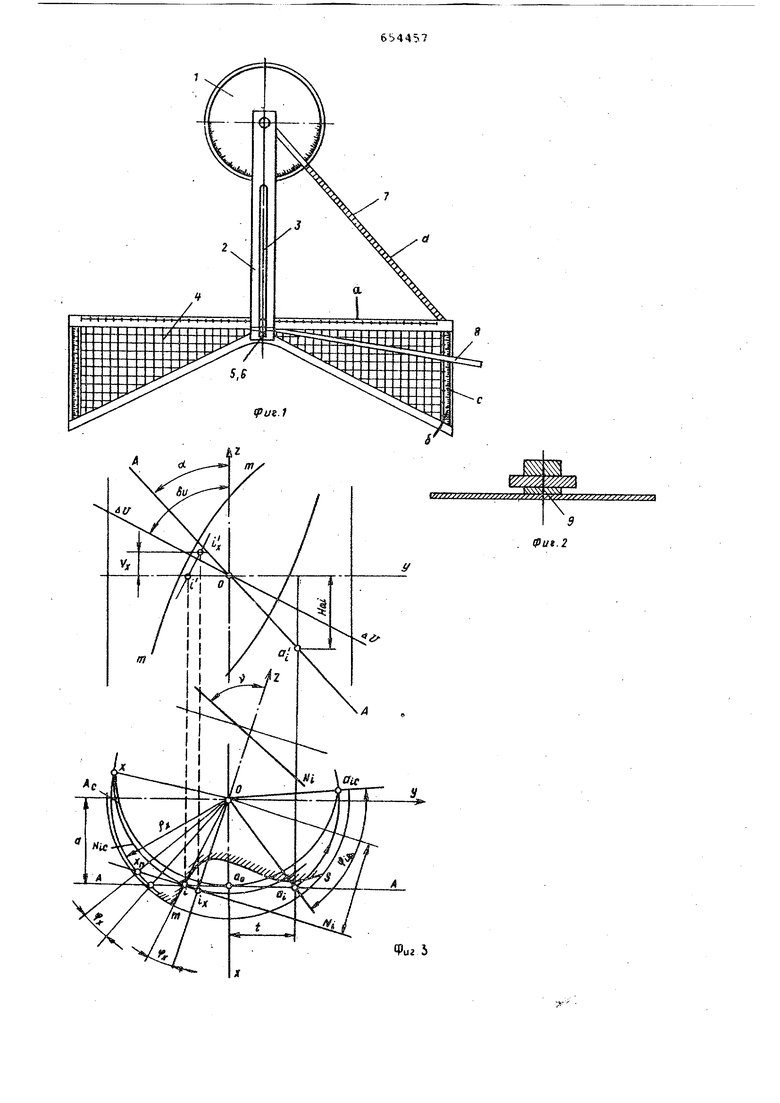
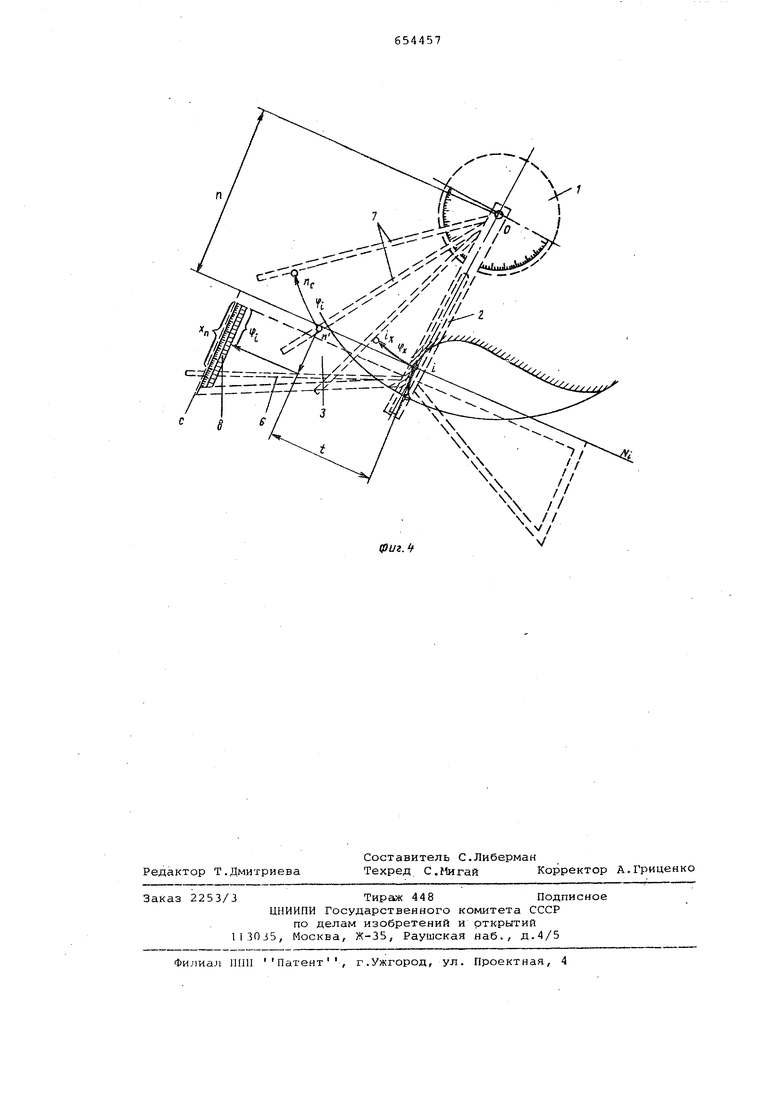
3 Характеристика пЬверхности враще ния опраделяется как геометрическое место таких точек сопряженной винто вой аоверхности, нормали в которых к лосяедней пересекают ось А-А.Ось Аявляется сопряженной с осью поверхности .вращения в отношении кинемати ческого винта, характеризующего заданную винтовую поверхность. Положе ние оси А-А в пространстве определяется углом оС , скрещиванием ее с осью Z винтовой поверхности и расстоянием а ее.от оси Z . Согласн теории винтов они находятся из зави симости а tgSy d tgc (l) , где P - параметр (единичный шаг) ви товой поверхности; ,(3ц и би соответственно расстояни между осью Z и осью поверхности вра щения и угол их скрещивания. Для произвольной точки 1 винтово поверхности, заданной профилем ее га g S в торцовом сечении (фиг.З), т ка tj( характеристики строится следу щим образом. Нормаль Ni в точке t к винтовой поверхности перпендикулярна к торцо вому профилю и как луч винта состав ляет с осью 2 винтовой поверхности угол скрещивания V , определяемый по ф Jpмyлe .Р ntgv {2-) , где п - расстояние между Ni и осью Z Длл нахождения точки характеристики tj необходимо точке 1 вместе с нормалью N1 в ней сообщить такое винтовое перемещение, после которог Ni пересечет прямую А-А. Это перемещение характеризуется поворотом точки i вокруг оси Z на некоторый угол ф и одновременным пос гупательным перемещением вдоль оси Z на рас стояние V Рфх- Для определения зеличины этого перемещения надо построить на координатной плоскостиХО совпадающей с исходным торцовым сечением, следы А1 и Ni, которые оста ляют прямые А-А и Ni и их винтовом движении с параметром Р. Эти следы строятся так. Например, для прямой А-А следом ее произвольной точки а (а;, ) , отстоящей от плоскости XOY на расстоянии Hai (фйзг.З), буде точка aiс,получающаяся поворотом то ки aj. вокруг оси Z на угол т Hai- t -ctg с Ф,- - где t - расстояние на виде в плане {нижняя проекция фиг.З) принятой то ки at. от точки а прямой А-А, находящейся в плоскости XOY. Так как CtgoC - , имеем где tg Ха 71 Аналогичным образом углы (р обходимые для построения точек N1, отстоящих на расстоянии t от точки i, определяются по Формуле ф. t р7 t . tgXn m fr(6). где tg Xn Точка X пересечения построенных следов (фиг.З) предопределяет точку встречи самих А-А и N1. Эта точка соответствует точке Х, на прямой А-А и точке Хп на нормали Ni. Последние являются точками пересечения А-А и N1 окружностью радиуса fy. -ОХ. Угол ijjj;-uXNOXa и является искомым. В связи с этим положение характеристической точки ix для заданной точки i находится следующим образом: на нижней проекции (фиг.