рователя гармонических функций, вторые входы сумматоров подключены к выходам третьего и четвертого преобразователей налог-код,, входы которых образуют вторую пару входов формирователя гармонических функций, причем блок задания составляющих тока статора, блок регуляторов составляющих тока статора, блоки прямого и обратного преобразований координат, измеритель частоты вращения и формирователь гармонических функций выполнены в виде цифровых блоков.
3. Электропривод по пп. 1 и 2, отличающийся тем, что в блок вычислений фазных потокосцеплений дополнительно введены два апериодических звена, каждое из которых включено в цепь отрицательной обратной связи соответствующего интегратора фазной ЭДС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
1. ЭЛЕКТРОПРИВОД, содержащий синхронный двигатель, преобразователь частоты, выходы которого подключены к статорным обмоткам синхронного двигателя, а управляющие входы связаны с выходами блока фазных регуляторов, регулируемый возбудитель, выход которого соединен с обмоткой возбуждения синхронного двигателя, а управляющий вход - с выходом блока управления возбуждением, измеритель частоты вращения, датчики фазных токов и напряжений, установленные в статорных цепях синхронного двигателя и подключенные к входам блока вычислений фазных потокосцеплений с последовательно соединенными в каждой фазе формирователем и интегратором фазной ЭДС, формирователь гармонических функций с векторным анализатором на выходе и с двумя парами входов, первый преобразователь .числа фаз, блок обратного преобразования координат, последовательно соединенные блок задания составляющих тока статора, блок регуляторов составляющих тока статора, блок прямого преобразования, координат и второй преобразователь числа фаз, выходы которого подключены к входам блока фазных регуляторов, при этом входы опорных сигналов блоков прямого и обратного преобразований координат пофазно объединены между собой и соединены с выходами формирователя гармонических функций, подключенного первой парой входов к выходам блока вычислений фазных потокосцеплений, а второй парой входов, объединенных пофазно с входами блока обратного преобразования координат, подключенного к выходам первого преобразователя числа фаз, входы которого соединены с выходами датчиков фазных токов, выходы блока обратного преобразования координат подключены к входам обратных связей блока регуляторов составляющих тока статора, а выходы датчиков фазных токов подключены к входам обратных связей блока фазных регуляторов, отличающийся тем, что, с целью повышения точности управления частотой вращения и улучщения динамических свойств, введены три сумматора, третий преобразователь числа фаз и два множителя, первые входы которых объединены между собой и подключены к выходу измерителя частоты вращения, вторые входы множителей соединены с соответствующими выходами блока вычислений фазных потокосцеплений, а выходы множителей подключены к входам третьего преобразователя числа фаз, соединенного выходами с Од соответствующими первыми входами трех «vj сумматоров, вторые входы которых подключены к выходам блока фазных регулятоОд ров, а выходы сумматоров соединены с уп00 00 равляющими входами преобразователя частоты. 2. Электропривод по п. 1, отличающийся тем, что формирователь гармонических функций содержит- дополнительно четыре преобразователя аналог-код, два пропорционально-интегральных с фильтром элемента и два сумматора, выходы которых подключены к входам векторного анализатора, при этом первые входы сумматоров соединены через пропорционально-интегральные с фильтром элементы с выходами первого и второго преобразователей аналог-код, входы которых образуют первую пару входов форми
Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе синхронных двигателей, и может быть использовано преимущественно для- мощных приводов, например для приводов прокатных станов, безредукторных цементных мельниц.
Цель изобретения - повыщение точности управления частотой вращения синхронного двигателя и улучщение динамических свойств электропривода.
