I
Изобретение относится к области приборостроения и может быть использовано в часовой промышленности.
Известны механические преобразователи движения для приборов времени, в частности - для преобразования колебательного движения балансового осциллятора в дискретное вращательное движение колес редуктора часов 1.
В известном устройстве преобразование движения происходит с помощью механической передачи, состоящей из двух шайб с наклонными налетами, взаимодействующими со штифтами ходового колеса, на торцовой поверхности которого выполнены пазы, западая в которые специально установленная пружина осуществляет фиксацию ходового колеса. Наличие механических зацеплений и деталей со сложной конфигурацией снижает надежность устройства, исключает возможность регулирования передаточного отнощения и усложняет конструкцию.
Известны также электромагнитные устройства, имеющие на выходе дискретное вращательное движение вала с фиксацией положения ротора в неподвижном его состояНИИ без механических зацеплений подвижных и неподвижных деталей. Известное устройство состоит из магнитопровода с постоянными магнитами, неподвижно установленными в нем, и с зубцами, взаимодействующими через воздушный зазор с зубцами ротора, закрепленного на выходном валу 2.
Однако такое устройство С1гособно преобразовывать только электрическую энергию в упомянутую форму механической энергии и не способно преобразовывать колебательное движение в дискретное вращательное.
Цель изобретения - расщирение функциональных возможностей устройства.
С этой целью в магнитопроводе симметрично относительно одноименных полюсов
5 выполнен воздушный зазор, в котором установлен подвижный постоянный магнит, соединенный с входным валом.
Кроме этого с целью передаточного отношения, подвижный магнит выполнен многополюсным. При этом многополюсный маг0нит может быть выполнен в виде двух подвижно установленных ма входном валу стержневых постоянных магнитов, смещенных вдоль оси вращения.
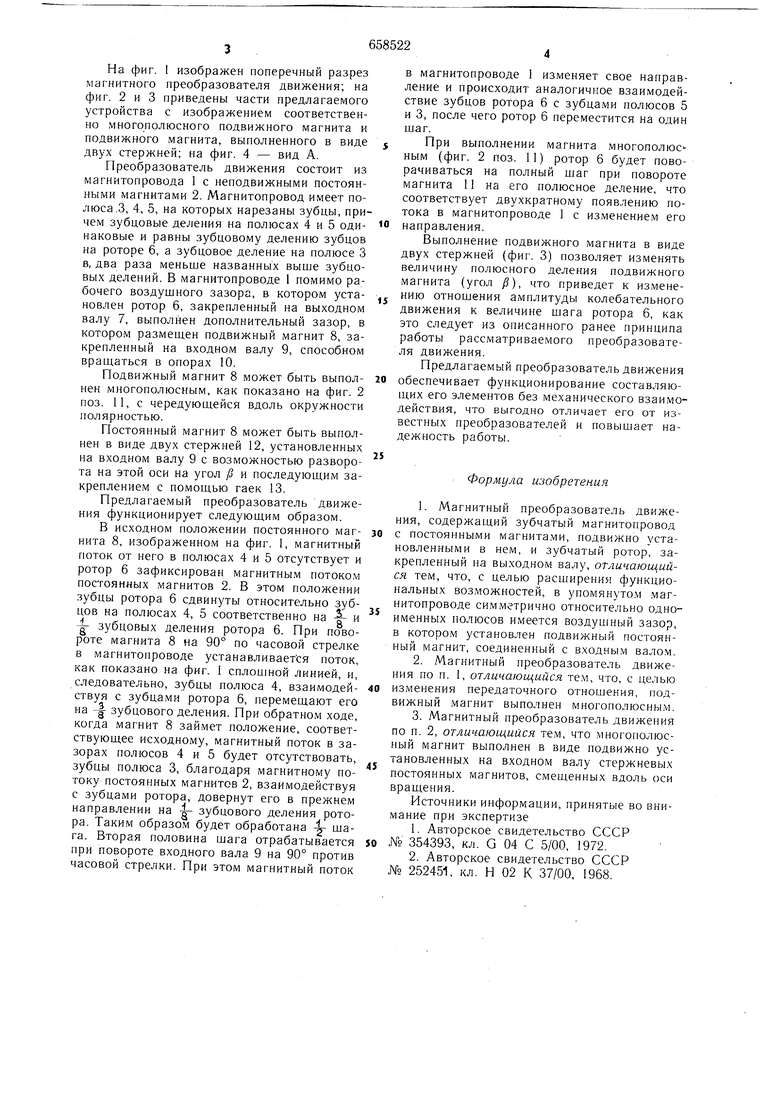
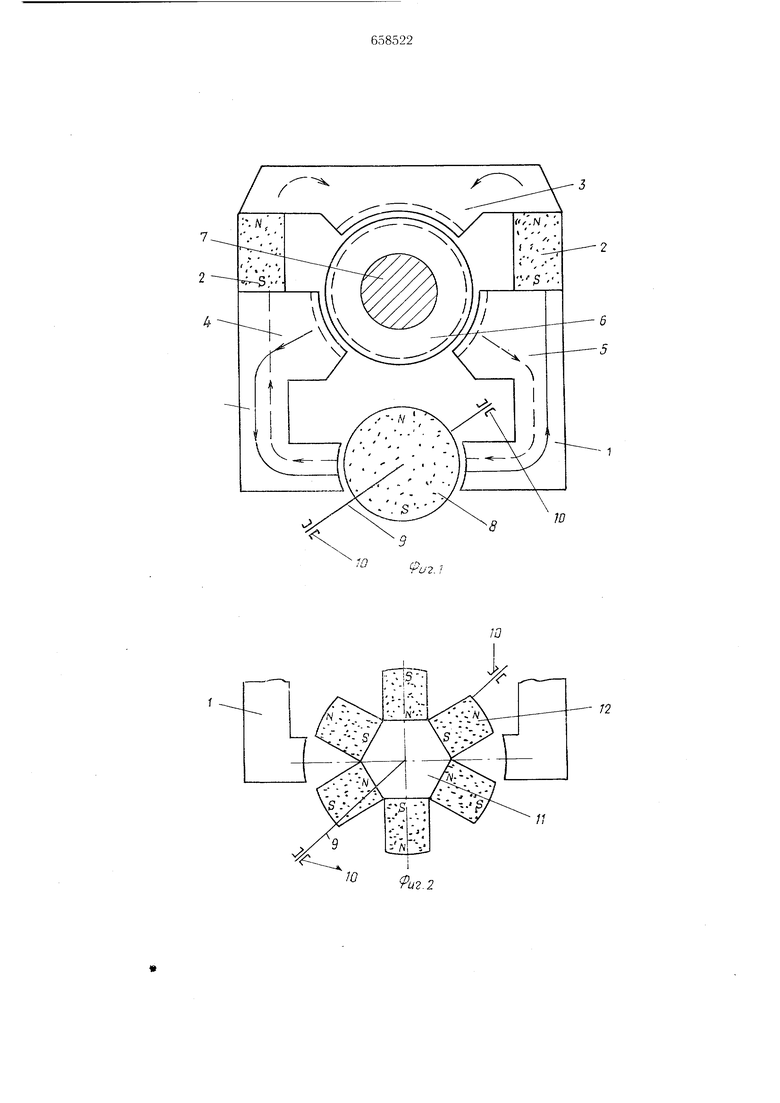
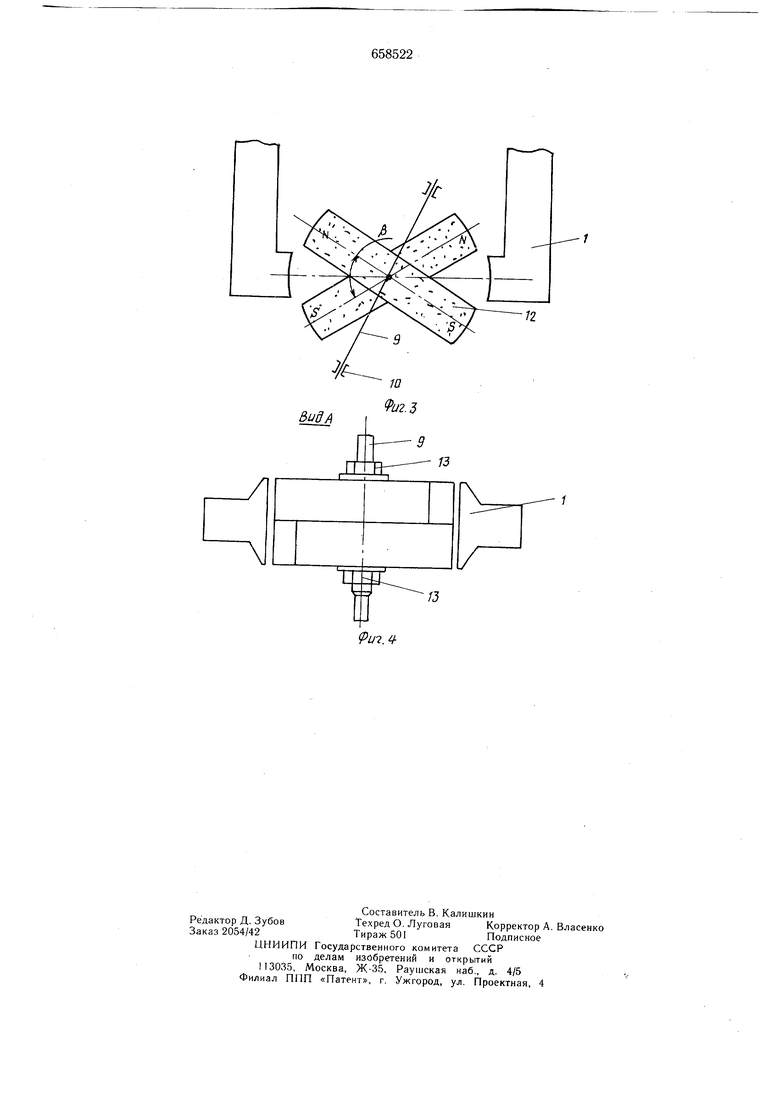
На фиг. 1 изображен поперечный разрез магнитного нреобразователя движения; на фиг. 2 и 3 приведены части предлагаемого устройства с изображением соответственно многополюсного подвижного магнита и подвижного магнита, выполненного в виде двух стержней; на фиг. 4 - вид А.
