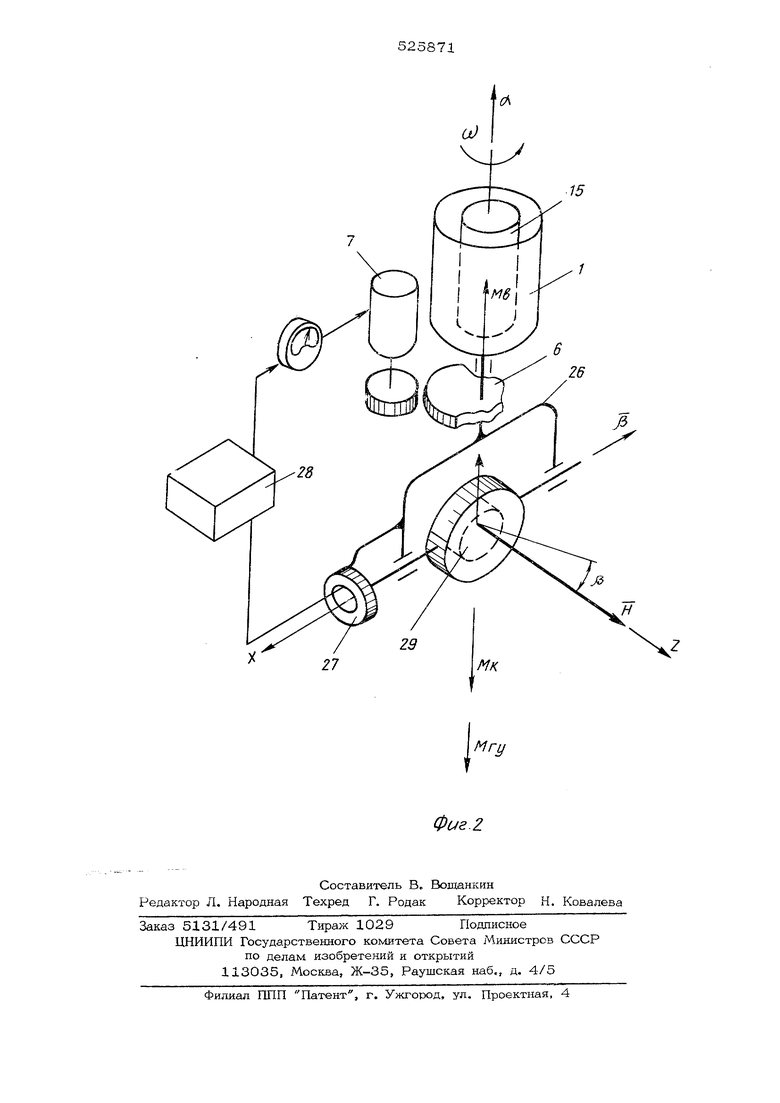
,(54) РОТАЦИОННЫЙ ВИСКОЗИМЕТР КИМ днапазоком изменения коэффициента усиления и компенсирующего электродвигателя с редуктором. Корпус двухстепенного гироскопа жестко связан с измерительным цилиндром, который имеет механическую связь через редуктор с компенсирующим электродвигателем. Компенсирующий электродвигатель чевез усилительное устройство электрически Связан с датчиком угла, статор которого жестко связан с корпусом гироскопа, а ро™ тор датчика угла установлен на выходной оси гироскопа. Такая конструкция позволяет совместить 3 едином устройстве достоинства к ягкого динамометра (за счет применения высокочувствительного двухстепенного гироскопа) и жесткого динамометра {за счет применения усилителя с широким диапазоном изменения коэффициента усиления и компенсирующего электродвигателя). На фиГо 1 изображено устройство, общий вид; на фиг, 2 - кинематическая схема динамометра. Ротационный вискозиметр состоит из из мерительного цилиндра 1, который жестко связан с валом 2, установленным посредст вом подшипников 3 и 4 в муфте 5. На валу 2 расположена шестерня 6 для механической связи с кo шeнcиpyющим электродви гателем 7. Кроме того, вал при помощи муфты 8 жестко связан с двухстепенным гироскопом 9. Муфта 5 и компенсирующий электродвигатель 7 закреплены на плите 10, установ ленной на подставке 11, которая снабжена четырьмя установочными винтами 12 для установки устройства горизонтально по уро ню. Плита 10 связана при помощи стоек 13 с плитой 14. Соосно с измерительным цилиндром 1 установлен измерительный эле мент 15. Вал 16 жестко связан с измерительным элементом 15 и посредством подшипников 17 и 18 закреплен в муфте 19, На валу 16 установлены щестерни 20 и 2 для передачи крутящего момента от основного электродвигателя 22 к измерительному элементу 15. Муфта 18 укреплена на плите 14, к которой прикреплен посредством стойки 23 и стакана 24 электродвигатель 22. На стойках 13 имеются регулировочные гайки 25 для установки соосности измерительного элемента 15 и измерительного цилиндра 1. Прибор работает следующ гм образом. В зазор между измерительным элементо J. 5 и измерительным иилиндром 1 залива-ется определенное количество исследуемого вещества. Измерительный элемент 15 приводится во вращение при помощи основного электродвигателя 22, скорость этого врашения может варьироваться ступенчато (сменой зацепления шестерен 2О и 21) и плавно (путем изменения напряжения питания электродвигателя 22) Момент вращения от измерительного элемента 15 за счет наличия сил вязкости в исследуемом веществе передается к измерительному цилиндру 1 и представляет собой меру вязкости вещества. Далее момеа.т вращения от измерительно) цил1-шдра 1 через вал 2 передаетсяК корпусу 26 двухстепенного гироскопа 9,. Корпус 26 двухстепенного rvipocsona жестко установлен на валу 2 TaKj что входная ось Y гироскопа совпадает с осью вращен.ия ck- измерительного цилиндра . Вькодной осью динамометра яг-,;яетСя ось X ги-роскопа, относительно которой установлен датчик ухла 27, состоящий из ротора и статора. Статор датчика угла жестко установлен на корпусе, 26j а ротор - на оси х и имеет возможность вращаться относительно статора. Ротор датчика угла saeKTpHHecKJ связан через усилительное устройство 28 с компенсирующим электродвигателем 7 работающим в заторможешюм режиме. Двигатель 7 механически связан через шестерни 6 с вертикальной осью измерительногча цилиндра 1. При подаче питания на гиромотор гироскопа ротор 29 лослепнего начинает вращаться с больщой угловой скоростью. Вектор Н направленный по ocKi гирюскопа, близок по величине к вектору главного момента количества движения ротора, Ei первоначальный момент измерительный цилиндр 1 и гирос- оп находятся в покое, В какой-то момент времени начинается вращение измерительного элемента 15 с угловой скоростью с о За счет вязкости исследуемого вещества