Изобретение относится к грузоподъемным устройствам, а именно к подъемникам телескопического типа.
Известен телескогоетеский подъемник, содержащий соосно расположенные подвижную и неподвижную трубы и приводные вингы с ходовыми гайками . 1.
Однако такой подъемш{к телескошйеского типа не позволяет получить большого рабочего хода при наиметишх габаритах конструкщ1п, так как длины винтов и шлицевого вала, определяющие габариты конструкции, имеют длину несколько большую хода подьем1щка, Конструкдая подъемника телескопического типа не позволяет осутдествить рав1юмериое распределение нагрузки на винты, что при большой грузопод1 емности подъемЕШка не обеспечивает безопасной работы и не предусматривает ст1эахующее устройство па случай среза резьбь в гайках или винтах.
Целью изобретения является увелвдение рабочего хода подъемника.
Дпя этого пртрдные винты снабжены траверсой, на которой смонтированы привод и дополнительные вкнтъ, при этом приводльш и дополнительные винты снабжены страхующими гайками, а страхующие гайки приводных винтов взаимосвяздны с ходовыми гайками посредством подпружиненных пальдев.
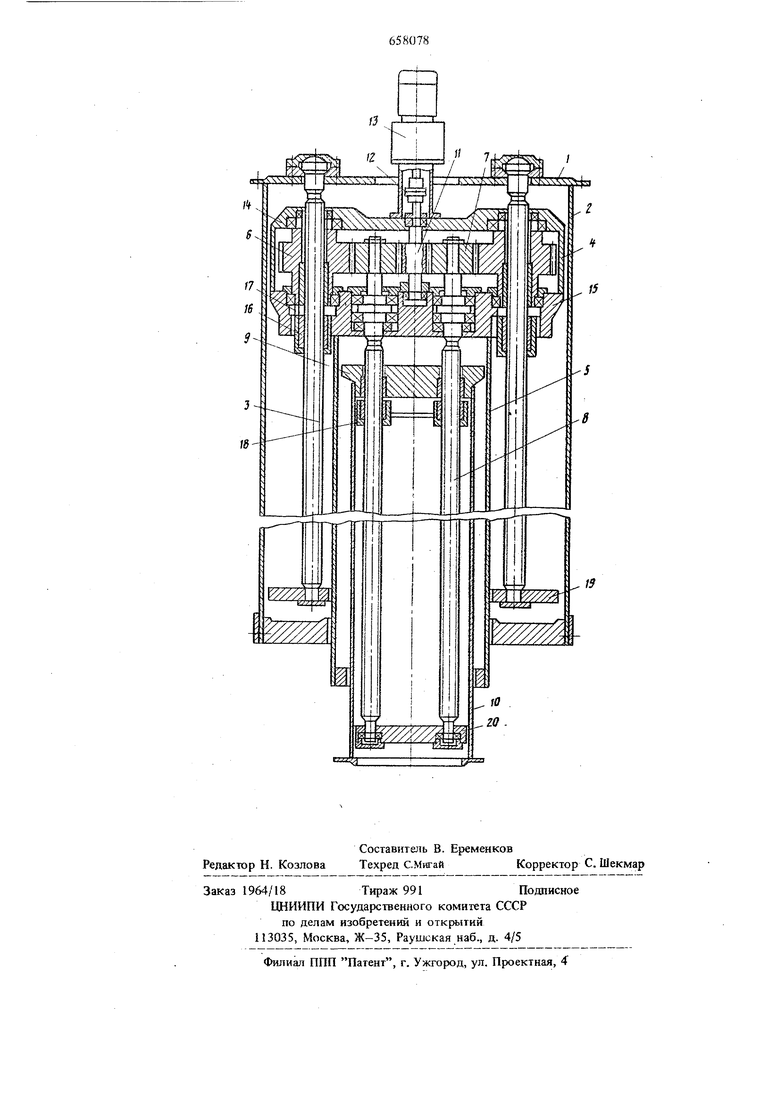
На чертеже показан подъемник телескопического типа, общий вид.
