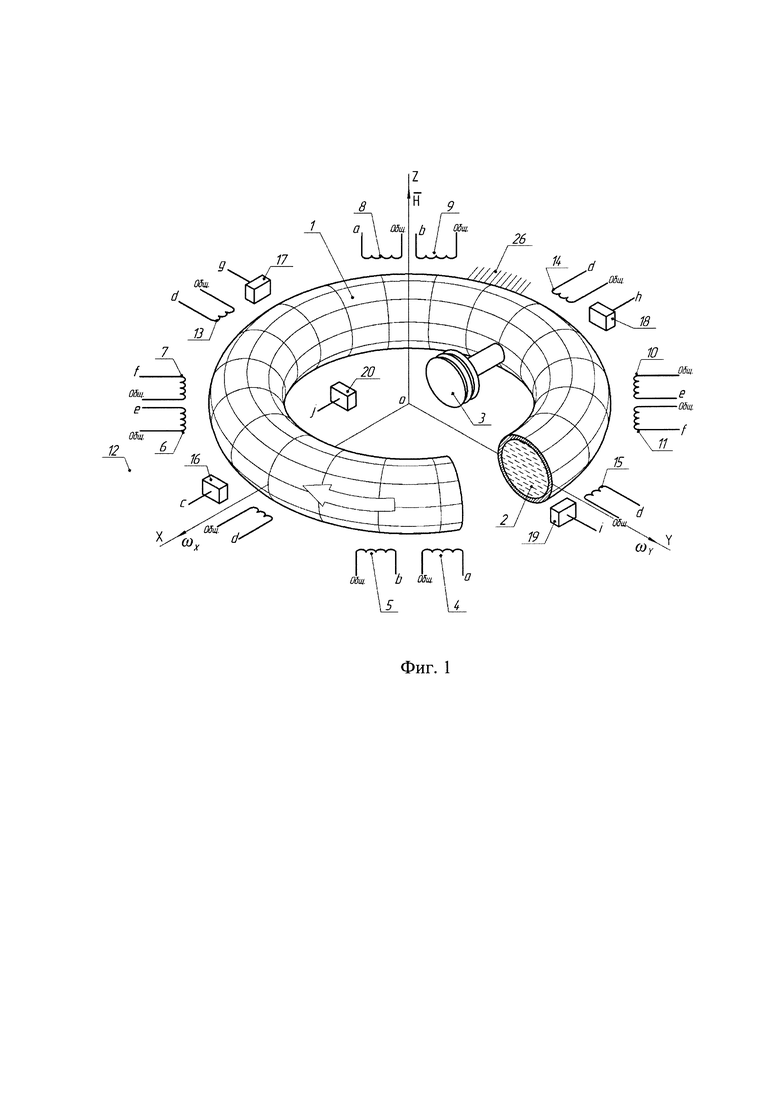
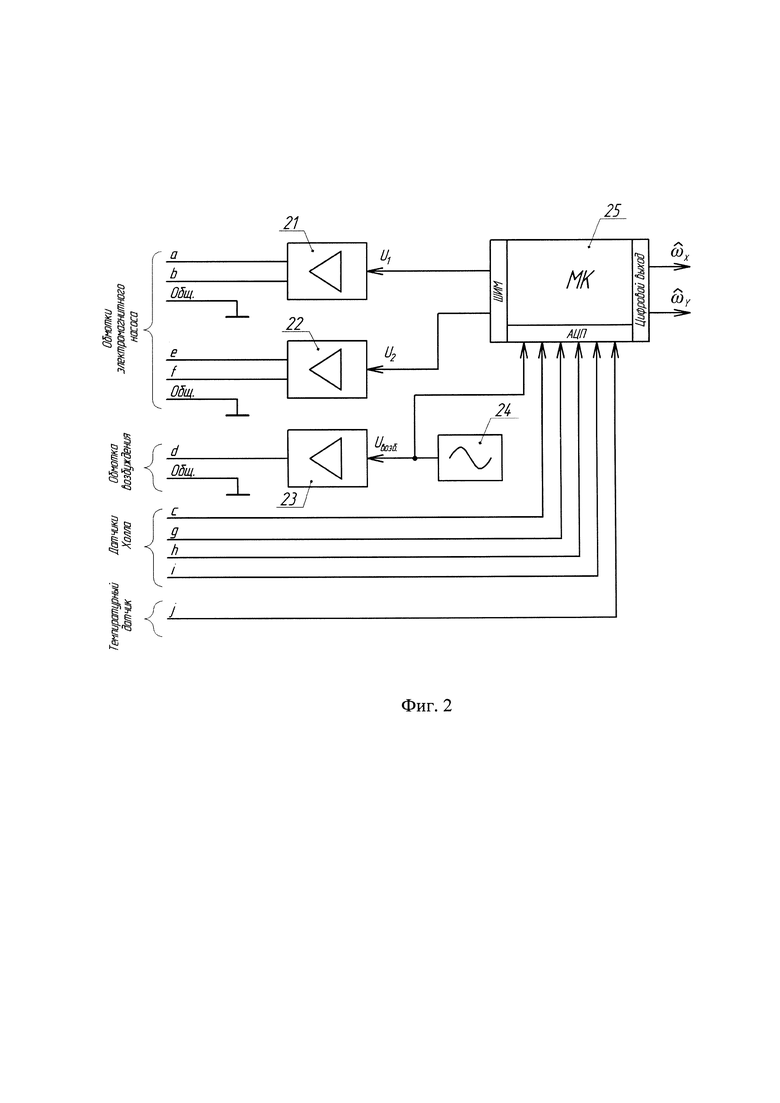
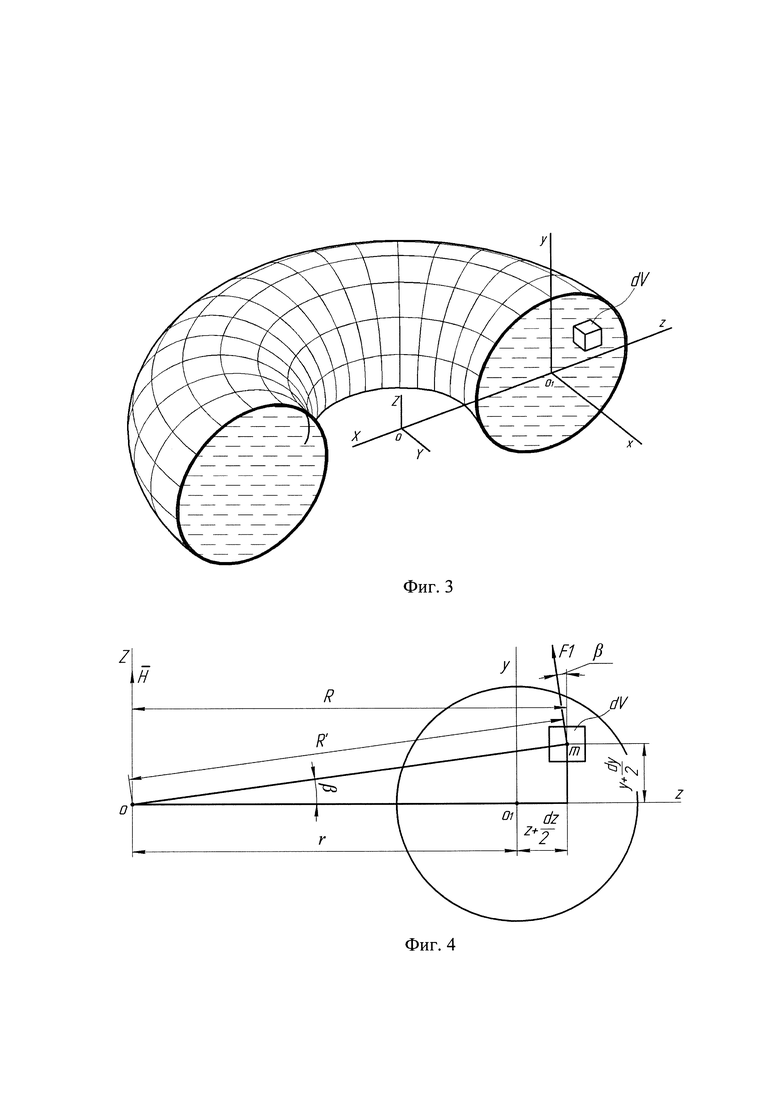
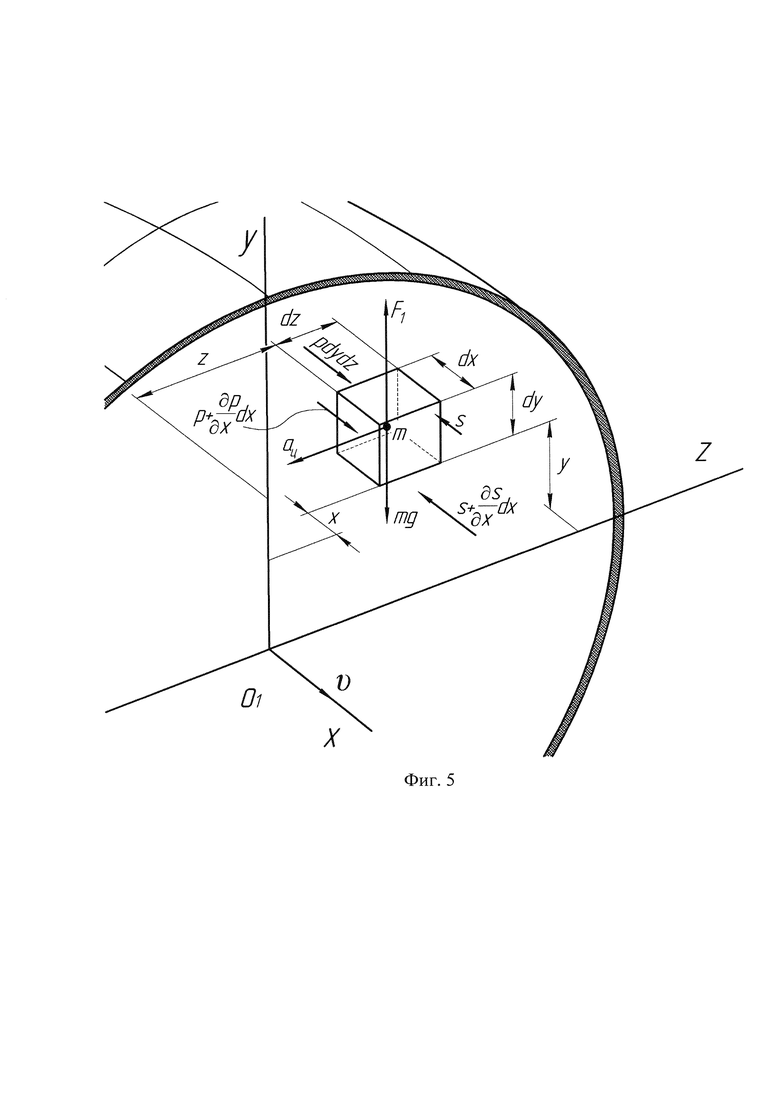
Сущность изобретения поясняется следующими чертежами, где на фиг. 1 приведена электрокинематическая схема магнитогидродинамического датчика угловой скорости с жидким ферромагнитным ротором; на фиг. 2 показана структурная схема устройства; на фиг. 3 представлен замкнутый жидкостной контур, на котором показано сечение канала; на фиг. 4 приводится пояснение к определению радиуса окружности; на фиг. 5 приводится пояснение к выводу уравнения движения жидкости.
Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором (фиг. 1 и 2) содержит корпус с тороидальной полостью 1; ферромагнитную жидкость 2; сильфон 3; обмотки электромагнитного насоса 4, 5, 6, 7, 8, 9, 10, 11; обмотки возбуждения магнитного датчика