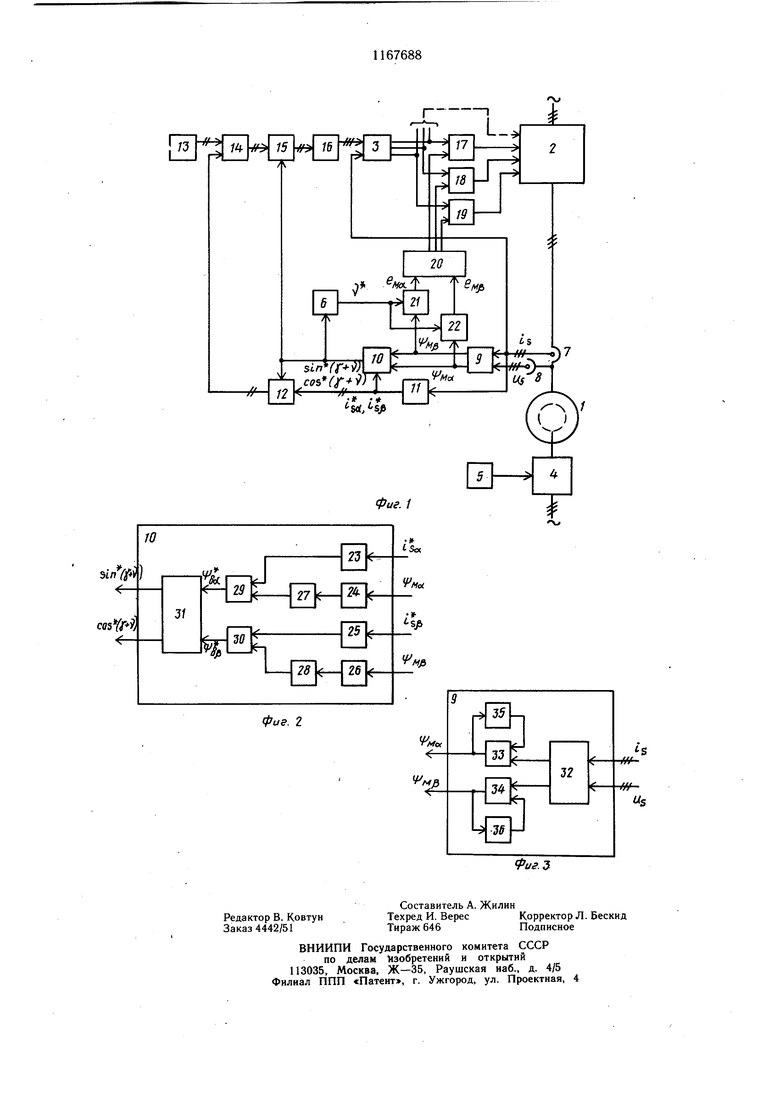
На фиг. 1 представлена функциональная схема электропривода с синхронным двигателем; на фиг. 2 - функциональная схема формирователя гармонических функций; на фиг. 3 - функциональная схема блока вычислений фазных потокосцеплений.
Электропривод содержит синхронный двигатель 1 (фиг. 1), преобразователь частоты 2, выходы которого подключены к статорньш обмоткам синхронного двигателя 1, а управляющие входы связаны с выходами блока 3 фазных регуляторов, регулируемый возбудитель 4, выход которого соединен с обмоткой возбуждения синхронного двигателя 1, а управляющий вход - с выходом блока управления возбуждением 5, измеритель частоты вращения 6, датчики фазных токов и напряжений 7 и 8 соответственно, установленные в статорных цепях синхронного двигателя 1 и подключенные к входам блока вычислений фазных потокосцеплений 9, формирователь гармонических функций 10 с двумя парами входов, первый преобразователь числа фаз 11, блок обратного преобразования координат 12, последовательно соединенные блок 13 задания составляющих тока статора, блок 14 регуляторов составляющих тока статора, блок прямого преобразования координат 15 и второй преобразователь числа фаз 16, выходы которого подключены к входам блока 3 фазных регуляторов, при этом входы опорных сигналов блоков прямого и обратного преобразований координат 15 и 12 пофазно объединены между собой и соединены с выходами формирователя гармонических функций 10, подключенного первой парой входов 5 к выходам блока вычислений фазных потокосцеплений 9, а второй парой входов объединены пофазно с входами блока обратного преобразования координат 12, подключенного к выходам первого преобразователя
Q числа фаз 11, входы которого соединены с выходами датчиков фазных токов 7, выходы блока обратного преобразования координат 12 подключены к входам обратных связей блока 14 регуляторов составляющих тока статора, а выходы датчиков фазных токов 7
5 подключены к входам обратных связей блока 3 фазных регуляторов.
В электропривод с синхронным двигателем введены три сумматора 17, 18 и 19, третий преобразователь числа фаз 20 и два множителя 21 и 22, первые входы которых
объединены между собой и подключены к выходу измерителя частоты вращения 6, вторые входы множителей 21 и 22 соединены с соответствующими выходами блока вычислений фазных потокосцеплений 9, а выходы
5 множителей 21 и 22 подключены к входам третьего преобразователя числа фаз 20, соединенного выходами с соответствующими первыми входами трех сумматоров 17, 18 и 19, вторые входы которых подключены к выходам блока 3 фазных регуляторов, а выходы
0 сумматоров 17, 18 и 19 соединены с управляющими входами преобразователя частоты 2.
