осуществляют ..дополнительное порого вое сравнение. Устройство, реализующее способ, включает блок 1 координатного опроса, блок 2 привязки и усиления, дискретизатор 3, компа- р1аторы 4, блоки 5 совпадения, счетчики 6 и 21, синхронизатор 7, блок 8 программньи установок, измерительный блок 9, запоминающие блоки 10
Изобретение относится к технической кибернетике, в частности к области автоматического распознава- ния образов, и может быть использо вано для распознавания и классифика- ции в реальном масштабе времени спож ньйс изображений объектов и препара- тов.
Целью изобретения является повышение достоверности распознавания.
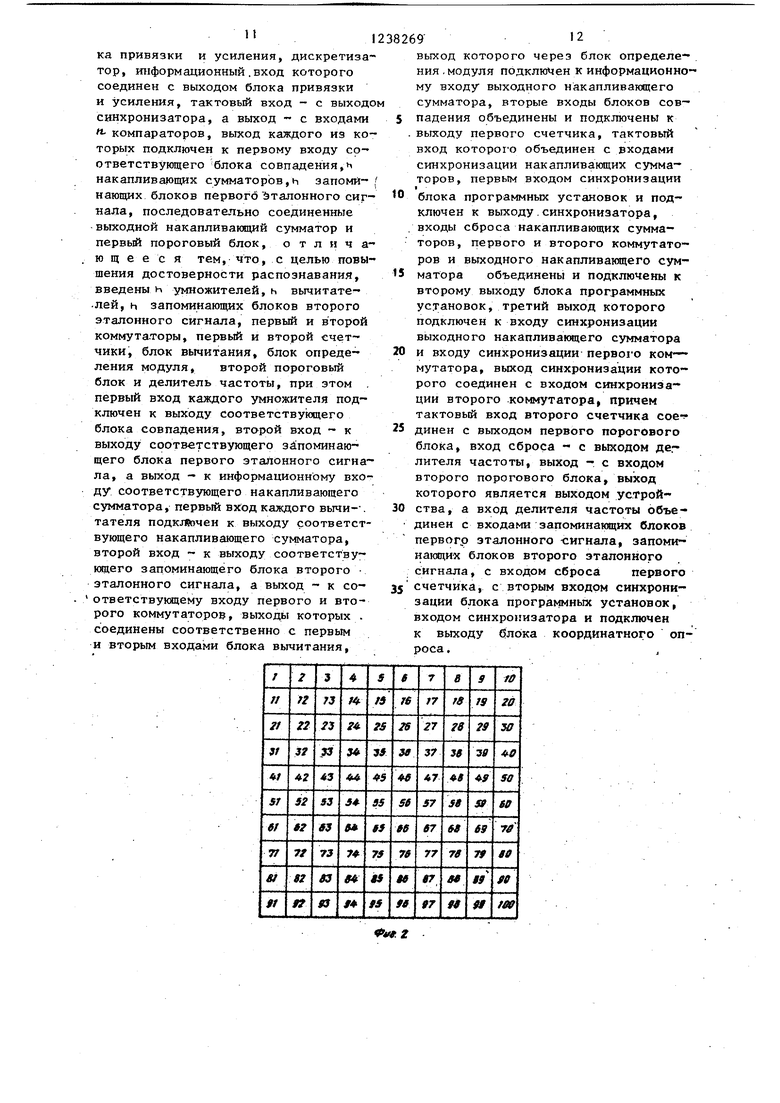
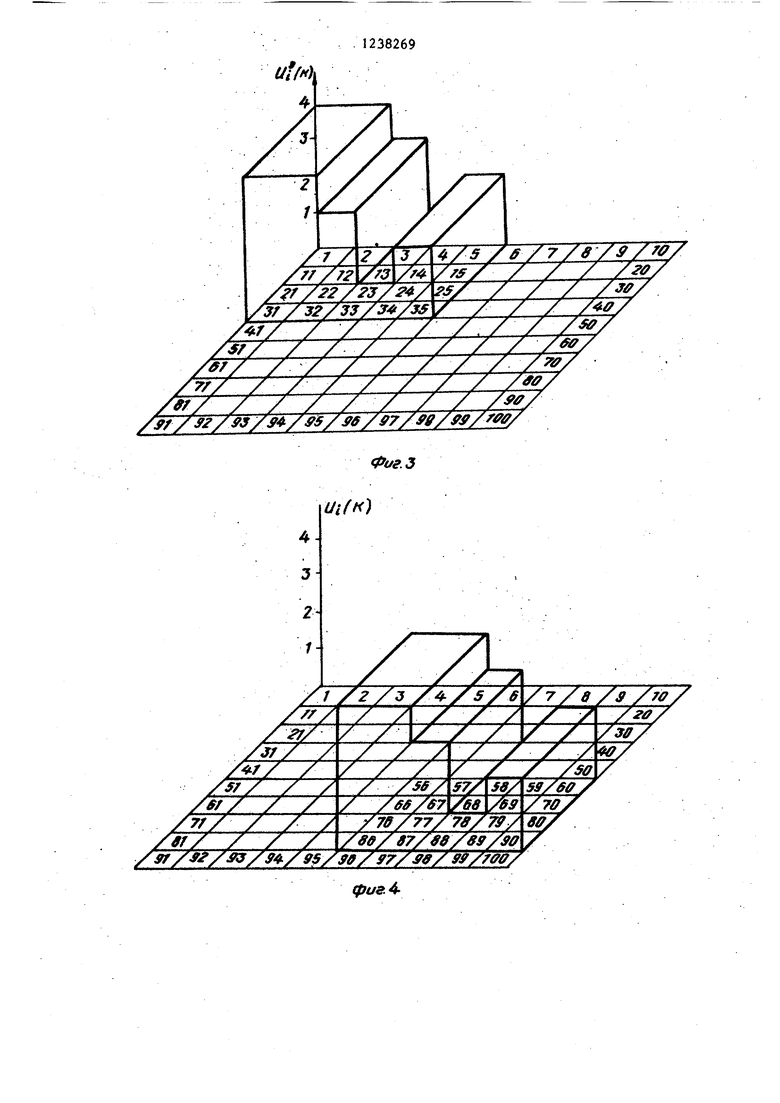
На фиг. 1 представлена структурная злектрическая схема устройства .для распознавания изображений на фиг. 2 - порядок преобразования оптического изображения в видеосигнал и его дискр.етизации; на фиг. 3 - распределение видеосигнала эталонного изображения , на фиг, 4 и 5 - распределение видеосигналов соответственного первого и второго зталон- ных сигналов; на фиг. 6 - диаграммы, поясняющие работу устройства,
Способ распознавания изображений заключается в следующем.
Исходное оптическое изображение преобразуют в электрический видеосигнал посредством, например, телевизионного датчика. Этот видеосигнал дис кретизируется таким образом, что сигнал в поле зрения телевизионного датчика может быть представлен в виде последовательности элем.