Преобразователь движения состоит из магнитопровода 1 с неподвижными постоянными магнитами 2. Магнитопровод имеет полюса .3, 4, 5, на которых нарезаны зубцы, причем зубцовые деления на полюсах 4 и 5 одинаковые и равны зубцовому делению зубцов на роторе 6, а зубцовое деление на полюсе 3 в, два раза меньше названных выше зубцовых делений. В магнитопроводе 1 помимо рабочего воздушного зазора, в котором установлен ротор б, закрепленный на выходном валу 7, выполнен дополнительный зазор, в котором размешен подвижный магнит 8, закрепленный на входном валу 9, способном враш,аться в опорах 10.
Подвижный магнит 8 может быть выполнен многополюсным, как показано на фиг. 2 поз. 11, с чередующейся вдоль окружности полярностью.
Постоянный магнит 8 может быть выполнен в виде двух стержней 12, установленных на входном валу 9 с возможностью разворота на этой оси на угол j и последующим закреплением с помощью гаек 13.
Предлагаемый преобразователь движения функционирует следующим образом.
В исходном положении постоянного магнита 8, изображенном на фиг. 1, магнитный поток от него в полюсах 4 и 5 отсутствует и ротор 6 зафиксирован магнитным потоком постоянных магнитов 2. В этом положении зубцы ротора 6 сдвинуты относительно зубцов на полюсах 4, 5 соответственно на -|- и -g- зубцовых деления ротора 6. При повороте магнита 8 на 90° по часовой стрелке в магнитопроводе устанавливается поток, как показано на фиг. I сплоц ной линией, и, следовательно, зубцы полюса 4, взаимодействуя с зубцами ротора 6, перемещают его на -|- зубцового деления. При обратном ходе, когда магнит 8 займет положение, соответствующее исходному, магнитный поток в зазорах полюсов 4 и 5 будет отсутствовать, зубцы полюса 3, благодаря магнитному потоку постоянных магнитов 2, взаимодействуя с зубцами ротора, довернут его в прежнем направлении на 4- зубцового деления ротора. Таким образом будет обработана шага. Вторая половина шага отрабатывается при повороте входного вала 9 на 90° против часовой стрелки. При этом магнитный поток
в магнитопроводе 1 изменяет свое направление и происходит аналогичное взаимодействие зубцов ротора 6 с зубца.ми полюсов 5 и 3, после чего ротор 6 пере.местится на один шаг.
При выполнении .магнита .многополюсным (фиг. 2 поз. II) ротор 6 будет поворачиваться на полный шаг при повороте магнита 11 на его полюсное деление, что соответствует двухкратному появлению потока в магнитопроводе 1 с изменение.м его направления.
Выполнение подвижного магнита в виде двух стержней (фиг. 3) позволяет изменять величину полюсного деления подвижного магнита (угол ), что приведет к изменению отношения амплитуды колебательного движения к величине шага ротора 6, как это следует из описанного ранее принципа работы рассматриваемого преобразователя движения.
Предлагаемый преобразователь движения обеспечивает функционирование составляющих его элементов без механического взаимодействия, что выгодно отличает его от известных преобразователей и повышает надежность работы.
Формула изобретения
. Магнитный преобразователь движения, содержащий зубчатый магнитопровод с постоянными магнита.ми, подвижно установленными в нем, и зубчатый ротор, закрепленный на выходном валу, отличающийся тем, что, с целью расширения функциональных возможностей, в упомянуто.м .магнитопроводе симметрично относительно одноименных полюсов имеется воздушный зазор, в котором установлен подвижный постоянный магнит, соединенный с входны.м вало.м.
2.Магнитный преобразователь движения по п. 1, отличающийся тем, что, с целью изменения передаточного отношения, подвижный магнит выполнен многополюсным.
3.Магнитный преобразователь движения по п. 2, отличающийся тем, что .многополюсный магнит выполнен в виде подвижно установленных на входном валу стержневых постоянных магнитов, смещенных вдоль оси вращения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 354393, кл. G 04 С 5/00, 1972.
2.Авторское свидетельство СССР № 252451 кл. Н 02 К 37/00, 1968.
W
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579756C2 |
| Электромеханический преобразователь бесконтактного тахогенератора постоянного тока | 1989 |
|
SU1767634A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2018 |
|
RU2700179C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2629003C2 |
| ТОРЦЕВАЯ ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ОДНОФАЗНОГО ТОКА | 1990 |
|
RU2024163C1 |
| Шаговый электродвигатель | 1985 |
|
SU1427514A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2001 |
|
RU2181091C1 |
| Магнитоэлектрический двигатель | 1979 |
|
SU1111231A1 |
| ДИСКОВОЕ УНИВЕРСАЛЬНОЕ МОТОР-КОЛЕСО СМИРНОВА | 1995 |
|
RU2129964C1 |
72
/
U2.2