Формирователь гармонических функций 10 (фиг. 2) содержит четыре преобразователя аналог-код 23-26, два пропорционально-интегральных с фильтром элемента 27 и 28, два сумматора 29 и 30 и векторный анализатор 31, выходы которого образуют выходы формирователя гармонических функций .10, при этом входы векторного анализатора 31 подключены к выходам сумматоров 29 и 30, первые входы которых.соединены через пропорционально-интегральные с фильтром элементы 27 и 28 с выходами первого и второго преобразователей аналог-код 24 и 26, входы которых образуют первую пару входов формирователя гармонических функций 10, вторые входы сумматоров 29 и 30 подключены к выходам третьего и четвертого преобразователей аналог-код 23 и 25, входы которых образуют вторую пару выходов формирователя гармонических функций 10.
В электроприводе с синхронным двигателем блок 13 задания составляющих тока статора, блок 14 регуляторов составляющих тока статора, блоки прямого и обратного преобразований координат 15 и 12, измеритель частоты вращения 6 и формирователь гармонических функций 10 выполнены в виде цифровых блоков.
Блок вычислений фазных потокосцеплений 9 (фиг. 3) содержит формирователь фазных ЭДС 32, к выходам которого подключены интеграторы фазных ЭДС 33 и 34, при этом введены два апериодических звена 35 и 36, каждое из которых включено в цепь отрицательной обратной связи соответствующего интегратора фазной ЭДС 33 и 34.
Электропривод с синхронным двигателем работает следующим образом.
На вход блока 13 задания составляющих тока статора с выхода блока регулятора частоты вращения (не показан) поступает сигнал задания момента синхронного двигателя 1, используемый в блоке 13 для вычисления сигналов задания составляющих тока статора. Выходные сигналы блока 13 подаются в блок 14 регуляторов составляющих тока статора на соответствующие пропорционально-интегральные регуляторы, где они сравниваются с сигналами фактических токов, формируемыми блоком обратного преобразования координат 12. Регулирование переменных электропривода можно осуществлять, например, в системе координат, связанной с продольной d и поперечной q осями индуктора, при этом входными сигналами блока 14 регуляторов будут сигналы продольной и поперечной составляющих тока статора. На входы блока обратного преобразования координат 12 поступают сигналы с датчиков фазных токов 7, преобразованные первым преобразователем числа фаз 11 из трехфазной системы координат в двухфазную с осями а, р. Для преобразования выходных сигналов блока 14 регуляторов к трехфазной системе используются последовательно соединенные блок прямого преобразования координат 15 и второй преобразователь числа фаз 16. Таким образом формируются задающие сигналы блока 3 фазных регуляторов, выходные сигналы которого через сумматоры 17, 18 и 19 воздействуют на управляющие входы преобразователя частоты 2, питающего обмотки статора синхронного двигателя 1. На входы обратных связей блока 3 фазных регуляторов поступают сигналы с датчиков фазных токов 7. Питание обмотки возбуждения синхронного двигателя 1 осуществляется от регулируемого возбудителя 4, управляемого выходным сигналом блока управления возбуждением 5. В блоке вычислений фазных потокосцеплений 9 на выходе формирователя фазных ЭДС 32 получают составляющие ЭДС статора в двухфазной системе по выходным сигналам датчиков фазных токов и напряжений 7 и 8. Указанные составляющие ЭДС статора поступают затем на входы интеграторов 33 и 34, на выходе которых получают сигналы фазных потокосцеплений.
Дрейф нуля аналоговых интеграторов 33 и 34 и погрешность входных элементов (датчиков 8 и 7 и формирователя 32) обусловливают применение неидеального интегрирования, при котором каждый из интеграторов 33 и 34 охвачен слабой отрицательной обратной связью через соответствующее апериодическое звено 35 и 36,. вкл1рчение которого позволяет существенно снизить погрешность неидеального интегрирования. При этом передаточная функция интегратора пре5 обретает следующий фид:
«//nW ёЯ+1)
Щр}-г.т,
где k - коэффициент усиления;
0 TS - постоянная времени интегратора; р -г- оператор дифференцирования. В формирователе гармонических функций 10 выходные сигналы интеграторов |)ма и -фмр преобразуются с помощью преобразователей аналог-код 24 и 26 в цифровую форму и поступают на входы пропорционально-интегральных с фильтром элементов 27 и 28, обеспечивающих компенсацию неидеальности интеграторов 33 и 34, при этом каждьш из этих элементов реализует в цифровой форме передаточную функцию, имеющую вид
1
.Т,Й-Т)
Выходные сигналы элементов (27, 28) а i 5 aj)p подаются на первые входы сумматоров 29,30, на вторые входы которых поступают сигналы i, isjs в цифровом виде полученные на выходах преобразователей аналог-код 23 и 25 по выходным сигналам первого преобразователя числа фаз 11.