относительно вертикальной оси L возникает момент МБ, являющийся функ1щей вязкости и тловой скорости U9 При ш coast MB m;(1) где ) вязкость исследуемог-э аеще-ст- ва. Момент 1Ав передается на гироскоп, вызывая его дроцессшо выходной оси X с угловой скоростью а. , Благодаря процессии гир х;копа возникает гироскопическлй момент Hji i с гремядшйся совместить вектор Н с вектором по кратчайшему пути. Этот гироскопический моьлант действует относитепько оси cL измерительного элемент 15 и направлен по оси у гироскопао Гироскопический момент Мгу противопол жен по направлению моменту Мв и раве. ему по величине, т. е. уравновешивает воз- мущаюший момент. Одновременно с этим, вследствие процес сии гироскопа с угловой скоростью ji , он поворачивается на угол , благодаря чему с датчика угла процессии 27 снимается сиг кал, поступаютяй на усилительное устройство 28 и далее - на компенсируЮ1ц;й двигатель 7. Этот двигатель прикладывает относительно ося L момент МК .... KjJ ; где К передаточнь1й коэффищ1ент тракта датчика угла - усилительное устрой-ство - компенсирующий двигате.дь. Момент Мк также противоположен по знаку моменту Мв, суммарггый момент, ,:ей-ствуюлдай относительно оси А. ., будет My I т - f.lry - Мк М& -HjP. - К (.2) По мере увеличения угла js момент, действующий на гироскоп, уменьшается,, процессия гироскопа замедляется, и наконец, она прекращается. Таким образом, в установившемся режиме Мгу О и момент Мв уравновешивается только моментом Мк компенсирующего двигателя: М к - К ft Mb .(3) Ji л Mb где R - установившееся значение угла jb. С учетом (1) можно записать f Сг). Измеряя величину установившегося зна-чения угла ji , например, при помошя высокочувствительного электрюизмерительного прибора можно определить значения вязкости исследуемого вещества. Процесс установления гироскопа в полохчение, соответствующее (4), происходитза очень мальШ промежуток времени, исчисляемый тысячными долями секунды. Для повьшдения точности измерений применен двухстепенной гироскоп, который обладает наибольшей чувствительностью к изменению момента. Расширение диапазона измерений в предлагаемом устройстве достигается двумя способами; - изменегшем передаточного коэффициента К тракта датчик угла - усилительное устройство - комленсируюший электродвигатель - редуктор {формула 4), за счет изм неШ1я коэффициента усиления усили тельного устройства или изменения передаточного ijic.ia редуктора кo.шeнcиpyюшeгo электродвигателя (либо того и другого вместе}; - заменой г роскола с необходимым кинематическим моментом (Р этом случае достаточно иметь набор сменнык ГИСЮСКОПОБ). двухстепенных Форм у л а. е т е н и я Ротадпснный вискозиметр. содер ;. коаксиальные цилиндры, один из которых соединен с приводньхм дв11гате.леМ; а другой измерительный цилиндр - с устройством для измерения момента, отличающийся- тем, что, с целью расширения диапазона и повышеш1я точности измерения; устройство для измерения момента вьшолнено в виде дв осстепенного гироскопа, корпус которого соединен с измерительным цилиндром, причем входная ось гироскопа совмещена с осью вращения измерительного цилиндра, а на выходной оси гироскопа установлен датчик угла, рот: р которого электрически связан через усилитель с ко.шенсирующи;м двигателем, механически связанным с налом измерительного цилиндра.
Фиг.1

| название | год | авторы | номер документа |
|---|---|---|---|
| Ротационный вискозиметр | 1980 |
|
SU898294A1 |
| Ротационный вискозиметр | 1972 |
|
SU775666A1 |
| Ротационный вискозиметр | 1976 |
|
SU651233A1 |
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| Ротационный вискозиметр | 1977 |
|
SU616561A1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2015 |
|
RU2594628C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| УСТРОЙСТВО ДЛЯ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1840804A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |