Изобретение относится к области измерительной техники, преимущественно звуколокационной, и может быть использовано на горнодобывающих предприятиях для автоматизированного учета объема добытого поленого ископаемого во время его пе.ревозки внутришахтным, железнодорожным или автомобильным транспор. том; . . - .;
Известны способы и устройства для измерения уровня заполнеййя технологических емкостей и бункеров i основанные на эвуколбкацйи. Однако известные способы, йе могут быть использованы для автоматического измерения степени заполнения движущихся транспортник средств ,, поскольку не предназначены для TI . Кроме того, болыпинство из них требует пе риодической ручно калибровки аппаратуры с цеЛьк корректировки режимов измерительного устройства при изменении внешних условий или параметров объекта локации. В этих способах не предусматривается защита от грубых ошибок, возможных при потере на приеме акустических импульсов вследствие зеркального отражения или сильного
рассеяния ка отдельных участках лоцируемой поверхности транспортируемого мате эиала. Они имейт низкую точность, oбycл6влekнyIo мальом числом измеряемых трчек на лоцируемой поверхности. Известные способы предназнач;ены для регистрации абсолютных значений измеряемых расстояний и. для определения степени заполне0ния транспортных средств требуют дополнительного перерасчета результатов/измерений.
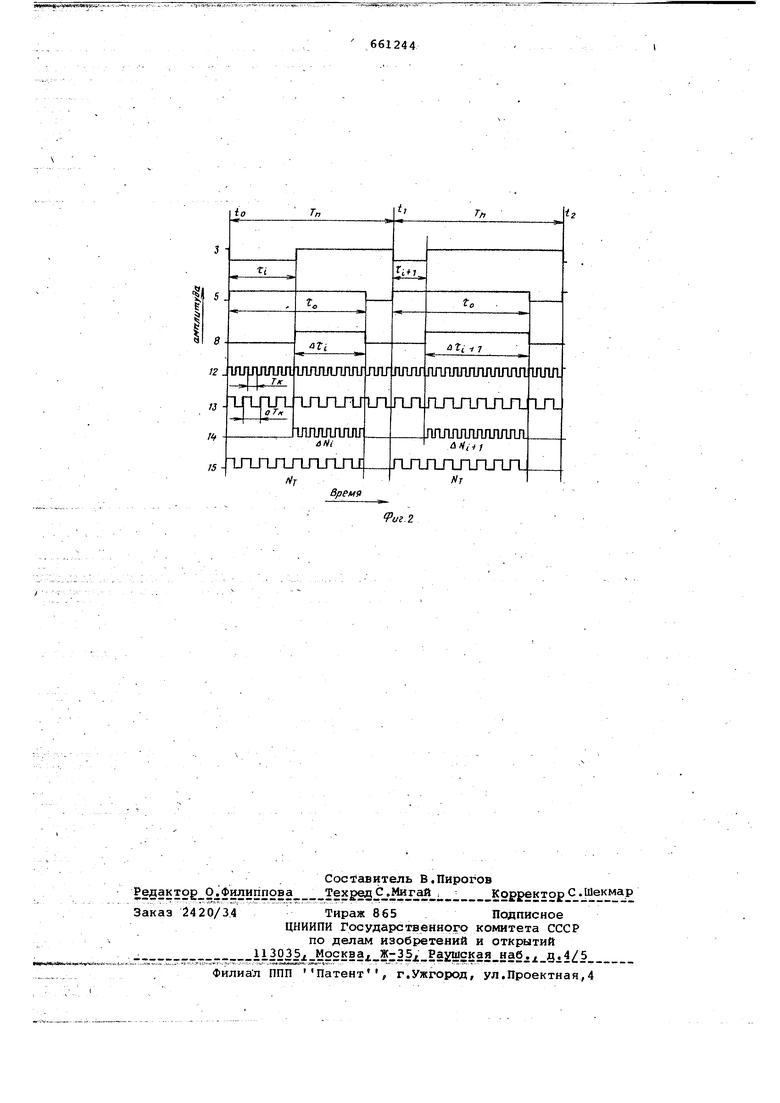
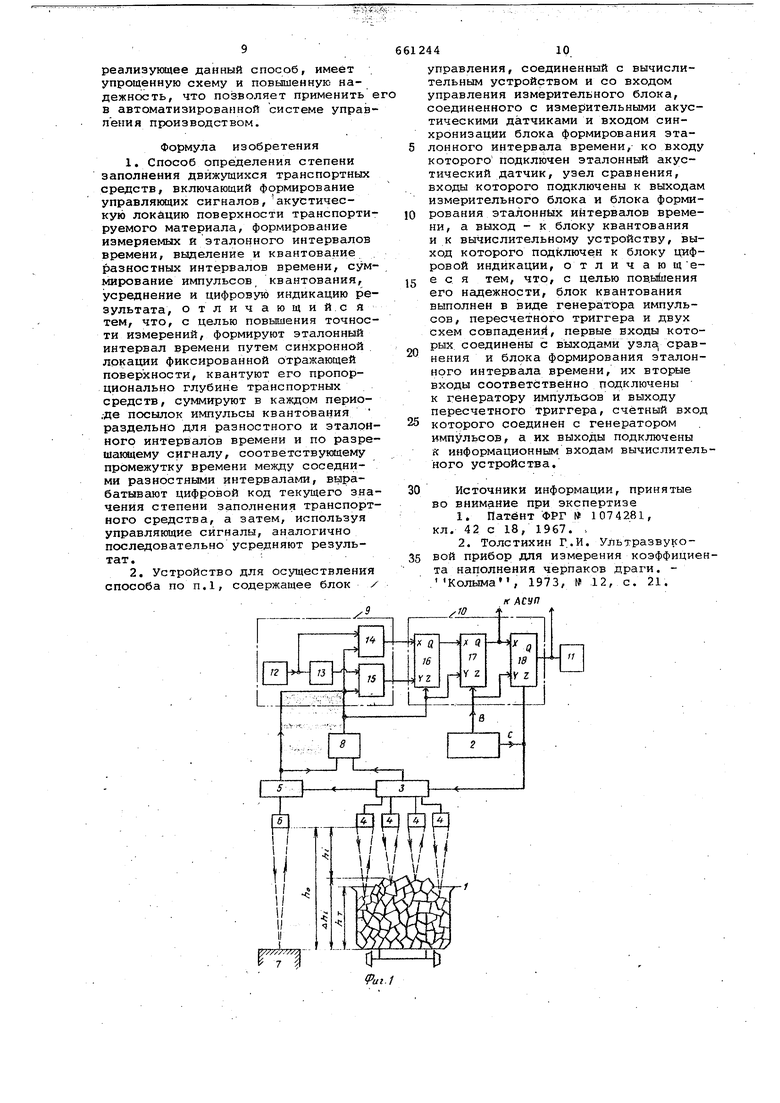
Наиболее близким по технической сущности я:вляется способ опредёле5 НИН степени запрЬнения движущихся транспортных средств, включающий формирование управляющих сигналов, акустическую локацию поверхности транспортируемого материала, фор0мирование измеряемых и эталонного интервала времени, выделение и квантование разностных интервалов времени, суммирование импульсов квантования, усреднение и цифровую ин5дикацию результата. Устройство для его реализации содержит блок управления, соединенный с вычислительным ус тройстй ом и со входом управления измерительного блока, соеди0ненного с акустическими датчиками 3 И входом .синхронизации блока формирования эталонного интервала времени, ко входу которого лодключе акустический датчик, узел сравнения входы которого подключены к. выходам измерительного блока и блока формирования эталонных интервалов времени, а выход - к блоку квантова ния и к вычислительному устройству выход которого подключен к блоку цифровой индикации 2. Однако известный способ недостаточно точен, а устройство довольно сложно. Целью изобретения является повышение точности измерений и надежнос ти устройства. Эта цель достигается благодаря тому, что формируют эталонный интервал времени путем синхронной локации фиксированной отражающей поверхности, квантуют его пропорциона льно гЛубинё транспортных средств, суммируют в каждом периоде посылок И1 пульсы квантсэвания раздельно для разностного и эталонного интервалов времени и по разрешающему сигналу, соответс.