I
Изобретение относится к области автоматики и вычислительной техники, в частности к тренажерной технике, и может быть использовано при обучении операторов систем управления.
Одно из известных устройств для оценки профессиональной пригодности операторов систем управления содержит пульт оператора, блок определения величин ошибок, блок сравнения, блок индикации, модель объекта тренировок 1.
Указанное устройство позволяет оценивать отдельные действия оператора и имеет низкую точность оценки операторов систем управлений.
Наиболее близким техническим решением к настоящему изобретению является устройство для оценки профессиональной пригодности операторов систем управления, содержащее пульт оператора, подключенный через первый блок совпадения к блоку определения величины ошибок, который через второй блок совпадения соединен со входом устройства и непосредственно - с первым входом блока сравнения, второй вход которого подключен к блоку ввода эталонов, блок синхронизации, соединенный с первым и вторым блоками совпадения и с блоком фиксации аварийных ситуаций, который подключен к пульту оператора, блоку определения величины ошибок, блоку задания предельных величин ошибок и блоку индикации 2.
Недостатком известного устройства является то, что оно не дает возможности получить оценку действий оператора за произвольный промежуток времени, т.е. в тех случаях, когда процесс управления заканчивается по инициативе обучаемого при достижении им требуемой точности. Необходимость получения такой оценки возникает, например, при решении оператором задачи сопровождения объекта на экране индикатора. В известном устройстве фиксируются лишь результаты последовательного сравнения величины средней ошибки слежения с уровнями нормативов. Кроме того, в этом устройстве не вырабатывается оценка результатов обучения по нескольким тренировкам, характеризующая уровень подготовленности данного оператора.
Целью настоящего изобретения является повышение точности устройства при отработке навыка слежения за движущимся объектом, что достигается путем формирования предлагаемым устройством текущей оценки действий оператора за произвольный интервал обучения и оценки уровня его натренированности с учетом всех предыдущих учений с выдачей результатов оценки как самому оператору, так и руководителю обучения.
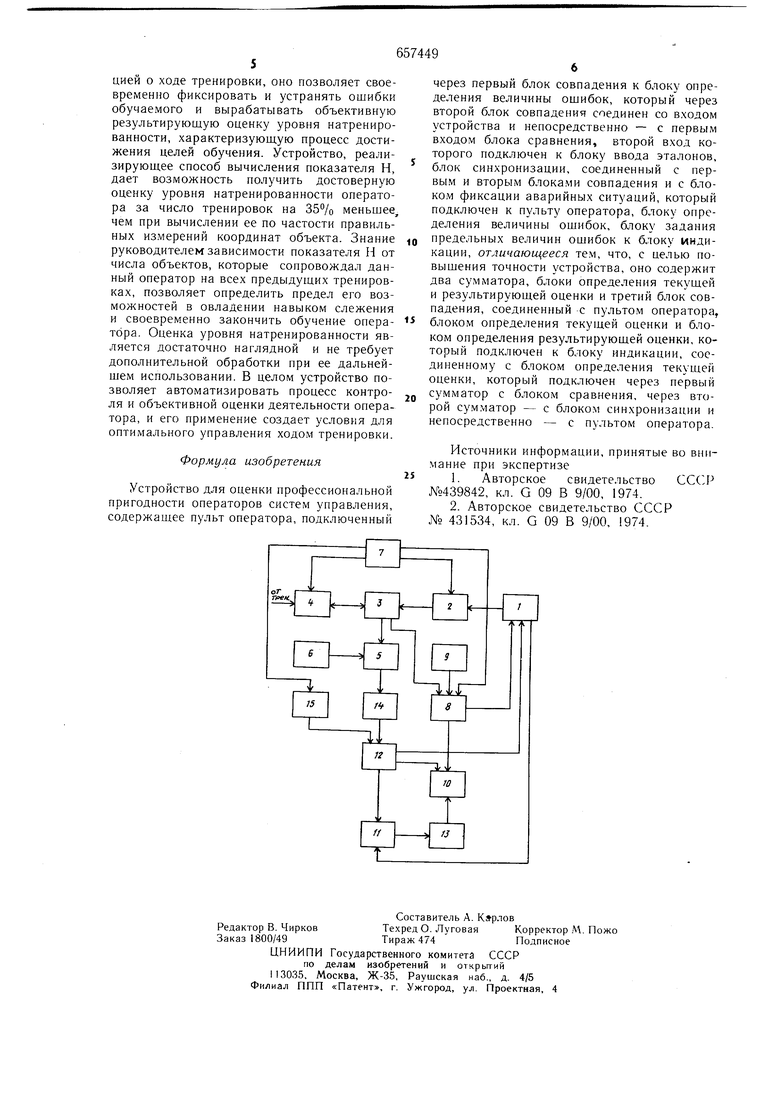
Указанная цель достигается тем, что устройство содержит два сумматора, блоки определения текущей и результирующей оценки и третий блок совпадения, соединенный с цультом оператора, блоком определения текущей оценки и блоком определения результирующей oueiiKH, который подключен к блоку индикации, соединенному с блоком определения текущей оценки, который подключен через первый сумматор с блоком сравнения, через второй сумматор ----- с блоком синхро - изации и |;еп;)С 1едствен о -- с оператора.
