1
Изобретение относится к транспортным устройствам, предназначенным для транспортировки отдельных изделий, в частности газет.
Известны устройства для с огласования скоростей приводов, например конвейерных, при передаче преимущественно изделий печати с подающего конвейера на принимающий, снабженный захватами, содержащие тахогенераторы, сопряженные с приводами, датчики положения, частотный и фазовый регуляторы скорости приводов
недостаткам относится неравномерность подачи изделий.
С целью обеспечения равномерной подачи изделий с одного конвейера на другой тахогенераторы соединены с входом частотного регулятора, причем последний выполнен интегральным и соединен своим входом с выходом фазового регулятора, выдающего поляризованпый сигнал фазовой погрещности между импульсами, поступающими от соединенных с его входами соответственно датчиков положения захвата и положения изделия печати.
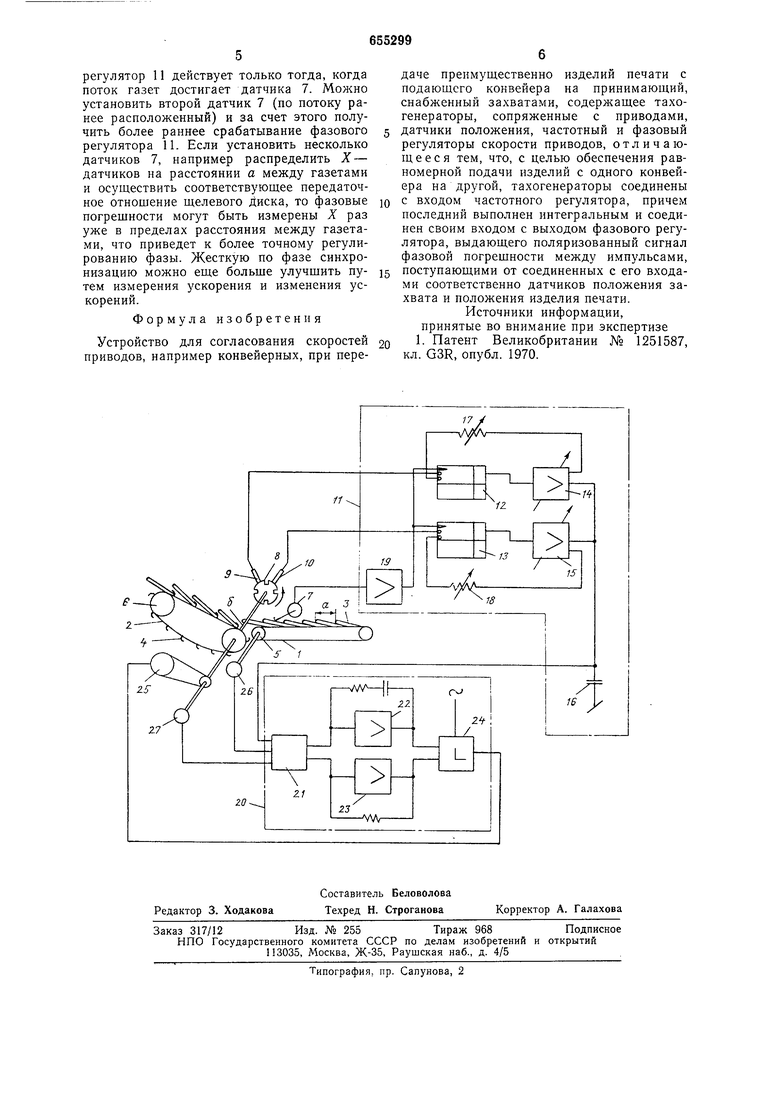
На чертеже представлена блок-схема предлагаемого устройства для согласования скоростей приводов, например конвейерных, при передаче преимущественно изделий печати с подающего конвейера 1 на принимающий конвейер 2.
Иа конвейер 1 поступает поток отдельных изделий, например газет от обрабатыГ аюп1ей мащины (на чертеже не показана). Газеты 3, перемеп1аемьте подающим конвейером 1, передаются в месте перегрузки
па принимаюп;ий конвейер 2, снабженный захватами 4, который транспортирует их дальше к другой машине (на чертеже не показана). Г1одаюп1пй конвейер 1 имеет направляющие ролики 5, причем минимум
один из этих роликов 5 имеет электропривод (на чертеже не показан). Принимающий конвейер 2 имеет направляющие ролики 6. Скорость подающего конвейера 1 отрегулирована в зависимости от количества
поступающих газет в единицу времени. Однако скорость одновременно выбирается таким образом, чтобы последовательно поступающие газеты образовывали непрерывный поток каскадного типа (с укладкой
внахлест), причем расстояние а задних кромок двух идуошх друг за другом газет следует по возможности выдерживать постоянным. Скорость принимающего конвейера
2, который установлен вслед за первым, должна быть выбрана таким образом, чтобы в месте передачи б был подготовлен захват в тот момент, когда газета поступит к этому месту передачи. Необходимое согласование движений достигается с помощью блок-схемы, включающей датчик 7, выполненный в виде рычага, который определяет ноложение отдельных газет, находящихся на конвейере 1, щелевой диск 8, положения которого определяют два чувствительных элемента 9 и 10. Щелевой диск 8 жестко соединен с вращающимся роликом 6 и снабжен таким количеством щелей по своей окружности, сколько захватов проходит мимо места передачи б в течение одного оборота ролика 6. Чувствительные элементы 9 и 10 могут быть выполнены в виде электрических контактов, приводимых в действие щелевым диском 8, причем эти контакты замыкаются последовательно во времени. Фазовый регулятор И включает два блока 12, 13 формирования импульсов, входы блоков 12, 13 связаны с чувствительными элементами 9, 10 соответственно, а их выходы через генераторы 14, 15 тока подсоединены к общему конденсатору 16. Часть выходного тока генератора 14 и генератора 15 возвращается обратно через сопротивления 17, 18 обратной связи в блоки 12 или 13 формирования импульсов. Фазовый регулятор И содержит также усилитель 19, связанный по входу с датчиком 7. Выход усилителя 19 образует третий вход для блоков 12, 13 формирования импульсов. Выход фазового регулятора подается на один из входов частотного регулятора 20, включающего суммирующий блок 21, интегральный усилитель 22, пропорциональный усилитель 23, блок питания 24, выход которого связан с электродвигателем 25 таким образом, что достигается пропорциональное регулирование (усилитель 23) и одновременно интегральное регулирование (усилитель 22) электродвигателя 25. Второй вход частотного регулятора соединен с тахометрическим генератором 26, а третий вход - с тахометрическим генератором 27.
