1
Изобретение относится к грузоподъемньм устройствам, а именно к подъемникам, используемым для введения и удаления в полость корпуса атомного реактора кабины с биологичес- 5 кой защитой и набором инструмента.
Известен привод подъемника для вертикального перемещения тяжеловесных- конструкций, содержащий приводные ходовые винты, взаимодействующие Ю с маточными гайками, соединенными. с грузовой траверсой, несущей пальцы, взаимодействующие с пазами перемещаемого груза, и силовые цилиндры разгрузки маточных гаек fl. 15
Недостатком такого привода является наличие холостого хода подвижной траверсы, равного рабочему ходу кабины. Поэтому время пребывания персонала в активной зоне реактора 20 значительно.
Целью изобретения является повышение эффективности работы привода за счет йск.пючения холостых ходов 25 и повышения скорости вертикального перемещения груза.
Для этого предлагаемый привод снабжен дополнительной траверсой, несущей запирающие.пальцы и смонти- 30
рованный на ходовых винтах, которые выполнены двухпоточнь1ми, при этом цилиндры выполнены двухпоршневыми и снабжены обратными клапанами, установленными на их нижних поршнях.
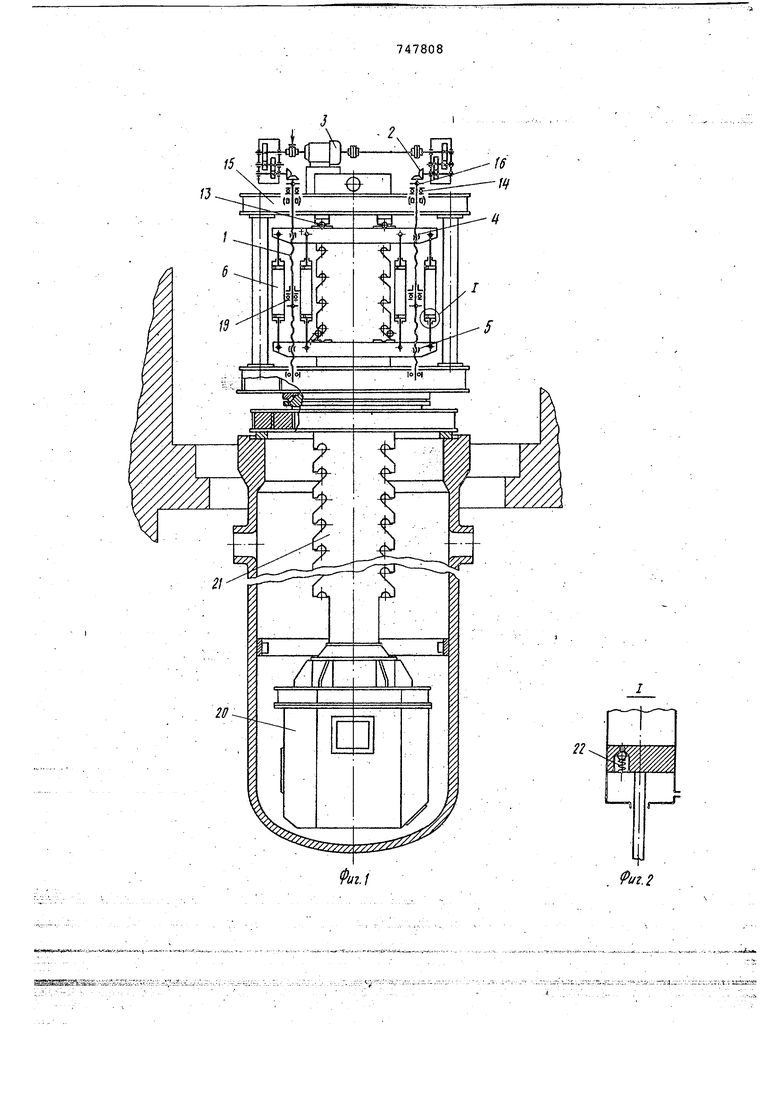
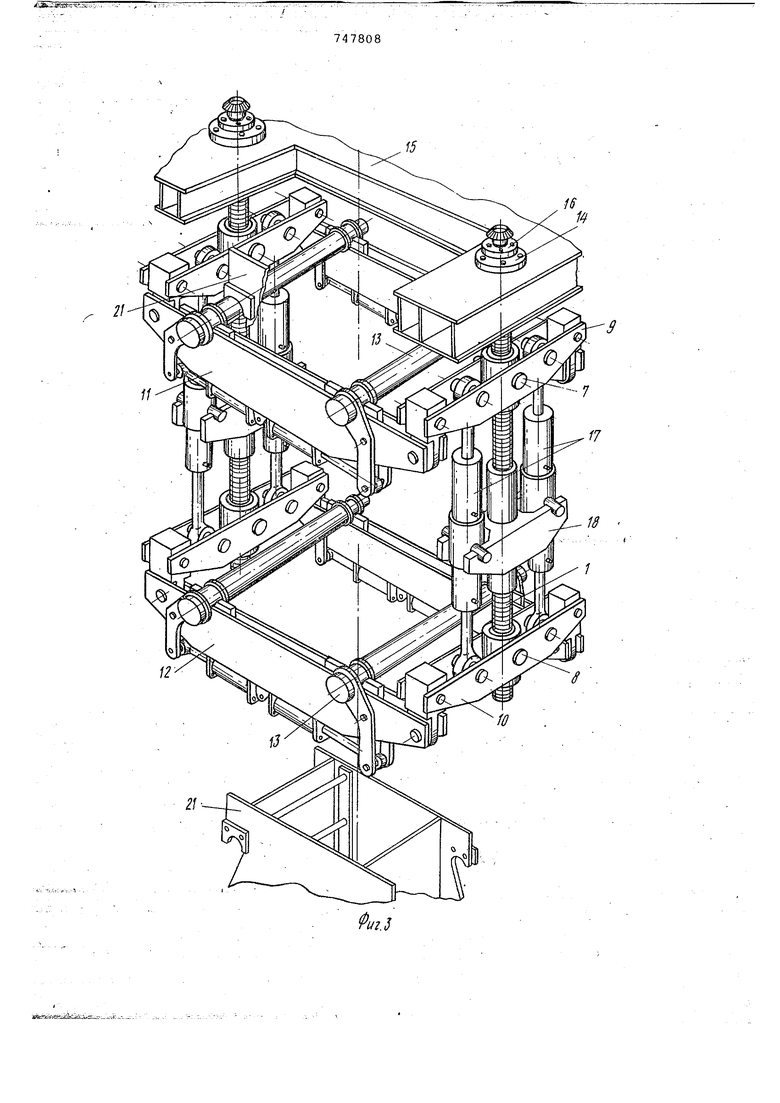
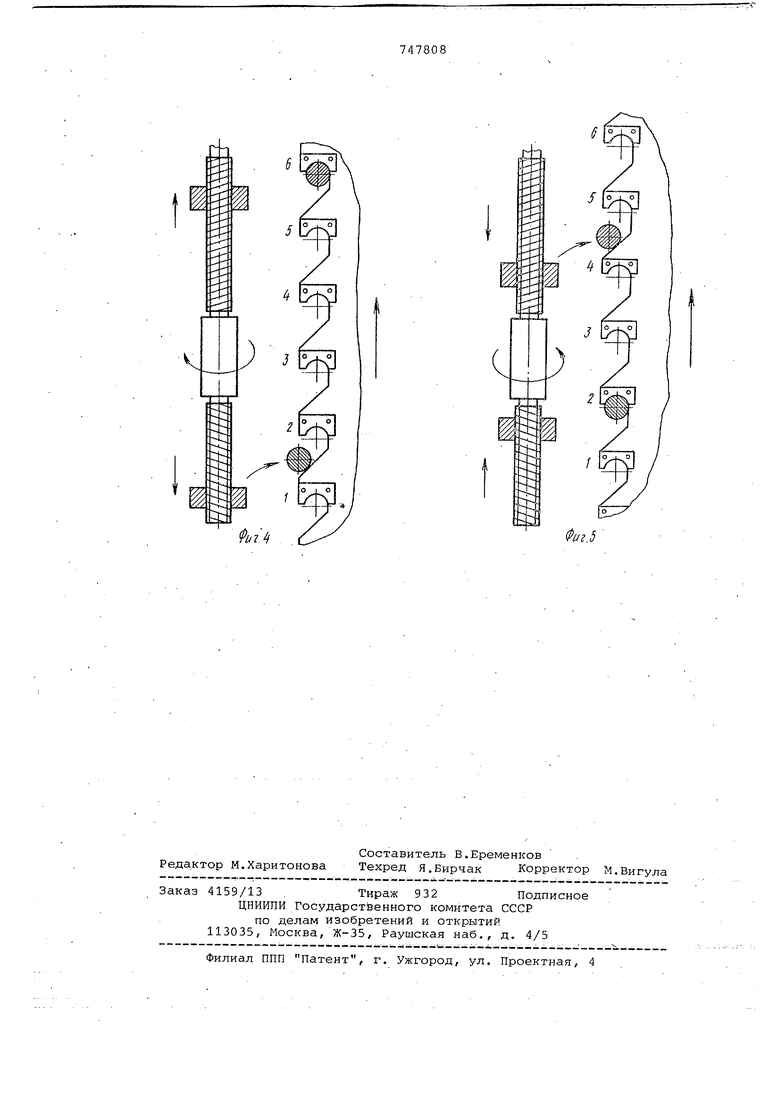
На фиг. 1 представлена кинематическая схема пре.цлагаемого привода подъемника; на фиг. 2 - силовой цилиндр, узел на фиг. 1; на фиг. 3 - привод, общий вид/ на фиг. 4 - порядок взаимодействия запирающих пальцев с пазами перемещаемого грузаj на фиг. 5 - положение гаек и запирающих пальцев после очередного перемещения кабины.
