(54) ДАТЧИК ПЕРЕМЕЩЕНИЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктосин | 1983 |
|
SU1136266A1 |
| Датчик перемещения - "индуктокор | 1978 |
|
SU817894A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Синусно-косинусный датчик угла | 1978 |
|
SU765945A1 |
| Бесконтактный индуктосин | 1977 |
|
SU658672A1 |
| Индукционный фазовый преобразователь | 1975 |
|
SU752426A1 |
| Устройство для двухканальной дистанционнойпЕРЕдАчи углА | 1979 |
|
SU851672A1 |
| Вентильный электродвигатель | 1980 |
|
SU972634A1 |
| Многоотсчетный датчик положенияи СпОСОб изМЕРЕНия пОлОжЕНия СпОМОщью дАТчиКА | 1976 |
|
SU817738A1 |

I
Изобретение относится к электротехнике и измерительной технике и может быть использовано в устройствах измерения перемещений подвижных узлов станков, машин и приборов.
В современном машиностроении и приборостроении для определения точного углового положения поворотных узлов машин, станков и приборов широко используются индуктивные датчики с печатными обмотками, получившие название индуктосин: Датчик этого типа содержит статор- и роторэлементы, на которых расположены плоские печатные обмотки, выполненные в виде периодического зигзага. На одном из элементов, как правило на статоре, расположены две обмотки, которые сдвинуты между собой на 1/4 часть периода, а на другом элементе размещены одна обмотка или две, также сдвинутые между собой на 1/4 часть периода 1.
Одним из недостатков датчиков этого типа является погрешность, которая возникает при перекосах во взаимном расположении обмоток ротора и статора. Эти перекосы, выражающиеся в радиальном биении обмоток относительно оси вращения ротора
и торцовых перекосах обмоток относительно плоскости, перпендикулярной оси вращения, возникают при изготовлении датчика и его установке в корпусе или оборудовании.
Максимальные величины переменной и , постоянной составляющей погрещности при торцовых и осевых биениях обмоток определяются
Ы U)
A«f«a ±г(о ZzStjJj
0 гдеР -число пар полюсов;
R«p - средний радиус обмотки; а-эксцентриситет геометрического
центра обмоток соответственно статора и ротора относительно оси вращения ротора;
6, Sz-максимальные переносы обмоток соответственно статора и ротора относительно плоскостей, проведенных перпендикулярно оси вращения, измеренные на расстоянии ,Rt| от оси вращения.
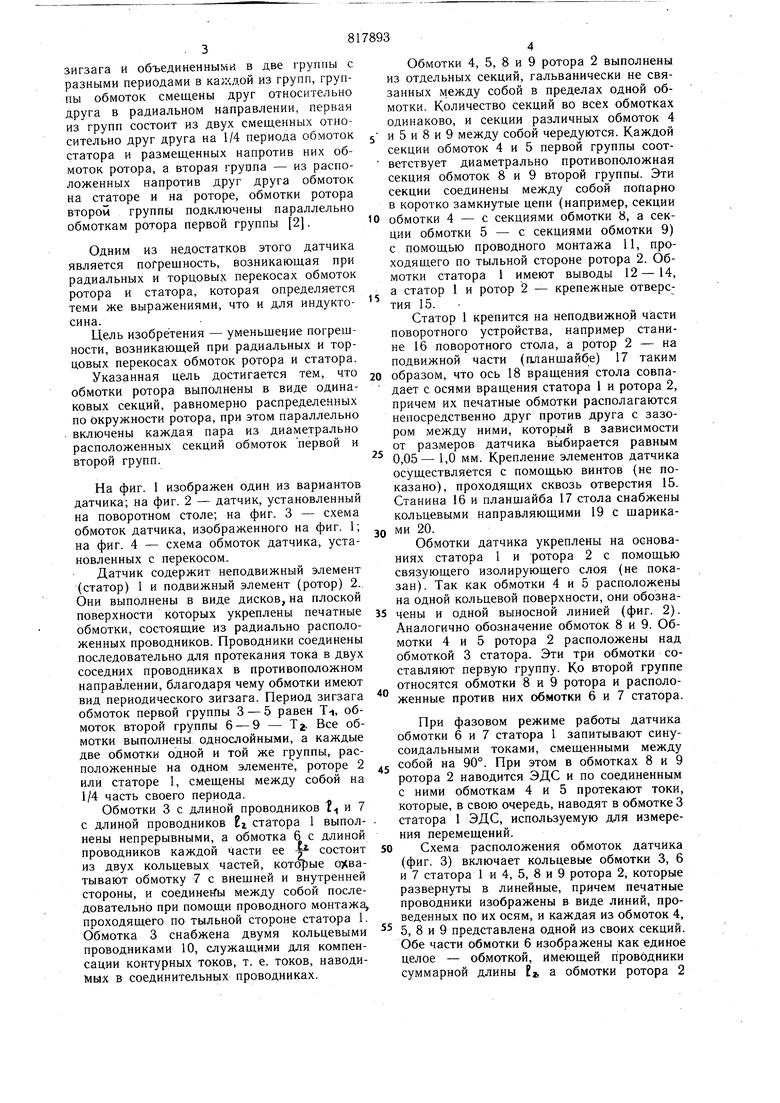
Наиболее близким к предлагаемому является Датчик перемещений, содержащий дисковые статор и ротор с печатными обмотками, выполненными в виде периодического зигзага и объединенными в две группы с разными периодами в .дой из групп, группы обмоток смещены друг относительно друга в радиальном направлении, первая из групп состоит из двух смещенных относительно друг друга на 1/4 периода обмоток статора и размещенных напротив них обмоток ротора, а вторая группа - из расположенных напротив друг друга обмоток на статоре и на роторе, обмотки ротора втором группы подключены параллельно обмоткам ротора первой группы 2. Одним из недостатков этого датчика является погрешность, возникающая при радиальных и торцовых перекосах обмоток ротора и статора, которая определяется теми же выражениями, что и для индуктосина. Цель изобретения - уменьшение погрешности, возникающей при радиальных и торцовых перекосах обмоток ротора и статора. Указанная цель достигается тем, что обмотки ротора выполнены в виде одинаковых секций, равномерно распределенных по окружности ротора, при этом параллельно включены каждая пара из диаметрально расположенных секций обмоток первой и второй групп. На фиг. 1 изображен один из вариантов датчика; на фиг. 2 - датчик, установленный на поворотном столе; на фиг. 3 - схема обмоток датчика, изображенного на фиг. 1; на фиг. 4 - схема обмоток датчика, установленных с перекосом. Датчик содержит неподвижный элемент (статор) 1 и подвижный элемент (ротор) 2. Они выполнены в виде дисков, на плоской поверхности которых укреплены печатные обмотки, состоящие из радиально расположенных проводников. Проводники соединены последовательно для протекания тока в двух соседних проводниках в противоположном направлении, благодаря чему обмотки имеют вид периодического зигзага. Период зигзага обмоток первой группы 3 - 5 равен T-t, обмоток второй группы 6 - 9 - Tj. Все обмотки выполнены однослойными, а каждые две обмотки одной и той же группы, расположенные на одном элементе, роторе 2 или статоре 1, смещены между собой на 1/4 часть своего периода. Обмотки 3 с длиной проводников ., и 7 с длиной проводников Ег статора 1 выполнены непрерывными, а обмотка 6 с длиной проводников каждой части ее 4 состоит из двух кольцевых частей, охватывают обмотку 7 с внешней и внутренней стороны, и соединены между собой последовательно при помощи проводного монтажа проходящего по тыльной стороне статора 1. Обмотка 3 снабжена двумя кольцевыми проводниками 10, служащими для компенсации контурных токов, т. е. токов, наводимых в соединительных проводниках. Обмотки 4, 5, 8 и 9 ротора 2 выполнены из отдельных секций, гальванически не связанных между собой в пределах одной обмотки. Количество секций во всех обмотках одинаково, и секции различных обмоток 4 и 5 и 8 и 9 между собой чередуются. Каждой секции обмоток 4 и 5 первой группы соответствует диаметрально противоположная секция обмоток 8 и 9 второй группы. Эти секции соединены между собой попарно в коротко замкнутые цепи (например, секции обмотки 4 - с секциями обмотки 8, а секции обмотки 5 - с секциями обмотки 9) с помощью проводного монтажа 11, проходящего по тыльной стороне ротора 2. Обмотки статора 1 имеют выводы 12 - 14, а статор 1 и ротор 2 - крепежные отверстия 15. Статор I крепится на неподвижной части поворотного устройства, например станине 16 поворотного стола, а ротор 2 - на подвижной части (планщайбе) 17 таким образом, что ось 18 вращения стола совпадает с осями вращения статора 1 и ротора 2, причем их печатные обмотки располагаются непосредственно друг против друга с зазором между ними, который в зависимости от размеров датчика выбирается равным 0,05- 1,0 мм. Крепление элементов датчика осуществляется с помощью винтов (не показано), проходящих сквозь отверстия 15. Станина 16 и планшайба 17 стола снабжены кольцевыми направляющими 19 с шариками 20. Обмотки датчика укреплены на основаниях статора 1 и ротора 2 с помощью связующего изолирующего слоя (не показан) . Так как обмотки 4 и 5 расположены на одной кольцевой