На выходах сумматоров 29 и 30 получают сигналы , t|5fp, пропорциональные потоксцеплениям в осях о, f, статора от основного магнитного потока по следующим соотношениям:
. - X,
(iff I,
% s
Xse
где -сигналы фазных потокосцеплений статора;
sff -реактивность рассеяния статора.
В векторном анализаторе 31 по сигналам Tjjfa, формируются гармонические функции ) и ), где угол () характеризует угол поворота оси основного магнитного потока синхронного двигателя 1.
По указанным гармоническим функциям в измерителе частоты вращения 6 формируется сигнал V частоты вращения. Функции sm(Y+v) и cos(Y4-v) используются также в качестве опорных сигналов для блоков прямого и обратного преобразований координат 15 и 12.
Выходные сигналы интеграторов 33 и 34 г|зма и 1|)«р подаются на вторые входы множителей 21 и 22, на первые входы которых поступает цифровой сигнал частоты вращения Y от измерителя частоты вращения 6. Множители 21 и 22 формируют сигналы SMK. и Mt пропорциональные составляющим ЭДС вращения в двухфазной системе координат и определяемые соотнощениями
е...f, e.f v -i|3«.. В качестве множителей 21 и 22 применяются преобразователи, код-аналог, выпол-, няющие операцию умножения цифрового сигнала на аналоговый. Далее сигналы е-, и с помощью третьего преобразователя числа фаз 20 преобразуются к трехфазной системе и подаются на первые входы сумматоров 17, 18 и 19, чем образуется компенсирующая обратная связь по ЭДС вращения.
Указанная компенсация близка к идеальной, поскольку все вычисления составляющих ЭДС вращения осуществляются в фазных координатах (исключается погрещность преобразователей координат), а в канале компенсирующей связи отсутствуют фильтрующие элементы (компенсация ЭДС выполняется без запаздывания). Здесь роль фильтров необходимых для оглаживания сигналов с датчиков фазных токов и напряжений 7, 8, играют интеграторы 33 и 34.
Погрещность в сигналах грк, -фм проявляется только при очень низких частотах вращения. Влияние этой погрещности на режимы электропривода благодаря умножению ij;«« и г|)«р на сигнал частоты
вращения v несущественно. Фильтрующие свойства интеграторов 33 и 34 позволяют получить достаточно гладкие сигналы i|3.a, гр-е.
При соединении каждого из интеграторов 33 и 34 с соответствующим цифровым пропорционально-интегральным с фильт ром элементом 27, 28 вычисление сигналов фазных потокосцеплений ojjfa, ijfp, начиная с нулевой частоты, производится с высокой точностью, благодаря чему поддерживается работоспособность электропривода в режимах пуска и стоянки и обеспечивается высокая точность управления частотой вращения. При этом в электроприводе отсутствует электромеханический датчик углового положения ротора синхронного двигателя 1.
В случае использования в электроприводе непосредственного преобразователя частоты 2 с раздельным управлением в качестве сигналов, воздействующих на его переключающие входы, используются выходные сигналы блока 3 фазных регуляторов (на фиг. 1 необходимая для этого связь показана щтрихом). При реализованной в электроприводе компенсации ЭДС вращения изменение полярности каждого из трех выходных сигналов блока 3 фазных регуляторов и смена направления гладкой составляющей соответствующего фазного тока происходят практически одновременно.
Такое формирование переключающих сигналов обеспечивает плавное прохождение-зоны прерывистых токов, следствием чего также увеличивается точность управления частотой вращения.
Таким образом, введение в электропривод с синхронным двигателем трех сумматоров, третьего преобразователя числа фаз и двух множителей, рещает задачу компенсации ЭДС вращения, что позволяет улучщить динамические свойства электропривода и повысить точность управления частотой вращения в сравнении с известным рещением. 0 Применение в управляющей части электропривода цифровых блоков и введение в формирователь гармонических функций пропорционально-интегральных с фильтром элементов, компенсирующих неидеальность интегрирования, также обеспечивают повыще ние точности управления частотой вращения по сравнению с известным рещением.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод с синхронным двигателем | 1970 |
|
SU520682A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU675568A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