З) поворотом точки i на угол ipjj , а на верхней проекции (i ) смещением от плоскости ХОУ на расстояние Vx Р ф , Геометрическое место точек i , найденных таким образом для ряда принятых точек профиля винтовой поверхности, и образует искомую характеристику. Таким образом, главным при определении характеристик является построение следов Ni и А-А в их винтовом движении, что представляет собой трудоемкую операцию при выполнении ее обычными методами начертате ьной геометрии. Для механизации всех указанных построений в целях резкого уменьшения трудоемкости нахождения характеристик и служит предлагаемый прибор. Функции (3) и (5), необходимые для построения следов, быстро определяются с помощью шкал, нанесенных на треугольниках пластины 4 прибора. На миллиметровой шкале а (фиг.1) нанесены расстояния t, на градусной шкале S - искомые углы fi. Работа с помощью прибора выполняется следующим образом (фиг. 4) . На лист Ватмана, на котором вычерчен в большом масштабе торцовый профиль винтовой поверхности, устанавливают прибор осью 9 в точку О проекции оси винтовой поверхности. На за- данном профиле берут произвольную точку 1, проводят в ней нормаль к профилю и находят расстояние п между нормалью и осью винтовой поверхности. По формуле (6) рассчитывают угол Хп (в случае построения Ас рассчитывают угол Ха по формуле (4)). На этот угол Хп устанавливается по шкале С, нанесенной на треугольнике пластин 4 рядом со шкалой S , поворотная линейка 7 и закрепляется в этом положении на весь период построения следа взятой нормали. Линейку 2 прибора и диск 1 поворачивают так относительно оси 9, чтобы ось шкалы а совпала, с нормалью Ni, проведенной на листе ватмана. На нормали Ni задают ряд точек п , отстоящих от точки i на расстояния t, Kaжлo lУ такому отрезку t соответствует угол ф1, который определяется по шкале б (фиг,4) К точке п водводится линейка 8 пут поворота ее вокруг центра прибора оси 9 при неподвижном положении диска I относительно чертежа на ватмане В этом положении по миллиметровой шкале d линейки 8 фиксируется точк п по расстоянию ее от оси винтовой поверхнооти (от точки О). После последующего поворота линейки 8 на найденный угол tf i , осуществляемого по шкале, нанесенной на диске 1, на чертеж ватмана переносится с линейки 8. фиксированная точка п , которая и будет являться следом п точки . ппри винтовом перемещении N1, Выполнив аналогичные операции для других точек п нормали, на чертеже получают ряд точек п, , совокупность которых и образует искомый след Nic (фиг.З). Таким же образом производятся построения следов других нормалей к профилю, а также следа оси А-А, Дальнейшее определение точек характеристики с помощью прибора произ водится так. По шкале поворотной линейки 8 изм ряются расстояния точек X пересечени построенных следов Nic с Ас от центр О, которые и принимаютсяВ качестве значений радиусов р х для окружносте ЦентргшЬные углы (р , соответствующие дугам этих окружностей, заключенным между точками К и Хд пересечения их с проекциями нормали Ni и оси А-А (фиг.