Устройство для ,енки нрофессиональной пригодности операторов систем у1;равления схематически изображе.ио на чертеже и содержпт пульт 1 огератора, подключсинный через первый блок 2 совпадении к б. 3 опреде. вс.аичины ошибок 3, который через второй блок 4 совпадении соединен со входом устройства и непосредстзе1-;но - с первым входо,м блока 5 сравнения,второй вход KOTopoio подключен к блоку 6 ввода эталонов, блок 7 синхрон1- зации, соединенный с ие)вым 2 и вторым 4 блоками совпадения и с блоком 8 фиксации аварийных ситуаций, которьгй подклЕОчен к пу.льту I оператора, 6;ioKV 3 о 1ределения Езеличины о нибок, б.локу 9 задания предельных величин ошибок и блоку 10 индикации, третий блбк 1 1 совпадения, соединс-нный с пультом 1 оператора, блоком 12 определения теку1цей оценки и блоко.м 3 определения результирующей оценки, который нодключсн к блоку 10 индикации, соединенному с блоком 12 определения текущей оценки, который иодключе; через первый сумматор М с блоком 5 сравнения, через второй сумматор 15 с блоком 7 синхронизации и еиосредствепно ----- е пультом оператора 1.
Устройство для оценки профессиональной пригодности операторов систем управления работает следующ м образом.
По командам блока 7 открываются блоки совпадения 2 и 4, при этом в блок 3 определения величины вводятся сигналы, соответственно пропорциональные значениям координат объекта слежения, выработанных системой имитации тренажера, и величинам, полученным в результате работы оператора за пультом . 8 блоке 3 определения величин) ошибок вырабатываются сигналы, пропорциональные разности поступивщих в пего величии. Эти сигналы сравниваются в блоке 5 с допустимой ощибкой измерения координат, которая вводится в виде уровня норматива из блока 6. Сигнал на выходе
блока 5 сравнения вырабатывается в случае, если величина ощибки меньше допустимой. Этот сигнал поступает в су.мматорт 14, величина на выходе которого пропорциональ}ia числу правильных измерений. Величина, пропорциональная общему числу из.мерений, вырабатывается в су.мматоре 15. Определение текущей оценки дейс1вий оператора осуществляется в б.токе 12, в который поступают сигналы с выходов сумматоров 14 и 15. Оценка вычисляется как частость правильных измерений и характеризует величину вероятности Р выполнения оператором задачи сопровождения объекта по каждой координате. По каждому сопровождаемому объекту вычисление осуществляется многократно, и результат его поступает на блок 10 индикации пульта руководителя и пульт оператора .
Кроме того, значения этой оценки, полученные данным оператором при сопровождении им всех предшествующих объектов и зафиксированные на момент окончания ручного сопровождения очередного объекта, используются в дальнейшем для расчета показателя уровня натренированности данного оператора Н. Этот показатель определяется в блоке 13 определения результирующей оценки как вероятность того, что величина отклонения вероятности выполнения задачи соировождения от максимально возможной, равной 1, не превышает заданной величины.
Величина отклонения вероятности поступает в блок 13 определения результирующей оценки из блока 12 определения текущей оценки через третий блок 11 совпадения, который открывается сигнало.м о переходе в авто.матический режим сопровождения, поступающим с пульта оператора 1. В блоке 13 определения результирующей оценки опреде. яются и запоминаются величины отклонений для всех объектов, с которьгми работал оператор, и производится расчет показателя Н.
С вы.хода блока 13 значения показателя уровня натренированности оператора Н поступают ца блок 10 индикации пульта руководителя, где осуществляется также их регистрация.
Если сигнал ошибки на выходе блока 3 определения величины ошибок больше предельного значения, поступающего из блока 9 задания предельных величин ошибок, то он проходит через блок 8 фиксации аварийных ситуаций на пульт 1 оператора и блок 10 индикации, где фиксируется превышение ошибкой измерения координат предельного отклонения, т.е. грубая ошибка действий оиератора.
Предлагаемое устройство может е высокой степенью эффективности использоваться для обучения и тренировки операторов при отработке навыка слежения за динамическим объектом. С его помощью руководитель обучения обеспечивается текущей инфор.ма

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки профессиональной пригодности оператора ручной системы управления | 1982 |
|
SU1061171A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1138821A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| Тренажер оператора локационных станций | 1982 |
|
SU1072086A2 |
| Способ посадки воздушных судов при помощи посадочного радиолокатора | 2021 |
|
RU2780735C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| Посадочный радиолокатор | 2021 |
|
RU2779294C1 |
| Устройство для оценки профессиональной пригодности оператора автоматизированной системы управления | 1982 |
|
SU1068975A2 |