твующему прсжежутку времени Между соседними разностными интерва лами, вырабатывают цифровой код текущего значения степени заполнения транспортного средства в точке измерения, а затем,используя управляю пше сигналы, аналогичйо последовательно усредняют результат, В устройстве же блок квайтования выполнен в виде генератора импульсов, пересчетного триггера и двух схем совпадения, первые входы которых соединены с выходами узла Сравнения и блока фО1 4Ирования этаJioHiroro интеЕЖала времени, их вторае входы соответственно подключены к генератору импульсов и выходу пересчетного триггера, счетный ёхбД которого соединен с генераторо И1«тульсов, а их выходы подключены к информационным входам вычислительно го устройства. Предлагаемый способ характеризуе ся п6л 1бЙнёЭ1айМй1ШстШ :ре зуШ а измерений от изменений внешних усло вий, температурного дрейфа параметро электронной схемы и не требует коррекции показаний,( Это обусловлено тем, что изменение внешних условий вазйвает пропорциона:льныё изменения какизмеряемых, так и эталонных интервсшов времени, Ацалогично темп ратурный дрейф параметров, например периода следования квантующих импул СОВ7 Вызывает пропорциональные изме нения числа импульсов квантования, соответствующих глубине транспортиого средства,и уровню его заполнения в точках измерения. Поскольку д дальнейшей цифровой обработки испол зуются отношения этих величин, вычи 44 ляемых непосредственно после каждого измерения, то результат, несмотря на дрейф параметров, практически остается неизменным. При этом период следования квантующих импульсов ограничивается только быстродействием используемых элементов цифровой техники. Практически он может выбираться произвольно в широких пределах, в том числе и не кратным целой единице длины, например равным 1/5 или 1/20 см и т.д. Это уменьшает погрешность дискретной обработки информации. Кроме того, применительно к измерению степени заполнения рудой железнодорожных составов данный способ снижает погрешность измерений, возникакядую за счет неравномерности скорости движения состава. Для этого предусматривается последовательное определение средних коэффициентов заполнения: вначале по каждому вагону, а затем - по составу в целом. Выходные сигналы в стандартной цифровой форме могут быть использованы в автоматизированной системе управления производством (АСУП) , На фиг, 1 приведена блок-схема устройства; на фиг, 2 временные диаграммы, поясняющие работу устройс ТВ а, Вагон 1 находится в зоне действия блока 2 управления, представляющего собой устройство для контроля передвижения транспортных средств, К выходу С блока 2 подключен вход управления измерительного блока 3, соединенного с измерительными акустическими датчиками 4, Один из выходов блока 3 соединен со входом синхронизации блока 5 формирования эталонных интервалов времени, К блоку 5 подключен эталонный акустический датчик б, установленный на расстоянии 1io напротив фиксированной отражакядей поверхности 7, Выходы блоков 3 и 5 соединены со входами узла 8 сравнения йременных интервалов, прёдста:в ляющего собой схему совпадения. Выходы блока 5 и узла 8 подключены к блоку 9 квантования, который соединен с цифровым вычислительньм устройством 10„Входы вычислительного устройства 10 соединены с выходами блока 2 управления и узла 8 сравнения, а . к его выходу подключен блок црфЬовой индикации 11. БЛОК 9 квантования содержит генератор 12 импульсов, соединенный со счетным входом триггера 13 и входом схемы 14 совпадения. Выход; триггера 13 соединен со входом второй схемы 15 совпадения, другие входы схем 14 и 15 являются входами блока 9 и подключены к информационHtOM входам устройства 10, которое состоит из нескольких каскадно вкл ченных однотипных вычислительных блоков 16, 17 и 18. В. каждом из Этих блоков входы X и у являются I информационными, вход 1- упрЗвля щим. На выходе Q воспроизводится функция Q-X/y по разрешающему сигн лу на входе Z . Выход Q блока 16 с динен со входом X блока 17, вхбды блока 16 и X блока 17 соединены с хШбКГ уЭ)га 8 срав нения. Выход Q бл ка 17 соединен со входом X блока 1 входы Z блока 17 и У блока 18 сое динены с выходом В блока 2 управле Вход Z блока 18 соединен с выходом С блока 2 управления, выход Z блок 18 - с блоком 11 цифровой индикаци и является выходом всего устройств Он моЛет быть использован для подключения к АСУП. С этой же целью предусмотрен выход промежуточного результата с выхода Q вычислительно го блока 17. На фиг. 1 приняты .геометрически размеры: , lip- расстояние между измерительными акустическими датчиками 4 и дном вагона 1; измеряемое расстояние до лоцируемой поверхности руды в пери посылки i зондирующего импульса; i1i - уровень, заполнения вагона рудой в 1-й точке измерения; 1l.- геометрическая глубина .ва гона . На фиг. 2 приняты следунвдие обо начения: tj, Моменты начала отсчета интервалов времени, соответствующие моментам посылок зондирующих импульсов; Tj, - период следования зондирунядих импульсов ; TQ - эталонный интервал време ни, получаемый на выходе блока 5 при локации отражанвдей поверхности 7 ; Ti - измеряемый интервалвремени, получаемый на выходе блока 3 при локации поверхности руды в вагоне 1; Д - разностный интервал speмёни дТ , получаемый на выходе узла 8 сравнения TV - период следования импуль сов квантования; - число импульсов квант йва ния, заполняющих разностные инт1ервалы ; период следования импуль сов , квантующих эталонный интерЬалЦ..- число импульсов квантова ния, заполнякяцих эталонный интервал to. При прохождении состава с рудой под акустическими датчиками 4 блок 2 управления с псжлощью системы сигнальных датчиков вырабатьшает 44 сигналы управления работой всего устройства. На выходе С появляется импульс (сигнал состава), длительность которого Соответствует времени прохождения состава под измерительными датчиками 4. На выходе В в течение этого же интервала времени .появляется последовательность импульсов (сигналы-вагонов), равных по длительностиВремени прохождения отдельных вагонов. При этом локомотив и промежутки между вагонами автоматически исключаются из измерений. .. При наличии .ра:зрешаю1цего сигнала на выходе С блока 2 измерительный блок 3с помощью датчиков 4 осуществляет последовательную непрерывную локацию точек поверхности руды вдвижущемся вагоне 1 по.четырем профилям. На выходе блока 3 S каждом периоде посылок Тп появляются импульсы, длительность которых соответствует измеряемым интервалам времени и будет пропорциональна измеряемому расстоянию: .д - скорость звука. Синхронно с работой измерительного блока 3 блок 5 с помощью датчика 6 производит лоцированйе поверхности 7, находящейся на фиксированном расстоянии ho . При этом на выходе блока 5 в каждом-периоде посьтон Tj, появляются импульсные сигналы, длительностью (эталонные интервалы времени) Т - . ° С,в Выходные сигналы блоков 3 и 5 вызывают на выходе узла 8 появление сигналов, соответствующих разностным интервалам времени , которые с учетом выражений (1 и 2) пропорциональны уровням заполнения вагона рудой в точках измерений AY2(,--2uh, ,.(ъ-) Если во время очередной посылки происходит потеря отраженного сигнала, то, поскольку узел 8 представ- , ляет собой схему совпадения, работающую в положигельной логике, сигнал на его выходе в этом случае равен нулю, т.е. отсутствует (фиг.2). Таким образом автоматически исключаются из результатов измерений те периодыПОСЫЛОК, в которых отраженные сигналы по указанным ранее причинам не вызывают срабатывание измерительного блока 3. При;измерений степени заполнения рудой железнодорожных составов потери отраженных сигналов по тем или иным причинам составляют 10-15 % от общего числа измерений.
С выхода узла 8 сравнения интервалы времени поступают на устройство 10 и на входе блока 9 квантования, В блоке 9 эти интервалы квантуются в схеме 14 импульсами генератора 12с периодом следования TK. При этом число квантующих импульсов дМч для интервала определяется соотношением
AN-ut /T. W
Импульсы, составлягацие число ДМ, с выхода блока 9 поступают на вход X блока 16, где они суммируются, и их сумма,равная дМ{, преобразуется в цифровой код, например двоичный.
На другой вход блока 9 с выхода блока 5 поступают эталонные интервалы . Они преобразуются в число импульсов квантования, соответствующее глубине вагона, Это осумествляется путем уменьшения частоты следования импульсов квантования F| пропорционально отношению глубины вагона (liy) к расстоянию между уровнем дна К акустическими датчиками Chp). Обозначим
: /5
тогда период следования импульсов , к в а н тунядих и н терв ал Q , рав ен LTK.Следовательно, на втором выходе блока 9 (выход схемы совпйденйя) в каждом периодеследования Tjj появляется число квантующих импульсов
N,
соответствующее глубине ваграа
(6)
T-ciT.,
Для упрсадения процесса циф рового преобразования и соответствунвдего повышенйя.. надежности УСт1ЮйсТВа в нем датчики акустических блоков установлены относительно угхэвня дйа транспЬртного средства на расстоянии, раввом уйвоенной глубине tiQ«2tlY При этом с учетом выражения (5) коэффициентделения частоты Рцследованйя йштульсов кванттовайия равенl/5i, т.е.; а . ;... ,.:/--.;--.
в этом случае схема блока 9 упрощается и содержит Всего одйу бинарную пе1зесчё ную ячейку - триггер 13, рабртакиций Е1 счетном режиме..
Импульсы, составляющие число NTV поступают на информационный вход У вычислительного блока 16, где они суммируются, и их сумма, равная N7 , преобразуется в цифровой код, аналогичный коду числа AN-f .
После записи информации по входам X, У и окойчания разностного интервала , поступающего на управляющий вход , В блоке 16 вычисляется Отношение на выводе Q появляется цифровой код;результата, соответствующий текущему (мгновен- ,
ному) значению коэффициента заполнения K.J в точке измерения
К f7 N 4,
Последовательность цифровьцс кодов К-, поступает на вход X следующего вычислительного блока l7, а на его вход У подается последовательность разностных интервалов , отображающая число достоверных измереНИИ ж .
Поступление информации на входы к и У блока 17 продолжается в течение времени действия разрешаняаего сигнала вагона на управляющем Входе 2 , поступающего с выхода В блока 2 управления. Таким образом суммируются результаты единичных измерений в пределах каждого вагона. По окончании сигнала вагона прекра- , щается прохождение информации на входы X, У и вычисляется отношение
:|к.
г , соответствукяаее среднему Коэф. го
фициенту заполнения вагона К,, (транgjj Ьпортной единицы)
к/ Kr-V- :(ev .
Аналогично предыдущему, после„Q довательность цифровых кодов К пос/тупает на вход X вычислительного ; :блока 18, а на его вход У поступают сигналы вагонов с выхода В блока 2, отражающие число вагонов П в измеряемом составе. Поступление информации на входы X и У бло. ка 18 продолжается в течение времени действия разрЁЙак1Щего сигнала состава на управляющем входе Z f поступающего с Btiixofla С блока 2 Та40 КИМ путем суммируются результаты измерений по всем вагонам в пределах . сбСгСава. Йоркончании сигнала сос: тзйа п| ёкращае ся прохожйение информаций на входы X, У и вычисляется
45 отндшение , .соответствующее
, ; ;-; ; - К . ..
Среднему коэффициенту заполнения железнодорожного состава К
Vl,
(9)
Этот результат поступает в блок II цифровой индикации, преобразуется в десятичный код и сохраняется до
подхода следующего состава.
По переднему фронту следующего сигнаЛа состава происходит сброс предвадущих показаний, устройство приводится в исходное состояние и весь цикл
измерений повторяется.
Способ повышает точность определения степени заполнения движущихся транспортных средств, автоматизирует учет объемов транспортируемого материала и повышает загруженность
транспортных средств. Устройство, реализуквдее данный способ, имеет упрощенную схему и повышенную надежность, что позволяет применить в автоматизированной системе управ ления производством. Формула изобретения 1.Способ определения степени заполнения движущихся транспортных средств, включающий формирование управлякяцих сигналов,акустическую локйцию поверхности транспорти руемого материала, формирование измеряемых и эталонного интервалов времени, выделение и квантование разностных интервалов времени, сум мирование импульсов, квантования, усреднение и цифровую индикацию ре зультата, отличающийс я тем, что, с целью повышения точнос ти измерений, формируют эталонный интервал времени путем синхронной локации фиксированной отражающей поверхности, квантуют его пропорционально глубине транспортных средств, суммируют в каждом периоде посылок импульсы квантования раздельно для разностного и эталон ного интервалов времени и по разре Шсшяцему сигналу, соответствующему промежутку времени между соседними разностными интервалами, вырабатывают цифровой код текущего зна чения степени заполнения транспорт ного средства, а затем, используя управляющие сигналы, аналогично последовательно усредняют результат. 2.Устройство для осуществления способа по П.1, содержащее блок управления, соединенный с вычислительным устройством и со входом управления измерительного блока, соединенного с измерительными акустическими датчиками и входом синхронизации блока формирования эталонного интервала времени, ко входу которого подключен эталонный акустический датчик, узел сравнения, входы которого подключены к выходам измерительного блока и блока формирования эталонных интервалов времени, а выход - к блоку квантования и к вычислительному устройству, выход которого подключен к блоку цифровой индикации, отличаю щее с я тем, что, с целью повышения его надежности, блок квантования выполнен в виде генера тора импульсов, пересчетного триггера и двух схем совпадений, первые входы которых соединены с выходами узла сравнения и блока формирования эталонного интервала времени, их вторые входы соответственно подключены к генератору импульоов и выходу пересчетного триггера, счётный вход которого соединен с генератором импульсов, а их выходы подключены гс информационным входам вычислительного устройства. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ № 1074281, кл. 42 с 18, 1967. . 2.Толстихин Г..И. Ультразвуковой прибор для измерения коэффициента наполнения черпаков драги, .Колыма, 1973, If 12, с. 21. /г АСУП JL.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для эхолокационного контроля скважин | 1979 |
|
SU918913A1 |
| Многоканальное устройство для локации источника акустической эмиссии | 1981 |
|
SU989459A1 |
| Устройство для контроля передвижения транспортных средств | 1975 |
|
SU551688A1 |
| Способ определения производительности конвейера и суммарного веса материала и конвейерные весы | 1982 |
|
SU1041877A1 |
| Способ распознавания изображений и устройство для его осуществления | 1983 |
|
SU1238269A1 |
| Устройство для квантования временных сигналов | 1981 |
|
SU984017A1 |
| Цифровой низкочастотный частотомер | 1975 |
|
SU543882A1 |
| ОДНОКАНАЛЬНЫЙ УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 1973 |
|
SU395724A1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |
| Цифровой частотомер | 2019 |
|
RU2730047C1 |