поверхности, они обозначены и одной выносной линией (фиг. 2). Аналогично обозначение обмоток 8 и 9. Обмотки 4 и 5 ротора 2 расположены над обмоткой 3 статора. Эти три обмотки составляют первую группу. Ко второй группе относятся обмотки 8 и 9 ротора и расположенные против них обмотки 6 и 7 статора. При фазовом режиме работы датчика обмотки 6 и 7 статора 1 запитывают синусоидальными токами, смещенными между собой на 90°. При этом в обмотках 8 и 9 ротора 2 наводится ЭДС и по соединенным с ними обмоткам 4 и 5 протекают токи, которые, в свою очередь, наводят в обмотке 3 статора 1 ЭДС, используемую для измерения перемещений. Схема расположения обмоток датчика (фиг. 3) включает кольцевые обмотки 3, 6 и 7 статора 1 и 4, 5, 8 и 9 ротора 2, которые развернуты в линейные, причем печатные проводники изображены в виде линий, проведенных по их осям, и каждая из обмоток 4, 5, 8 и 9 представлена одной из своих секций. Обе части обмотки 6 изображены как единое целое - обмоткой, имеющей проводники суммарной длины Ej, а обмотки ротора 2 имеют направление перемещения tf .Стрелками обозначено направление тока в обмотках, принятое за положительное. Ма, М, , , М Msji - коэффициенты взаимоиндукции соответственно обмотки 6 и секции обмотки 8, обмотки 7 и секции обмотки 8 и т. д. В отсутствие перекосов при перемещении ротора они меняются по синусоидальным законам амплитудой Мв. Мб.9 MY.8 М sinRitp I Мт.9,-Мб,(2) Mi, M osPi«| М 5;з M-sin PI Ц) -Р-1 и Рг - число пар полю«м 1 - «t 4 it- « invt/n пар jiUi injсов обмоток сЪответствД{но первой и второй групп. Предположим, что датчик работает в фазовом режиме. При этом обмотки 6 и 7 статора запитывают синусоидальными токами амплитудной фазовым сдвигом в 90°. Под действием этих токов в каждой из секций обмоток 8 и 9 наводятся соответственно ЭДС Ев - (Ме4-+M g (Мб.+М,,,й) По каждой из секций обмоток 4 и 5 протекают соответственно токи . . гдер- суммарное сопротивление секции обмотки 8 или 9, секции обмотки 4 или5 и соединяющих их проводов. Эти токи,в свою очередь, наводят ЭДС в обмотке3 статора 1 V-N(M.3.M5.) NM(.(.)t-(, где N - количество секций обмоток 4, 5, 8, 9, f- суммарное сопротивление секций обмотки 8 или 9. Таким образом, на выходе датчика получают синусоидальный сигнал со строго линейной зависимостью его фазы от угла поворота ротора. Измеряя величину. этой фазы относительно опорного сигнала (sinoet). получают точные данные об угле поворота ротора. Посмотрим теперь, что происходит, когда обмотки ротора и статора установлены с перекосом. На фиг. 4 представлена схема расположения обмоток с эксцентриситетом. Сплошными линиями обозначены проводники обмоток ротора 2, пунктирными линиями - проводники обмоток статора. На фиг. 4 - угол между двумя имеющими один и тот же порядковый номер проводниками соседних секций обмоток одной и той же группы. О - центр вращения ротора, Oi и О г - герметические центры обмоток соответственно статора и ротора. R -средний радиус обмотки 3 статора RI-средний радиус обмоток 6 н 7 статора 1. При наличии эксцентриситетов и.