угла 12, 13, 14, 15; датчики Холла 16, 17, 18, 19; датчик температуры 20; усилитель мощности 21, 22, 23; генератор частоты опорного сигнала 24; микроконтроллер 25, корпус прибора 26.
Корпус с тороидальной полостью 1 жестко закреплен в корпусе прибора 26 и заполнен ферромагнитной жидкостью 2, сильфон 3 соединен с внутренней полостью корпуса с тороидальной полостью 1 и компенсирует разность давления с окружающей средой. На корпусе с тороидальной полостью 1 (попарно на осях ОY и OX) жестко закреплены обмотки возбуждения магнитного датчика угла 12, 13, 14, 15 и датчики Холла 16, 17, 18, 19. Датчик температуры 20 расположен внутри корпуса 26. Обмотки электромагнитного насоса 4 и 8, соединены параллельно и подключены входом "а" к выходу "а" усилителя мощности 21. Аналогичным образом, обмотки электромагнитного насоса 5 и 9, соединены параллельно и подключены входом "b" к выходу "b" усилителя мощности 21. Обмотки электромагнитного насоса 6 и 10, соединены параллельно и подключены входом "e" к выходу "e" усилителя мощности 22. Обмотки электромагнитного насоса 7 и 11, соединены параллельно и подключены входом "f" к выходу "f" усилителя мощности 22. Обмотки возбуждения магнитного датчика угла 12, 13, 14, 15 соединены параллельно и подключены входом "d" к выходу "d" усилителя мощности 23. Входы усилителей мощности 21 и 22 подключены к выходам широтно-импульсной модуляции (ШИМ) микроконтроллера 25. Выход генератора частоты опорного сигнала 24 соединен со входом усилителя мощности 23, а так же входом аналого-цифрового преобразователя (АЦП) микроконтроллера 25. Выходы датчиков Холла 16, 17, 18, 19 соединены с соответствующими входами АЦП микроконтроллера 25. К входу микроконтроллера 25 подключен выход датчика температуры 20.
