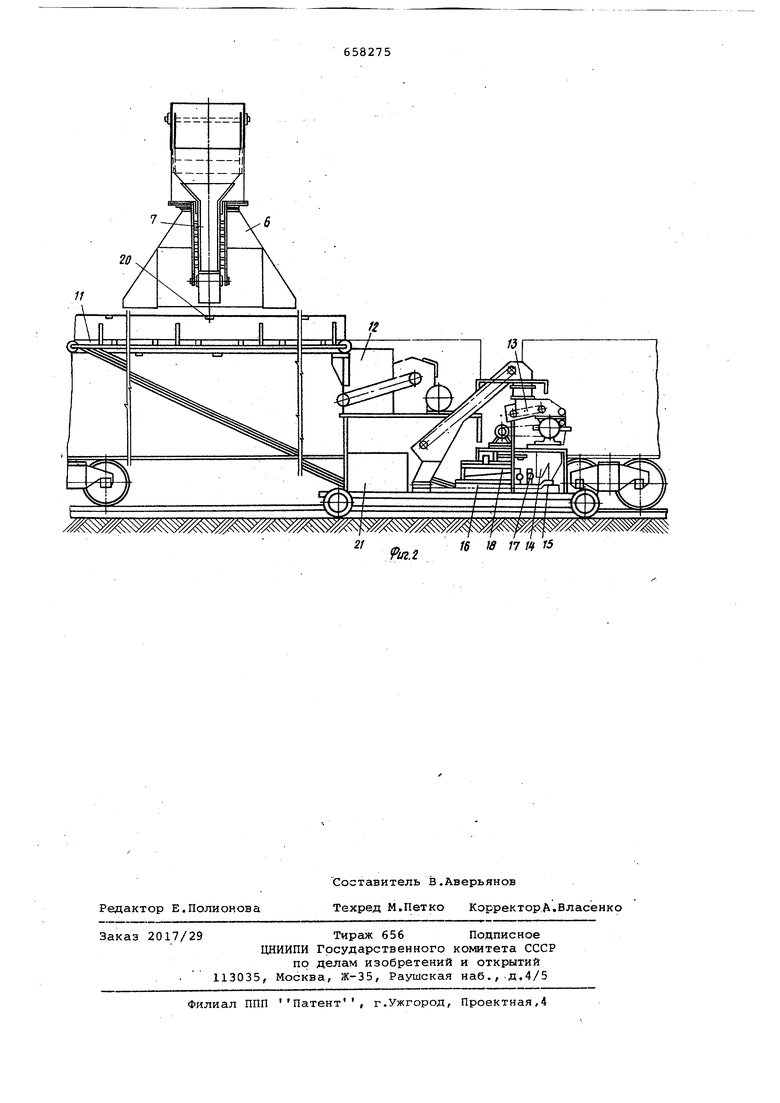
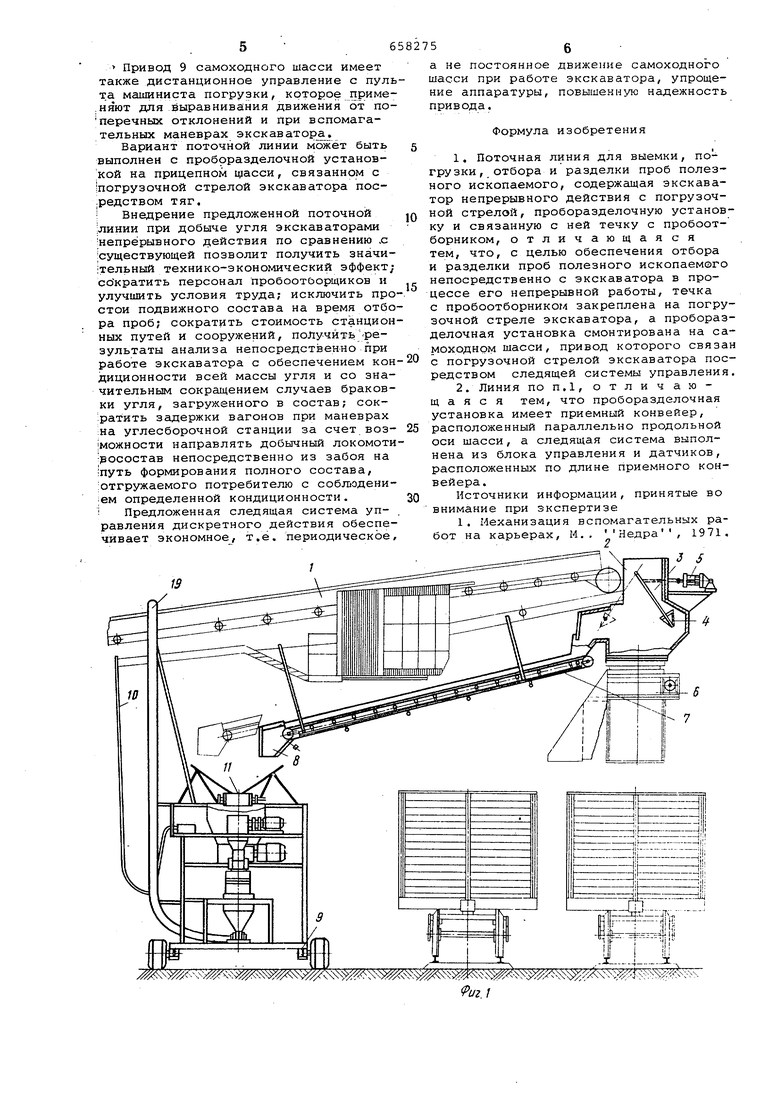
На фиг.1 показана поточная линия, поперечный разрез; на фиг.2 - то же, продольный разрез.
