Изобретение относится к подъемно- транспортному машиностроению, а именно к грузовым подъемным механизмам для перемещения грузов и установки их в обусловленное место, и может быть использовано в любой отрасли народного хозяйства при автоматизации монтажно-сборочных работ.
Известен винтовой подъемник, применяемый, в основном, для подъемно-транс- портных операций и содержащий ходовой винт и траверсу с гайкой сферической формы, которая закреплена в траверсе.
. Известен телескопический подъемник, содержащий планшайбу с шарнирно закрепленными на ней двумя неподвижными ходовыми винтами, кинематически связанными с перемещающимся электромеханическим приводом и направляющей..
Наиболее близким по технической сущности (прототип) предложенному решению является телескопический подъемник, содержащий основание, на котором закреплены телескопические направляющие с
секциями, внутри которых размещен телескопический винт.
Недостатком указанного подъемника является возможность возникновения аварийной ситуации при ограниченном контро- лё при проведении.операции установки груза в установочное место подъемником.
Целью изобретения является предотвращение аварийных ситуаций при выполнении операций по установке грузов.
Поставленная цель достигается за счет того, что привод подъемника снабжен управляемой муфтой, например,фрикционной сцепной дисковой, выполненной с возможностью компенсации продольного перемещения исполнительного органа (телескопического винта), вал которого оснащен подпружиненной планшайбой, а полумуфта, расположенная на валу дополнительного органа, взаимодействуете подвижным элементом второй полумуфты, расположённой на валу привода, причем подвижный элемент взаимодействует с повоVI
ю
Ьь
00
09
4
ротным рычагом, соединенным с пружинным механизмом, обеспечивающим фиксацию рычага в крайних верхнем и нижнем положениях.
Признаки, отличающие изобретение от прототипа в известных аналогах не обнаружены.
Положительный эффект достигается использованием в устройстве всех отличительных признаков, указанных в формуле.
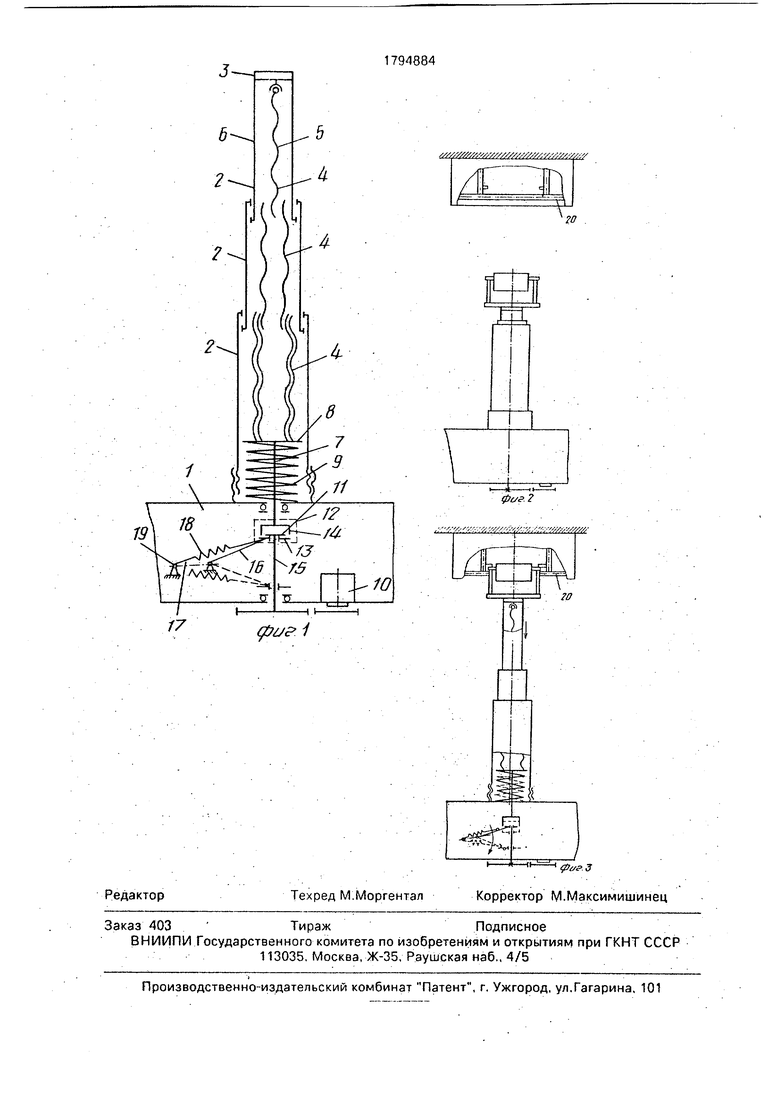
На фиг.1 и 2 показана оба(ая схема устройства; на фиг.З - устройство в работе.
Устройство состоит из корпуса 1, установленных на нем телескопических направляющих 2 с грузовой платформой 3, внутри которых размещен телескопический винт 4, верхняя секция 5 которого жестко связана с верхней секцией 6 направляющих 2, а вал 7 винта 4 оснащен планшайбой 8, подпружиненной упругим элементом 9 и соединен с приводом 10 управляемой фрикционной дисковой муфтой 11, выполненной с возможностью компенсации продольных перемещений винта 4, полумуфта 12 которой, расположённая на валу 7, взаимодействует с подвижным элементом 3 второй полумуфты 14, расположенной на валу 15 привода 10, причем подвижный элемент- втулка 13 удерживается в крайних верхнем и нижнем положениях с помощью поворотного рычага 16, соединенного с пружинным механизмом 17, а опорные шарниры 18 рычага 16 и 19 механизма 17 расположёны таким образом, что механизм 17 обеспечивает фиксацию рычага 16 как в верхнем,так и в нижнем положениях.
Устройство работает следующим образом..
В исходном положении направляющие 2 и винт 4 находятся в сложенном положении, а упругий элемент 9 отрегулирован в зависимости от конкретного поднимаемого груза. Подвижный элемент 13 полумуфты 14 занимает крайнее верхнее положение и
удерживается рычагом 16 и пружинным механизмом 17, в результате чего муфта 11 находится в рабочем положении, т.е. способна передавать вращающий момент от
привода 10 на вал 7. При работе привода 10 вращение с вала 15 передается на вал 7, жестко связанный с телескопическим винтом 4, который выдвигает направляющие 2 с грузовой платформой 3 и поднимает груз
до упора в место установки поз 20. Сила реакции, действуя через груз и верхнюю секцию 6 направляющих 2 на винт 4 с валом 7 и планшайбой 8, преодолевает сопротивление упругого элемента 9, вследствие чего
винт 4, секция 6 с грузовой платформой 3 и грузом опускается вниз относительно направляющих 2 и корпуса 1. При этом полумуфта 12 на валу 7 действует на подвижный элемент 13 полумуфты 14, расположенной
на валу 15 привода 10, который плавно скользя по валу 15 принуждает рычаг 16 вращаться вокруг опорного шарнира 18, преодолевая стягивающее усилие пружинного механизма 17. После пересечения рычагом 16 линии, на которой расположены опорные шарниры 18 и 19 рычага 16 и механизма 17, пружинный механизм 17, в связи с отсутствием сопротивления его стягивающему усилию, рывком переводит рычаг 16 в
крайнее нижнее положение, увлекая подвижный элемент 13 муфты 12 вниз, в результате чего муфта 12 отключается и передача вращающего момента от привода 10 на вал 7 прекращается, движение подьемника прекращается, что позволяет избежать деформации или разрушения груза или конструкции, на которую устанавливается груз.
Использование данного изобретения
позволит обеспечить высокую степень надежности и исключить аварийные ситуации при выполнении монтажно-сборочных работ, - ..
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| ПОДЪЕМНОЕ ВИНТОВОЕ УСТРОЙСТВО | 2022 |
|
RU2797849C1 |
| Транспортно-накопительная система | 1985 |
|
SU1312029A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| ПОДЪЕМНИК ДЛЯ ОСМОТРА СТРОИТЕЛЬНОЙ ЧАСТИ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1994 |
|
RU2141444C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2393986C2 |
| ГРУЗОВОЙ ПОДЪЕМНИК | 2001 |
|
RU2210525C1 |
Изобретение относится к подъемно- транспортному машиностроению и может быть использовано в любой отрасли народного хозяйства при автоматизации монтаж- но-сборочных работ. Сущность изобретения:телескопический винт устройства для подъема груза связан с валом с возможностью их совместного осевого перемещения. Вал выполнен с управляемой муфтой и выключающей втулкой, связанной с рычажно-пружинным механизмом. При упоре винта в препятствие вал перемещается вдоль оси, перемещает выключающую втулку, которая посредством рычажно-пру- жинного механизма принудительно перемещается вдоль вала и выключает муфту, предохраняя устройство от поломки. 3 ил.
Формулаизобретения
Устройство для подъема груза, содержащее установленный на опоре телескопический винт, верхним концом связанный с грузовой платформой, а нижним - с размещенным соосно с ним валом, своим нижним концом соединенным с приводом, отличаю- щ е е с я тем, что, с целью повышения надежности, вал выполнен из двух соосных частей, верхняя из которых связана с телескопическим винтом посредством подпружиненной относительно опоры планшайбы и установлена с возможностью осевого перемещения совместно с винтом, а устройство снабжено фрикционной дисковой муфтой для соединения частей вала, выполненной с подвижными в осевом направлении дисками, выключающей втулкой, установленной на ведущей полумуфте с возможностью возвратно-поступательного перемещения вдоль нее и взаимодействия с ведомой полумуфтой, и рычажно-пружинным механизмом, шарнирно связанный с втулкой для ее принудительного перемещения и фиксации в крайних положениях.
Заказ 403 Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035. Москва, Ж-35, Раушская наб., 4/5
| Винтовой подъемник | 1979 |
|
SU816945A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Подъемник телескопический | 1977 |
|
SU658078A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Телескопический подъемник | 1972 |
|
SU443837A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