Работа магнитогидродинамического датчика угловой скорости с жидким ферромагнитным ротором осуществляется следующим образом. После подачи питания происходит загрузка программно-математического обеспечения записанного в память микроконтроллера 25, после чего микроконтроллер 25 поочередно задает напряжения U1 и U2 на выходах ШИМ, которые поступают на входы усилителей мощности 21 и 22 соответственно. При подаче напряжения U1 на усилитель мощности 21, в обмотках электромагнитного насоса 4, 8 и 5, 9 протекает ток, причем напряжение на выходе "а", усилителя мощности 21, сдвинуто по фазе относительно напряжения на выходе "b" на угол 30…80 градусов. При этом ферромагнитная жидкость 2 находящаяся в канале корпуса с тороидальной полостью 1 поляризуется не одновременно, а с некоторым запаздыванием, что приводит к ее движению вдоль канала и разгону. Аналогичным образом при подаче напряжения U2 на усилитель мощности 22, в обмотках электромагнитного насоса 6, 10 и 7, 11 течет ток, причем напряжение на выходе "e", усилителя мощности 22, сдвинуто по фазе относительно напряжения на выходе "f" на угол 60…90 градусов, что так же приводит к поляризации ферромагнитной жидкости с некоторым запаздыванием и ее движению вдоль канала с последующим разгоном. Применение двух усилителей мощности 21 и 22 позволяет повысить скорость и плавность (равномерное распределение скорости) движения ферромагнитной жидкости 2 в канале корпуса с тороидальной полостью 1, а также позволяет реализовать алгоритмы управления позволяющие производить сглаживание переходных процессов при повышенных перегрузках вибрационного и ударного характера.
Выходное напряжение Uвозб генератора частоты опорного сигнала 24, имеет гармонический характер, и поступает на вход усилителя мощности 23, а после чего на обмотки возбуждения магнитного датчика угла 12, 13, 14, 15, которые соединены параллельно и подключены выходу усилителя мощности 23. Выходное напряжение Uвозб генератора частоты опорного сигнала 24 так же поступает на вход АЦП микроконтроллера 25 и предназначено для синхронизации измерений. Ферромагнитная жидкость 2, находящаяся корпусе с тороидальной полостью 1, поляризуется вблизи расположения обмоток возбуждения магнитного датчика угла 12, 13, 14, 15. При движении ферромагнитной жидкости 2 в канале корпуса с тороидальной полостью 1 поляризованные (намагниченные) области ферромагнитной жидкости перемещаются вдоль канала корпуса с тороидальной полостью 1. Под действием сил, составляющих гироскопический момент поляризованные области ферромагнитной жидкости 2 перемещаются не только вдоль канала корпуса с тороидальной полостью 1, но и смещаются в поперечном направлении канала корпуса с тороидальной полостью 1 на величину пропорциональную измеряемой угловой скорости. Поперечные перемещения поляризованных областей ферромагнитной жидкости 2 измеряются при помощи датчиков Холла 16, 17, 18, 19, выходной сигнал которых, пропорциональный измеряемой угловой скорости, поступает на соответствующие входы АЦП микроконтроллера 25. Изменение температуры внутри корпуса прибора производится при помощи датчика температуры 20, выходной сигнал которого пропорционален измеряемой температуре внутри корпуса прибора и поступает на соответствующий вход АЦП микроконтроллера 25.