Устройство работает следующим образом.
Посредством фазового регулятора 11 определяется местное положение передаваемой газеты из потока газет и производится сравнение с положением того или иного захвата на принимающем конвейере 2 так, что для каждой газеты подается захват 4 в определенной точке передачи с некоторыми допустимыми отклонениями (±20% от расстояния между отдельными газетами) в пределах общего диапазона регулирования частотного регулятора 20. Частотный регулятор должен обрабатывать сигналы, определяющие среднюю скорость потока газет в сочетании с сигналами средней скорости
захвата 4. Обе скорости или оба соответствующие числа оборотов могут быть измерены непрерывно или дискретно. Положение газеты, а также захвата 4 определяется дискретно: положение газеты - с помощью датчика 7, положение захвата 4 - с помощью щелевого диска 8 и двух чувствительных элементов 9, 10. Датчик 7 определяет заднюю кромку газеты, при этом
возникает электрический импульс, передний фронт которого оценивается дискретно. Щель в диске 8 соответствует одному захвату 4 и его доля на окружности - улавливаемой фазовой погрешности. Диск должен
иметь столько щелей, сколько захватов
проходит мимо неподвижной точки передачи
газет с одного конвейера на другой в течение одного оборота этого диска. Только
одна щель в диске создавала бы максимальное разрешение (разрешающую способность), и тогда диск делал бы один оборот между двумя захватами. Чувствительный элемент 9, который первый проходит перед щелью диска по направлению движения, подготавливает коррекцию на большее число оборотов, другой чувствительный элемент 10 - для меньшего числа оборотов. Если край датчика 7 газет появляется в тот момент, когда щель диска 8 проходит
мимо чувствительного элемента, то будет дан корректирующий импульс определенной длительности, например около 20 мс, о минимальной фазовой погрешности в пределах всего диапазона работы регулятора
20, т. е. при чувствительном элементе 9 - на большее число оборотов, при чувствительном элементе 10 - на меньшее число оборотов. При увеличении фазовой погрешности пропорционально возрастает длительность
корректирующего импульса. Под действием корректирующего импульса в зависимости от математического знака фазовой погрешности включается положительный или отрицательный ток (генератор 14 или 15), которые линейно заряжают или разряжают конденсатор 16. В результате этого возникает поляризованное напряжение коррекции, которое подается теперь к частотному регулятору 20. Как только возникает минимальпая фазовая погрешность, щель диска 8, вращаемого электродвигателем 25, колеблется в пределах зоны нечувствительности в соответствии с постоянной времени всей системы регулирования. Зона нечувствительности определяется в основном расстоянием между двумя чувствительными элементами 9 и 10. Генераторы 14 и 15 тока и обратную связь для корректирующих сигналов (сопротивления 17 и 18) можно
регулировать, благодаря этому можно оптимально настроить фазовый регулятор И в зависимости от скорости перемещения ленты конвейера 2. Одновременно с началом работы (с пуском газетной машины) начинает работать регулятор 20, фазовый же
регулятор 11 действует только тогда, когда поток газет достигает датчика 7. установить второй датчик 7 (по потоку ранее расположенный) и за счет этого получить более раннее срабатывание фазового регулятора 11. Если установить несколько датчиков 7, например распределить X - датчиков на расстоянии а между газетами и осуществить соответствующее передаточное отношение щелевого диска, то фазовые погрешности могут быть измерены X раз уже в пределах расстояния между газетами, что приведет к более точному регулированию фазы. Жесткую по фазе синхронизацию можно еще больще улучшить путем измерения ускорения и изменения ускорений.
Формула изобретения
Устройство для согласования скоростей приводов, например конвейерных, при передаче преимущественно изделий печати с подающего конвейера на принимающий, снабженный захватами, содержащее тахогенераторы, сопряженные с приводами, датчики положения, частотный и фазовый регуляторы скорости приводов, отличающееся тем, что, с целью обеспечения равномерной подачи изделий с одного конвейера на другой, тахогенераторы соединены с входом частотного регулятора, причем последний выполнен интегральным и соединен своим входом с выходом фазового регулятора, выдающего поляризованный сигнал фазовой погрешности между импульсами, поступающими от соединенных с его входами соответственно датчиков положения захвата и положения изделия печати. Источники информации, принятые во внимание при экспертизе 1. Патент Великобритании № 1251587, кл. G3R, опубл. 1970.