(54) ПРИВОД ВАЛКОВ ПРОКАТНОГО СТАНА
тор в другом и их относительная скорость высока, то двигатель высокоскоростной (в системе координат, связанной со статором), а скорость ротора относительно неподвижной (в системе координат, связанной с полом цеха) оси может быть любой и определяться технологическим процессом.
Отсюда видно большое значение правильного выбора системы координат, т. е. электромагнитное взаимодействие ротора и статора определено только их скоростью друг относительно Друга. Поэтому выполнение статоров вращаемыми, установленными в подшипниках и соединенными со стационарными двигателями ренгает задачу обеспечения низкой скорости ротора (и связанного с ним прокатного валка) и высокоскоростного двигателя (высокой скорости ротора относительно статора).
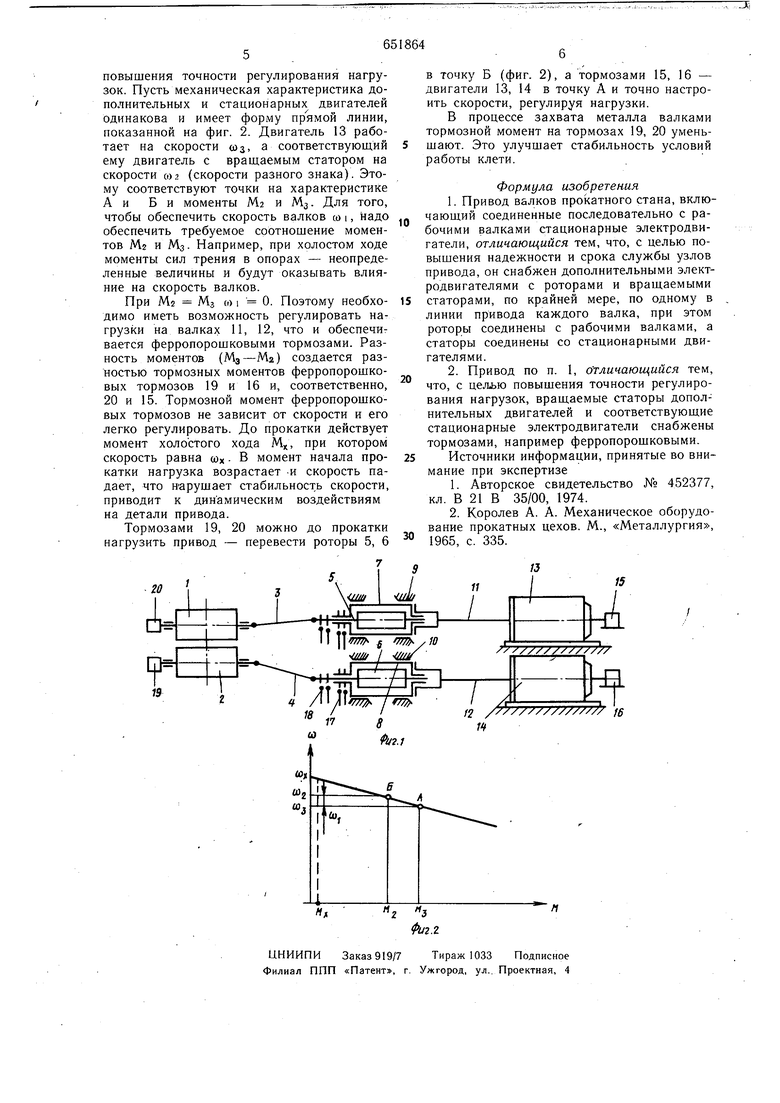
На фиг. 1 показана схема с индивидуальным приводом валков; на фш. 2 - характеристика двигателя.
Рабочие валки 1, 2 универсальными шпинделями 3, 4 соединены с роторами 5, 6 электродвигателей. Статоры 7, 8 этих двигателей выполнены вращаемыми и установлены в подшипниках 9, 10,
Эти статоры валками 11, 12 соединены со стационарными двигателями 13, 14, с которыми соединены ферропоршковые тормоза 15, 16. Электрический ток подведен к статорам через скользящие контакты 17 и к роторам через скользящие контакты 18. Валы роторов 5, 6 соединены с ферропорошковыми тормозами 19 и 20.
Устройство работает следующим образом.
Валки 1, 2 через шниндели 3, 4 приводятся во вран(ение с угловой скоростью со i, определяемой чехиологией прокатки. Такова же скорость роторов 5 и 6 электродвигателей. Статоры 7 и 8 вращаются в подщипниках 9 и 10 с угловой скоростью cos, определяемой их приводом через валы 11, 12 от двигателей 13, 14.