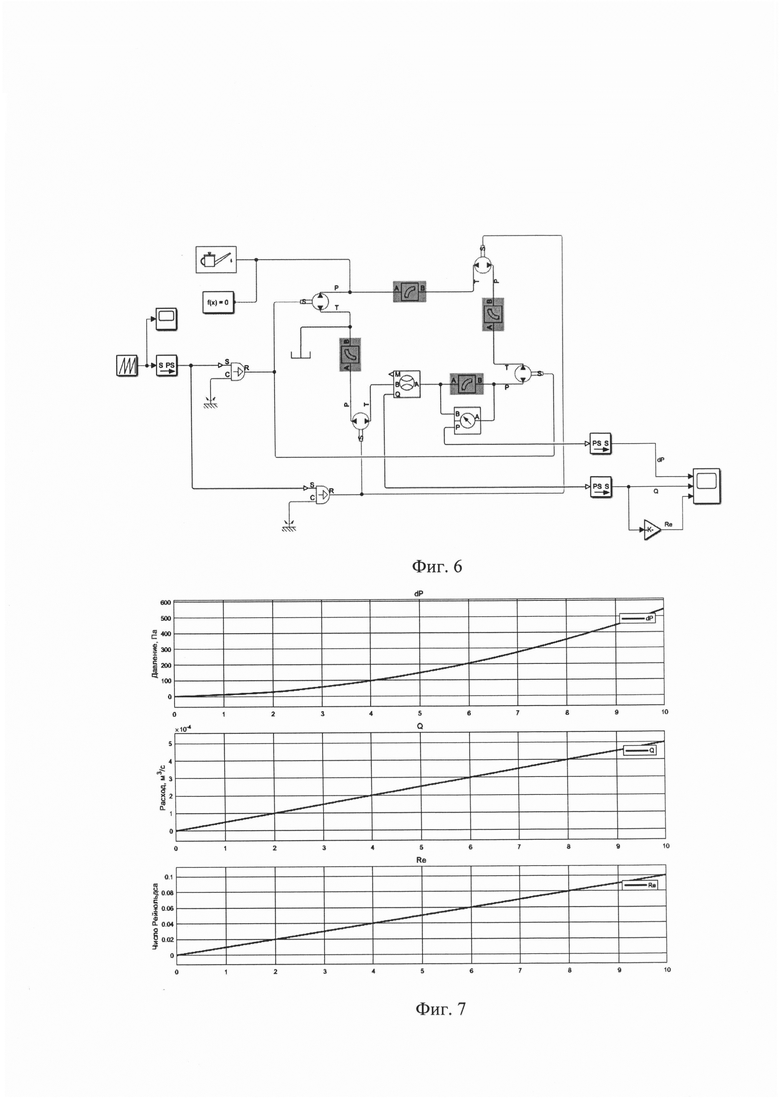
Характер движения потока ферромагнитной жидкости 2 может быть ламинарным или турбулентным. В случае ламинарного движения траектория движения частиц ферромагнитной жидкости параллельна оси канала и образует линии тока, повторяющие форму канала и параллельные его оси симметрии. При этом - число Рейнольдса составляет не более 2⋅103 и определяется формулой:
 (1)
(1)
где  - средняя скорость потока, определяемая по расходу жидкости; d - диаметр канала;
- средняя скорость потока, определяемая по расходу жидкости; d - диаметр канала;  - кинематическая вязкость.
- кинематическая вязкость.
Для вывода уравнения движения ферромагнитной жидкости, выделим в ламинарном потоке элементарный объем dV и обозначены системы координат (фиг. 3):
OXYZ - система координат, связанная с точкой центра масс тора, заполненного жидкостью;
O1xyz - система координат, точка О1 которой лежит на оси симметрии канала O1x.
Элементарный объем жидкости при этом записывается как:
 (2)
(2)
Пусть выделенный элементарный объем dV имеет некоторое смещение относительно оси симметрии канала О1х. На выделенный элементарный объем dV, согласно второму закону Ньютона, действуют силы, которые уравновешиваются движущей силой.
 (3)
(3)
На выделенный элементарный объем ферромагнитной жидкости действуют следующие силы: 1. Сила тяжести. Согласно второму закону Ньютона, сила зависящая от массы "m" и ускорения силы тяжести "g":
 (4)
(4)
Для выделенного объема сила тяжести будет равна:
 (5)
(5)
где  - плотность жидкости; g - ускорение силы тяжести.
- плотность жидкости; g - ускорение силы тяжести.
При горизонтальном расположении канала сила  направлена перпендикулярно к оси симметрии канала О1х, вдоль которой движется поток ферромагнитной жидкости 2.
направлена перпендикулярно к оси симметрии канала О1х, вдоль которой движется поток ферромагнитной жидкости 2.
2. Центростремительное ускорение. При движении по окружности с радиусом R на точку центра масс "m" (фиг. 4) выделенного элементарного объема dV будет действовать центростремительное ускорение, направленное к оси вращения (фиг. 5) величина которого выражается формулой:
 (6)
(6)
где R - радиус окружности.