З), и измеряемые по шкале диска 1 с помощью линейки 8, и являются искомыми величинами, определяющими то винтовое перемещение каждой из точек i,после которого точка iстано вится точкой ijj искомой характеристи ки.Далее линейка В поворачивается та чтобы линия ее,на которой располагае ся шкала,прошла через точку i.no шка ле линейки фиксируется расстояние т ки i от центра О винтовой поверхност После поворота линейки 8 от этого положения на угол срх, отсчитываемый по шкале диска 1, на чертеж ватмана переносится фиксированное положение точки i с линейки, которое и будет искомой точкой 1, выполнив подобные построения для других точек профиля винтовой поверхности, находят геометрическое место точек i, которое и образует собой искомую характеристику . Верхняя проекция характеристики определяется по найденной нижней путем смещения точек iy от торцовой плоскости на соответствующие расстояния Ptpi (принцип построения показан на фиг.1). Предлагаемый прибор позволяет с высокой производительностью и достаточной точностью определять характеристики сопряженных поверхностей вращения и винтовых поверхностей, необходимые при их профилировании (например, при определении профиля обрабатываемых инструментов и в других случаях). Формула изобретения Прибор для определения характеристик сопряженных поверхностей, содержащий многозвенник, на звеньях которого нанесены шкалы, отличающийся тем, что, с целью обеспечения возможности определения характеристик любой поверхности вращения, сопряженной с произвольной винтовой поверхностью, многозвенник состоит из установленного на оси прозрачного диска, планки с продольным пазом, надетой на ось дискау фигурной пластины, укрепленной на планке с позможностью перестановки вдоль ее паза, и двух поворотных линеек, одна из которых установлена на оси диска, а другая на фигурной пластине, при этом последняя выполнена по форме двух одинаковых и симметрично расположенных прямоугольных треугольников с общей вершиной острого угла, на диске нанесена градусная шкала, а на надетой на ось диска поворотной линейке и вдоль кромок пластины линейные шкалы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 189588, кл. В 43 L И/00, 1964,
%
Фиг. 2
Фиг 5
V
фигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для построения кривых | 1981 |
|
SU988589A1 |
| Чертежный прибор | 1981 |
|
SU977214A1 |
| Чертежный прибор | 1979 |
|
SU859220A1 |
| Дериватор | 1976 |
|
SU610684A1 |
| Прибор для построения сопряженных профилей | 1982 |
|
SU1057323A1 |
| Чертежный прибор | 1990 |
|
SU1750978A1 |
| ОПРЕДЕЛЕНИЯ ТОЧЕК ГРАНИЧНЫХ ЛИНИЙСЕЧЕНИЙ, | 1971 |
|
SU311785A1 |
| Способ контроля конического и гипоидного зубчатого колеса | 1985 |
|
SU1272092A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ | 1990 |
|
RU2028667C1 |
| Способ обработки резанием циклоидальных поверхностей | 1985 |
|
SU1337202A1 |