Подъемник телескопического тшта смонтирован на планшайбе 1, на которой также закреплен неподвижный кожух 2. На планшайбе 1 шарнирно закреплены два непо.щзижпых ходовых винта 3 второй ступени, кинемат иески связанШз1х с перемещающимся электромеханическим приводом 4 п направляющей 5, зубчатыми гайками 6, зубчатыми колесами 7 и подвижными ходовыми винтами 8 первой ступени, сопряженных с корпусом 9 и подвеской 10 первой ступени.
Одновременно зубчатьш колеса 7 взаимосвязаны с вагыпестерней 11, муфтой 12 с моторредуктором 13, присоединенш11М к 14 электромеханического пр1шода. 4. На неподвижных винтах 3 в окнах корпуса 15 электромеха1шческого привода 4 установлены с зазором перемещающиеся страхующ} е гайки 16, взаимосвязанные с зубчатыми гайками 6 при помощи паль цев 17, а перемещающаяся страхующая ганка 18 устанавливается с зазором на ходовые винты 8 за корпусом 9. Нижние концы неподвижных 3 и подвижных 8винтов связаны фланцами 19 и 20. Подъемник работает следующим образом. Мотор-редзостор 13 передает вращение через муфту 12, вал-шестерню 11, кинематически связанную с двумя подвижными ходовыми винтами 8 первой ступени посредством зубчатых колес 7, сопряженных с винтами 8 щлицевым соединением. При вращении винты 8 перемещают корпус 9с подвеской 10 первой ступени по внутренней поверхности подвижной направляющей 5 второй ступени, прикрепленной к корпусу 9 электромеханического привода 4. Вместе с корпусом 9 и подвеской 10 первой ступени перемещается электромеханический привод 4 с направляющей 5 второй ступени по двум неподвижным ходовым винтам 3 второй ступени относительно внутренней поверхности неподвижного кожуха 2, присоединенного к планщайбе 1. Одновременное перемещение второй ступени осуществляется через взаимосвязь зубчатых гаек 6 4 6 в электромеханическом приводе 4. Страхующие гайки 16 второй ступени устанавливаются в окнах корпуса 15 с зазором и перемещаются без нагрузки по неподвижным ходовым винтам 3 при помощи связи с зубчатыми гайками 6 через пальцы 17, а перемещающаяся страхующая гайка 18 первой ступени устанавливается с зазором на ходовые винть$ 8 ниже корпуса 9. Формула изобретения Телескопический подъемник, содержащий соосно расположённые подвижную и неподвижную трубы и пр1тодные винты с ходовыми гайками, отличающийся тем, что, с целью увеличения рабочего хоДа, Приводные винты снабжены траверсой, на которой смонтированы привод и дополнительные винты, при зтом приводные и дополнительные винты снабжены страхующими гайками, а страхующие гайки приводных винтов взаимосвязаны с ходовыми гайками посредством подпружиненных пальцев. Источники информации, принятые во.внимание при экспертизе 1. Авторское свидетельство СССР № 498157, -ют. В 25 Т 19/00, 11. 09. 1974.
ti2Sg
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |
| Устройство для подъема груза | 1990 |
|
SU1794884A1 |
| Привод подъемника для вертикального перемещения тяжеловесных конструкций | 1978 |
|
SU747808A1 |
| СТАНОК ПЛОСКОШЛИФОВАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 1994 |
|
RU2080237C1 |
| Устройство для винтового перемещения круглых заготовок | 1978 |
|
SU787149A2 |
| Машина для сварки трением | 1987 |
|
SU1579688A1 |
| Разрывная машина для испытания материалов | 1981 |
|
SU954848A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| ВИНТОВОЙ ПОДЪЕМНИК | 2010 |
|
RU2459763C1 |
| ЗАМОК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2229007C1 |