Так как выделенный объем dV имеет смещение вдоль оси О1z, то расстояние до оси вращения определим по фиг. 4:
 (7)
(7)
3. Составляющая гироскопического момента. Известно, что при вращающении, любое тело приобретает гироскопические свойства, а именно - кинетический момент  . Движение элементарного объема dV по окружности радиуса R приводит к тому, что жидкостной контур приобретает кинетический момент , вектор которого совпадает с осью симметрии корпуса с тороидальной полостью 1 OZ (фиг. 4). При воздействии измеряемой угловой скорости
. Движение элементарного объема dV по окружности радиуса R приводит к тому, что жидкостной контур приобретает кинетический момент , вектор которого совпадает с осью симметрии корпуса с тороидальной полостью 1 OZ (фиг. 4). При воздействии измеряемой угловой скорости  или
или  (фиг. 1) приложенной к корпусу с тороидальной полостью 1, при этом на элементарный объем dV будет действовать одна из пары сил составляющих гироскопический момент:
(фиг. 1) приложенной к корпусу с тороидальной полостью 1, при этом на элементарный объем dV будет действовать одна из пары сил составляющих гироскопический момент:
 (8)
(8)
где  - гироскопический момент; - измеряемая угловая скорость действующая вокруг оси OZ; - кинетический момент.
- гироскопический момент; - измеряемая угловая скорость действующая вокруг оси OZ; - кинетический момент.
Кинетический момент при этом равен:
 (9)
(9)
где  - осевой момент инерции элементарного объема dV;
- осевой момент инерции элементарного объема dV;  - угловая скорость вращения элементарного объема dV.
- угловая скорость вращения элементарного объема dV.
Осевой момент инерции элементарного объема dV массы "m" движущегося на расстоянии R от точки О (фиг. 4) определяется из соотношения:
 (10)
(10)
Угловая скорость вращения элементарного объема dV связана со средней скоростью потока следующим соотношением:
 (11)
(11)
Принимая выделенный объем dV как материальную точку массой "m" согласно фиг. 4 записывается гироскопический момент как:
 (12)
(12)
Так как гироскопический момент обусловлен парой сил, то следовательно,получено:
 (12*)
(12*)
или
 (12**)
(12**)
Плечо  приложения пары сил F1 и F2 составляющих гироскопический момент определяется из известного соотношения, как гипотенуза при известном значении двух катетов:
приложения пары сил F1 и F2 составляющих гироскопический момент определяется из известного соотношения, как гипотенуза при известном значении двух катетов:
 (13)
(13)
Откуда сила действующая на элементарный объем определяется следующим соотношением:
 (14)
(14)
Учитывая, что сила F1 приложена под углом к нормали, определяется угол наклона вектора и проекцию этой силы:
 (14*)
(14*)
4. Равнодействующая силы давления зависит от разницы давления текущей жидкости на переднюю и заднюю грани выделенного объема в направлении движения жидкости. Предполагается, что если на заднюю грань выделенного объема будет действовать давление "p", то на переднюю будет действовать избыточное, определяемое как приращение равное частной производной длины выделенного объема по координате оси движения (фиг. 5). При движении жидкости вдоль оси О1х будет иметь вид:
 (15)
(15)
Равнодейcтвующая силы двления в этом случае определяется как:
 (16)
(16)
При этом равнодейcтвующая силы двления направлена в сторону противоположную движению жидкости.
5. Сила трения, как правило, направлена в противоположную сторону относительно вынуждающей силы и противодействует движению. В данном случае возникает на боковых (левой и правой) гранях выделенного элементарного объема. Согласно закону жидкостного трения Ньютона, между слоями жидкости в любой точке потока возникает касательное напряжение определяемое как произведение поперечного градиента скорости и динамического коэфициента вязкости:
 (17)
(17)
где  - динамический коэффициент вязкости;
- динамический коэффициент вязкости;  - поперечный градиент скорости.
- поперечный градиент скорости.
Грань, у которой скорость движения жидкости выше, действует избыточная сила тения, определим для выделенного объема ранодействующую этой силы трения:
 (18)
(18)
Согласно закону трения Ньютона, принимается:
 (19)
(19)
и получено:
 (20)
(20)
Равнодействующая всех сил, действующих осносительно направления движения жидкости:
 (21)
(21)
Однако, согласно закону Ньютона записывается:
 (22)
(22)
записывается уравнение (21) с учетом (22):
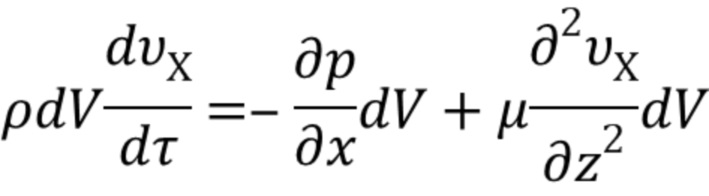 (23*)
(23*)
уравнение (23*) - в результате сокращения dV - примет вид:
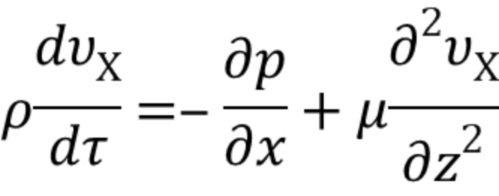 (23)
(23)
В левой части полученного уравнения записана  - полная производная от скорости по времени, которую можно записать в частных производных:
- полная производная от скорости по времени, которую можно записать в частных производных:
 (24)
(24)
В результате - получено развернутое уравнение движения жидкости в горизонтальном канале.