Подвод тока к ротора.м 5, 6 выполнен через скользящие контакты 18, а к статорам 7 и 8 - через скользящие контакты 17. Эти контакты должны быть скользящими, так как в описываемой конструкции стаTOpbi не являются неподвижными, а вращаются со скоростью (О 2 в подшипниках 9 и 10. Двигатели i3, 14 - это обычные электродвигатели с подвижными роторами и неподвижными, стационарными статорами, установленными на фундаменте.
Подшипники статоров 7, 8 можно выполнить в виде опор качения, опор на несколько роликов либо опор скольжения (жидкостного трения)., ... ,
Относительная скорость роторов 5, 6 и, соответственно, статоров 7, 8 равна ыз 0) 1 - со 2, отсюда О) J со г -Ь со з Пусть оба типа двигателей 13, 14 и роторы 5, 6 высокоскоростные, т. е. по общепринятой терминологии их скорость раина 900-1500- я(или выше). Если роторы 5, 6 и статоры 7, 8 вращать в противоположных направлениях- «), соз О, то 001 будет равна
5 разности скоростей статоров 7, 8 и роторов 5, 6,следовательно в данном приводе высокоскоростные двигатели обеспечивают низкую скорость валков.
Если, например, передаточное число от двигателя к валкам равно и надо при скорости двигателя 1500 обеспечить скорость валков, равную , то достаточно вращать двигатели 13, 14 со скоростью 1200-1300-йй1г S одном направлении, а роторы 5, 6 со скоростью
5 в обратном направлении. Тогда относительная скорость скольжения роторов 5, 6 и статоров 7, 8 составит 1500-1600- я-. Если скорость статоров 7, 8 равна 1500- -д-, а скорость роторов 5, 6 относительно статоров 1450- -д- (с противоположным знаком), то в результате скорость валков 1, 2 будет равна 50-|-.
Поскольку роторы 5, 6 низкоскоростные относительно оси вращения, связанной с цехом, то их кинетическая энергия, равная
5 (0,51(0) каждого (I - момент инерции) очень мала, а это существенно снижает динамические нагрузки. Если при передаточном числе, равном 5,0 в приводе известной конструкции с редукторами происходит аварийная остановка валка (или его тор можение при входе проката в валки), то это приводит к упругой деформации кручения трансмиссии и всех деталей привода ротором с большой кинетической энергией. В предлагаемой конструкции ротор высокоскоростной только относительно статора, а относительно цеха он низкоскоростной, его скорость в данном примере меньше в 5 раз, а кинетическая энергия в 25 раз, что очень существенно снижает динамические нагрузки, повышает срок службы и надежность деталей привода.
Приведенный пример не исчерпывает всех вариантов исполнения конструкции. Можно выполнить стан с шестеренной клетью, а не с индивидуальным приводом, или
5 привод с применением редукторов. Допустимо применять многодвигательный привод к валку от нескольких двигателей, принимая последовательную или параллельную схему их расположения. В предлагаемой конструкции можно без применения сложных зубчатых передач или низкоскоростных двигателей значительно понизить (или повысить) скорость валков относительно статоров электродвигателей, Ферропорошковые тормоза 15, 16 на валках вращающихся статоров
(это валы, соединяющие статоры 7, 8 с роторами двигателей 13, 14), и ферропоршковые тормоза 19, 20 в валах, соединенных с роторами 5, 6, обеспечивают возможность
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод валков прокатного стана | 1976 |
|
SU710697A1 |
| Прокатный стан | 1984 |
|
SU1171131A1 |
| СИСТЕМА УПРАВЛЕНИЯ НА ОСНОВЕ ВИНТОВОГО ЗАБОЙНОГО МЕХАНИЗМА | 2013 |
|
RU2617759C2 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2010 |
|
RU2505912C2 |
| ВАЛКОВАЯ МЕЛЬНИЦА | 2008 |
|
RU2481157C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ И МОТОР-РЕДУКТОР | 2013 |
|
RU2554931C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ И МОТОР -РЕДУКТОР | 2009 |
|
RU2520937C2 |
| ПРЯМОЙ ПРИВОД ДЛЯ РОЛИКОВ, ВАЛКОВ И ЛЕБЕДОК В ЧЕРНОЙ И ЦВЕТНОЙ МЕТАЛЛУРГИИ | 2018 |
|
RU2741604C1 |
| РЕВЕРСИВНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2018 |
|
RU2671128C1 |
| Привод прокатного стана | 1984 |
|
SU1217510A1 |