На конце погрузочной стрелы 1 экскаватора закреплена течка 2, внутри которой на двух тягах 3 крепитдя ковш 4 пробоотборника. Тяги соединены со штоком гидро- или пневмоцилиндра 5. Под течкой 2 крепится поворотная двухрукавная головка 6 с приводом. С течкой 2 сопряжен подвешенный к стреле 1 конвейер 7 со сбрасывающей головкой 8.Параллельно загружаемому составу расположена проборазделочная установка, смонтированная на самоходном шасси привод 9 которого питается об кабеля 10 и связан с погрузочной стрелой 1 посредством следящей системы управления.
Проборазделочная установка имеет приемный конвейер 11, расположенный параллельно оси самоходного шасси и параллельно оси железнодорожного пути , Установка содержит приемный бункер 12, механизмы 13 технологической схемы проборазделки (питатели, дробилки, сократители пробы на чертеже позициями не показаны), бункер 14 готовой пробы, банку 15 контрольной пробы, конвейер 16, формирующее устройство 17, аппаратуру экспресс-анализа 18. С проборазделочной установкой связан транспортер 19 возврата отходов.
Следящая система управления приводом 9 выполнена из датчиков 20 и блока управления 21, задающего программу автоматической работы.Минимум три датчика 20 расположены на раме конвейе- . ра 11 по его длине с возможностью взаимодействия датчиков с определенными элементами сбрасывающей головки 8, связанной со стрелой 1 экскаватора.
Датчики 20 могут быть фотоэлектрическими, индуктивными, электродными, в виде конечных выключателей или других типов; в первом случае на конвейере 11 установлены светоприемники, а на сбрасывающей головке 8 - осветитель; в последних двух случаях на конвейере установлены электроды или конечные выключатели, а на сбрасывающей головке 8 - отбойная линейка (или в качестве таковой используется конструктивный выступ узла головки 8). Датчики 20 расположены по концам и по середине конвейера 11, при этом крайние датчики предназначены для автоматического включения привода 9 самоходного шасси, а средний датчик - для автоматического отключения этого привода.,
Устройство работает следующим-образом. В процессе выемки полезного ископаемого экскаватором и погрузки в вагоны с помощью стрелы 1 периодически по программе ковш 4 высекает из падаиощего потока полезного ископаемого объем, соответствующий одной порции пробы. При реверсировании ковша отобранная порция высыпается из него и поступает на конвейер 7, который передает
1порцию со сбрасывающей головки 8 на приемный конвейер 11 проборазделочной установки.
Стрела 1 экскаватора в процессе погрузки состава совершает повороты на небольшой угол, а также перемещается при подаче всего экскаватора фронта забоя. В любом из этих случаев сбрасывающая головка 8 перемещается вдоль оси железнодорожного пути, а значит, смещается относительно самохоного шасси с проборазделочной установкой. Пока в процессе такого относительного смещения сбрасывающая головка 8 продолжает оставаться в зоне приемного конвейера 11, т.е. в зоне между крайними датчиками 20, самоходное шасси стоит на месте. При подходе сбрасывающей головки 8, например, к правому концу конвейера 11 (см.фиг.2) срабатывает правый датчик 20, если он выполнен в виде светоприемника фотореле, то срабатывает от воздействия луча осветителя, закрепленного на головке 8, а если - в виде электрода или конечного выключателя, то срабатывает от наезжания отбойной линейки. В результате срабатывания правого датчика 20 включается привод 9 самоходного шасси на перемещение шассивправо , так что конвейер 11 на самоходном шасси обгоняет сбрасывающую головку 8. Это обгонное движение продолжается, пока от луча осветителя ил отбойной линейки не сработает средний датчик 20 (светоприемник или конечный выключатель соответственно); при ерабатывании среднего датчика 20 привод самоходного шасси отключается, оно останавливается. Если в процессе погрузки состава головка 8 сместится к левому концу конвейера 11, срабатывает левый датчик 20 и привод 9 включается на перемещение самоходного шасси влево; такое перемещение продолжается до того момента, когда сработает средний датчик 20, который снова отключает привод . Таким образом, сбрасывающая головка 8 всегда оказывается в зоне приемного конвейера 11, а самоходное шасси следит за относительным смещением головки 8, причем эта следящая связь носит не непрерывный, а дискретный характер.
После накопления определенного числа порций в бункере 12 включаются все механизмы L3, часть готовой пробы поступает в бункер 14, а другая часть контрольная проба - в банку 15. Из бункера 14 готовая проба поступает на конвейер 16, на котором устройстве 17 формирует постель материала для экспресс-анализа, осуществляемого аппаратурой 18. В конце конвейера 16 проба соединяется с отходами от первого дробления и транспортером 19 возвращается на погрузочную стрелу 1. Показания от аппаратуры 18 дистанционно передаются на пульт диспетчера разреза или машиниста погрузки. Привод 9 самоходного шасси имеет также дистанционное управление с пуль та машиниста погрузки, которое приме.няют для выравнивания движения от поперечных отклонений и при вспомагательных маневрах экскаватор.. Вариант поточной линии может быть выполнен с пробрразделочной установкой на прицепном шасси, связанном с погрузочной стрелой экскаватора пос,редством тяг, Внедрение предложенной поточной линии при добыче угля экскаваторами непрерывного действия по сравнению ,с существующей позволит получить значи;тельный технико-экономический эффект; сократить персонал пробоотЬорщиков и улучшить условия труда; исключить про стои подвижного состава на время отбо ра проб; сократить стоимость станцион ных путей и сооружений, получить -Ре зультаты анализа непосредственно при работе экскаватора с обеспечением кон диционности всей массы угля и со значительным сокращением случаев браковки угля, загруженного в состав; сократить задержки вагонов при маневрах на углесборочной станции за счет воз1МОЖНОСТИ направлять добычный локомоти росостав непосредственно из забоя на ;путь формирования полного состава, :отгружаемого потребителю с соблюдени|ем определенной кондиционности. Предложенная следящая система управления дискретного действия обеспечивает экономное, т.е. периодическое. VxiiU- ,, ххччхч хччу JJxX ч хххх а не постоянное движение самоходного шасси при работе экскаватора, упрощение аппаратуры, повышенную надежность привода. Формула изобретения 1,Поточная линия для выемки, погрузки, отбора и разделки проб полезного ископаемого, содержащая экскаватор непрерывного действия с погрузочной стрелой, проборазделочную установку и связанную с ней течку с пробоотборником, отличающаяся тем, что, с целью обеспечения отбора и разделки проб полезного ископаемого непосредственно с экскаватора в процессе его непрерывной работы, течка с пробоотборником закреплена на погрузочной стреле экскаватора, а проборазделочная установка смонтирована на самоходном шасси , привод которого связан с погрузочной стрелой экскаватора посредством следящей системы управления, 2.Линия по п.1, отличающая с я тем, что проборазделочная установка имеет приемный конвейер. расположенный параллельно продольной оси шасси, а следящая система выполнена из блока управления и датчиков, расположенных по длине приемного конвейера. Источники информации, принятые во внимание при экспертизе 1. Механизация вспомагательных работ на карьерах, М.. „Недра, 1971, L,.-4 . f 2 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ УГОЛЬНЫХ МЕСТОРОЖДЕНИЙ | 1994 |
|
RU2078928C1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 1993 |
|
RU2039160C1 |
| СПОСОБ ЦИКЛИЧНО-ПОТОЧНОЙ ОТРАБОТКИ СКАЛЬНЫХ ГОРНЫХ ПОРОД | 2008 |
|
RU2362877C1 |
| УНИВЕРСАЛЬНЫЙ ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2172836C2 |
| Способ разработки месторождений твердых полезных ископаемых | 2019 |
|
RU2707318C1 |
| ПОГРУЗОЧНОЕ УСТРОЙСТВО | 1996 |
|
RU2084628C1 |
| Погрузочная машина | 1957 |
|
SU113067A1 |
| Устройство для автоматического регулирования производительности роторного экскаватора | 1979 |
|
SU787560A1 |
| УСТРОЙСТВО для ПОДАЧИ РАСКИСЛИТЕЛЕЙ В СТАЛЕРАЗЛИВОЧНЫЙ КОВШ | 1973 |
|
SU391908A1 |
| Горная машина | 1974 |
|
SU614222A1 |