 (23**)
(23**)
Так как, течение жидкости ламинарное, то для канала ограниченного сечения составляющие:
 (*)
(*)
Учитывая (*), а также (14) и (14*), переписывается уравнение (23**):
 (25)
(25)
где  (**) - кинематическая вязкость.
(**) - кинематическая вязкость.
Полученное уравнение (25) описывает движение жидкости в горизонтальном канале с учетом гироскопических сил, действующих при угловом движении канала.
В случае наклонного расположения канала появляется составляющая силы тяжести  , направленная против направления движения
, направленная против направления движения
жидкости. Учитывая это, уравнение (21):

Для наклонного расположения канала уравнение (25) примет следующий вид:

Однако, при замкнутом жидкостном канале тороидальной формы составляющая силы тяжести всегда будет компенсироваться такой же составляющей противоположной по знаку, вследствие чего уравнение (25) для замкнутого тороидального канала не зависит от его углового положения.
Практической реализацией с численными параметрами, подтверждающей достижение заявленного результата, является математическая модель (фиг. 6), созданная в САПР Matlab, которая содержит жидкостной контур состоящий из угловых сегментов 4 сегментов образующих замкнутый жидкостной контур тороидальной формы, при этом между сегментами включены идеальные циркуляционные насосы, обеспечивающие непрерывную циркуляцию жидкости внутри контура. В качестве типа жидкости указана тормозная жидкость "Brake fluid DOT 3/4/5", для каждого из типов был произведен отдельный замер и сопоставлены данные. В результате - были получены графики, представленные на фиг. 7.
Технико-экономическая эффективность практического использования предлагаемого устройства заключается в следующем:
1. Использование ферромагнитной жидкости по сравнению с ртутью и другими веществами, используемыми в качестве ротора, позволяет снизить энергопотребление устройства, тем самым сделав его более экономичным и менее требовательным к электрическому питанию.
2. За счет применения магнитного датчика угла достигается повышение точности измерений и упрощение конструкции прибора.
3. Тороидальная форма внутренней полости позволяет расширить диапазон измеряемых угловых скоростей.
4. Температурная компенсация позволяет расширить диапазон рабочих температур без удорожания стоимости устройства и применения новых материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ СЛАБОДЕМПФИРОВАННОГО НЕУСТОЙЧИВОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581787C2 |
| ЖИДКОСТНОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ И ДЕМПФИРОВАНИЯ ОБЪЕКТОВ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2015 |
|
RU2595183C1 |
| Пространственный интегрирующий твердотельный волновой гироскоп | 2020 |
|
RU2763688C1 |
| ЖИДКОСТНОЙ ГИРОСКОП | 2020 |
|
RU2738020C1 |
| Датчик угла крена на базе волнового твердотельного гироскопа с металлическим резонатором | 2022 |
|
RU2787809C1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| Ротационный вискозиметр | 1976 |
|
SU651233A1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| ВИХРЕВОЙ ЖИДКОСТНОЙ ТОРОИДАЛЬНЫЙ ГИРОСКОП | 2014 |
|
RU2573606C1 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
Изобретение относится к гироскопическим преобразователям угловой скорости и может быть использовано для измерения параметров движения. Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором состоит из корпуса датчика, в котором жестко закреплен корпус, выполненный из материала с высоким коэффициентом магнитной проницаемости, в котором находится рабочая жидкость. При этом корпус имеет круглое сечение, а в качестве рабочей жидкости используется ферромагнитная жидкость на полигликолевой основе, при этом в конструкции предусмотрен сильфон, соединенный с тороидальной полостью корпуса для компенсации разности давления с окружающей средой, обмотки электромагнитного насоса, обмотки возбуждения магнитного датчика угла, датчики Холла, датчик температуры, первый, второй и третий усилители мощности, генератор частоты опорного сигнала и микроконтроллер, при этом к двум выходам первого усилителя мощности подключены две пары параллельно соединенных обмоток электромагнитного насоса, к двум выходам второго усилителя мощности подключены другие две пары параллельно соединенных обмоток электромагнитного насоса. К выходу третьего усилителя мощности подключены параллельно обмотки возбуждения магнитного датчика угла, входы первого и второго усилителей мощности подключены к выходам широтно-импульсной модуляции микроконтроллера, выход генератора частоты опорного сигнала соединен со входом третьего усилителя мощности и входом АЦП микроконтроллера, выходы четырех датчиков Холла соединены с соответствующими входами АЦП микроконтроллера, выход датчика температуры подключен к входу микроконтроллера. Технический результат – повышение точности измерения угловой скорости, расширение диапазона измерения угловых скоростей, расширение диапазона рабочих температур, а также упрощение конструкции прибора. 7 ил.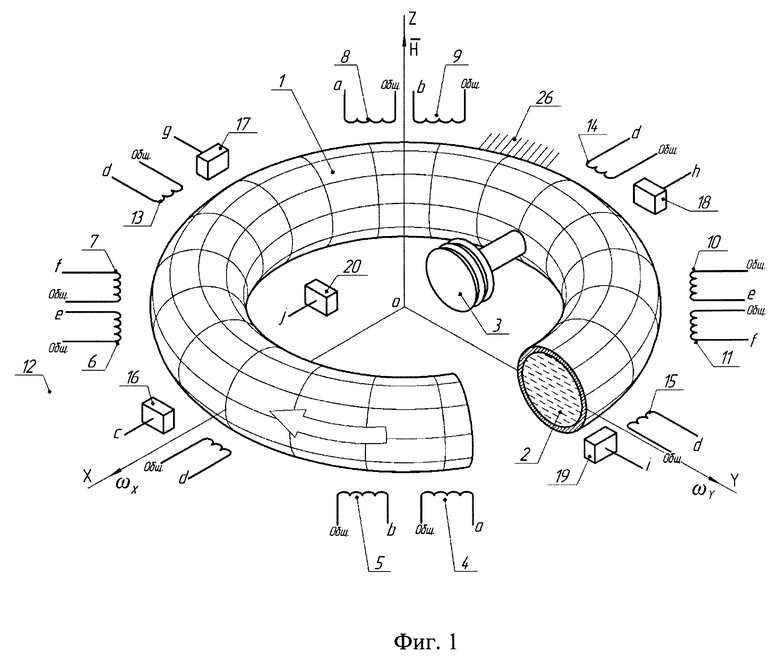
Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором, состоящий из корпуса датчика, в котором жестко закреплен корпус, выполненный из материала с высоким коэффициентом магнитной проницаемости, в котором находится рабочая жидкость, отличающийся тем, что корпус имеет круглое сечение, а в качестве рабочей жидкости используется ферромагнитная жидкость на полигликолевой основе, при этом в конструкции предусмотрен сильфон, соединенный с тороидальной полостью корпуса для компенсации разности давления с окружающей средой, обмотки электромагнитного насоса, обмотки возбуждения магнитного датчика угла, датчики Холла, датчик температуры, первый, второй и третий усилители мощности, генератор частоты опорного сигнала и микроконтроллер, при этом к двум выходам первого усилителя мощности подключены две пары параллельно соединенных обмоток электромагнитного насоса, к двум выходам второго усилителя мощности подключены другие две пары параллельно соединенных обмоток электромагнитного насоса, а к выходу третьего усилителя мощности подключены параллельно обмотки возбуждения магнитного датчика угла, входы первого и второго усилителей мощности подключены к выходам широтно-импульсной модуляции микроконтроллера, выход генератора частоты опорного сигнала соединен со входом третьего усилителя мощности и входом АЦП микроконтроллера, выходы четырех датчиков Холла соединены с соответствующими входами АЦП микроконтроллера, выход датчика температуры подключен к входу микроконтроллера.
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ С ЖИДКОСТНЫМ РОТОРОМ | 2014 |
|
RU2594035C2 |
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ С ЖИДКОСТНЫМ РОТОРОМ | 2011 |
|
RU2469337C1 |
| Магнитогидродинамический измеритель угловой скорости | 1974 |
|
SU540212A1 |
| ВИХРЕВОЙ ЖИДКОСТНОЙ ТОРОИДАЛЬНЫЙ ГИРОСКОП | 2014 |
|
RU2573606C1 |
| US 9994337 B2, 12.06.2018 | |||
| РОЛЬГАНГ СТАШЕВСКОГО И.И. | 2003 |
|
RU2258653C1 |