меют место изменения во взаимном положении проводников ротора и статора. Проводники сдвигаются друг относительно друга в радиальном направлении, имеет место взаимный угловой сдвиг, переменный по окружности. Кроме того, так как обмотки установлены с перекосом относительно плоскости, перпендикулярной оси .вращения ротора, то зазор между обмотками ротора и статора оказывается переменным по окружности и каждая точка проводника ротора, спроектированная на плоскость, перпендикулярную оси вращения, движется не по окружности, а по эллипсу. Не все из указаннь1х факторов оказывают заметное влияние на величину погрещности, поэтому при расчетах погрешностей учитывают только переменный угловой сдвиг между проводниками и переменный зазор между обмотками. При этих условиях соотношения (2) нарущаются, так как для различных проводников величины М„ и «установятся различными. Расчет коэффициента взаимоиндукции любого проводника ротора 2 и соответствующей обмотки статора 1 производят по положению точки этого проводника, расположенной на окружности, имеющей радиус, равный среднему радиусу активной части прободников обмбтки, и проведенной из геометрического центра обмоток статора 1 или ротора 2 или из центра вращения ротора 2. В нашем случае проводники обмоток ротора 2 несколько длиннее. Расчеты показывают, что оценка максимальных величин переменной и постоянной составляющих погрещности предлагаемого датчика для всех практических случаев может производиться по формулам Д ( ДФ™ (2i6.-f 2г«.) Сравнение полученных результатов показывает, что погрешность предлагаемого датчика как постоянная, так и переменная, вызываемая эксцентриситетом и перекосами, в 1,3 № раз меньше, чем погрешность прототипа. Увеличивая число N секций, на которые разделяются обмотки ротора, эту погр шность можно снизить до любой заданной величины. Погрешность уменьшается, когда количество пар полюсов обмоток первой и второй
групп, средние радиусы обмоток этих групп выбираются из условий
. или 1 1Выполнение каждбй из обмоток ротора в виде не связанных между собой одинаковых секций, равномерно распределенных по окружности ротора, и параллельное подключение диаметрально противоположных секций обмоток каждой из групп позволяют повысить точность датчика при радиальных торцовых переносах обмоток статора и ротора.
Формула изобретения
Датчик перемещений, содержащий дисковые статор и ротор с печатными обмотками выполненными в виде периодического зигзага и объединенными в две группы с ра,зными периодами в каждой из групп, группы обмоток смещены друг относительно друга в радиальном направлении, первая из групп
ГЗ
состоит из двух смещенных относительно друг друга на 1/4 периода обмоток статора и размещенных напротив них обмоток ротора, а вторая группа - из расположенных напротив друг друга обмоток на статоре и
роторе, обмотки ротора второй группы подключены параллельно обмоткам ротора первой группы, отличающийся тем, что, с целью уменьшения погрешности, возникающей при радиальных и торцовых переносах обмоток ротора и статора, обмотки ротора выполнены
в виде одинаковых секций, равномерно распределенных по окружности ротора, при этом параллельно включены каждая .пара из диаметрально расположенных секций обмоток первой и второй группы.
Источники информации,
принятые во внимание при экспертизе
G 08 С 9/04, 1977.
JS