Ходовые винты 1 зубчатой передачей 2 связаны с электродвигателем 3. Винты выполнены двухпоточными с участками правой и левой резьбы и с уста.новленными на этих участках маточными гайками 4 и 5.образуют винтовой механизм, в котором маточные гайки перемещаются синфазно. Симметрично каждому из винтов расположены двухпоршневые силовые гидроцилиндры 6, штоКи которых связаны с цапфами 7 и 8 маточных гаек 4 и 5 через верхнюю и нижнюю йоперечины 9 и 10, которые, в свою очередь, шарнирно связаны с продольными качающимися балками 11
|й 12. Поперечины 9 и 10 и качающиеся балки 11 и 12 с запирающими пальца.ми 13, образуют вертикально-подвижныё траверсы. Ходовые винты, работающие на растяжение , продеты верхними концами через гнезда упор: ых подшипников 14, установленных на раме 15, изакрыты грузовыми гайками 16. Корпусы 17 гидроцилиндров вывешены на цапфах, опирающихся на балку 18, которая смонтирована посредством опорных подшипников 19 на винтах 1.
Работает привод следующим образом При вывешенной на запирающих пальцах 13 верхней траверсы .кабины20 и лазе 21 в гидроцилиндрах б. создают (Гидравлический подпор, близкий по величине к максимальной нагрузке от веса кабины и Лаза.
Чтобы исключить усилие на:пЬра на нижнюю гайку 5, давление рабочей
среда в поршневой и штоковой полостях нижнего поршня гидроцилиндЁ)ОВ б уравновешййаётсячерезобратной клапан 22. Обратный-клапан, размещенный в нижнем, поршне силовых цилиндро позволяет создавать гидравлический подпор только на той из маточных
Таек, траверса которой несет в данный момент нагрузку. Далее включают электродвигатель 3, что вызывает вращение ходовых винтов 1, а следовательно вертикальное перемещение ма:точных гаек4 и 5. При этом гайки 4 и 5 перемещаются в направ-i лениях. - .
На фиг. 3 показано положение гаек и запирающих пальцев, принадлежащих соответственно верхней и нижней балкам...-..
После перемещения кабины с лазом вверх включают реверс электроДвИга теля 3, гайки 4 и 5 перемещаются в направлений одна к другой, при этом запирающие пальцы 13 нижней балки 12 входят в пазы, лаза, с.нимая нагрузку с запирающих пальцев верхней балки 11. Одновременно создается давление в штоковой полости нижнего поршня
747808
гидроцйлиндров б, а подача давления в поршневую полость цилиндров прекращается и переключается на слив.
Перемещение кабины с лазом повторяется. . - .
Имеющийся во время перемещения груза гидррподпор, разгружающий ходовые гайки 4 и 5 от осевой нагрузки уменьшает трение в резьбе и, следовательно, их износ.
При нарушении работы винтового механизма вес перемещаемой конструкции воспринимается гидроцилиндрами, которы.е играю.т роль страхующих элементов., -
Регулируя величину гидравлическог подпора, можно менять грузоподъемность привода.
Таким образом, вертикальное перемещение груза производится при любом направлении перемещения маточных гаек, а сам привод подъемника не имеет
ХОЛОСТЫХ ХОДов.
Формула изобретения
Привод подъемника для вертикального перемещения тяжеловесных конструкций, содержащий приводные ходовые винты , вза имодействующие с маточными гайками, соединенными с грузовой траверсой, несущей Пальцы, взаимодействующие, с пазами перемещаемого груза, и силовые цилиндры разгрузки . . маточных гаек, отличающийс я Тем, что,, с целью повышения эффективности, он снабжен дополнительной траверсой, несущей запирающие пальцы и с.монтированной на ходовых винтах, которые выполнены двухпоточнымй, при этом цилиндры выполнены Двухпоршневыми и снабжены обратными клапанами , установленными на их нижних поршнях. ..
Источники информации,. принятые вовнимание при экспертизе
X 1. Авторское свидетельство СССР №614021, кл. В 66 F 7/10, 1976 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подъемника | 1976 |
|
SU614021A1 |
| Подъемник | 1986 |
|
SU1323524A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| ГРУЗОВОЙ ПОДЪЕМНИК | 2001 |
|
RU2210525C1 |
| Судовой (корабельный) подъемник с одновинтовым приводом | 2018 |
|
RU2691561C1 |
| ВЕРТИКАЛЬНЫЙ ПОДЪЕМНИК ДЛЯ ЛИЦ С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2003 |
|
RU2234451C1 |
| Винтовой подъемник | 1988 |
|
SU1627502A1 |
| ГИДРОПОДЪЕМНИК для ПЕРЕМЕЩЕНИЯ ПЕРЕКРЫТИЙ МНОГОЭТАЖНЫХ ЗДАНИЙ И КРУПНОГАБАРИТНЫХ | 1964 |
|
SU164424A1 |
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
| НО-ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ | 1969 |
|
SU232770A1 |
.
15
13
.2
g ГДV:- -;JД V-..- .;.; .-.-.V -,. :