ентарньк (дискретных) значений видеосигнала У(1) расположенных в порядке, показанном на фиг. 2, Операции дискрети- зации по строкам предшествует операция равномерного квантования, для осуществления которой определяют мак симальный и минимальный уровни видеосигнала и равномерно располагают п уровней квантования в интервале экстпервого ЭС, умножители И, накапливающие сумматоры 12, вычитатели 13, запоминающие блоки 14 второго ЭС, коммутаторы 15 и 16, блок I7 вычитания, блок .18 определения .модуля, выходной накапливаюпрй сумматор 19, пороговые блоки 20 и 23, делитель 22 частоты, 2 с и 4 з.п. ф-лы, 6 ил.
ремальных уровней. Для i-го уровня квантования (i«l,2,...,п) дискретный видеосигнал будет единичным, т.е. F (k), если U(k) U.+iaU-U(t ), где k - номер дискрета, пропорциональный интервалу времени от начала отсчета до момента появления сигнала U(t ), соответствующего дискретному сигналу U(k); - минимальный уровень видеосигнала; ли - шаг
квантования, ли - лх1-лий- ,
. п
Дискретный квантованный видеосигнал эталонного сигнала (фиг. 3) .описывается функцией:
F (k) ( 1-5, 11-15, 21-25,31-35, 10 для остальных k,
для ,5,11-13,15,21-23,25, г J31-33, 35,
lO для остальных k,
F (k)( Wi«k«l-3, 11-13,21-23,31-ЗЗу 3 10 для остальных .k;
F(k) ,21,22,31,32, 10 для остальных k.
Эталонные коэффициенты Q(i) об- ратно пропорциональны числу единичных дискретных сигналов для t -ro уровня квантования, т.е.
Q(i)« ; Q(2) i ; Q(3)- 1
20
W -b16
Сигналы для каждого i-го уровня квантования, пропорциональные взвешенным моментам первого порядка дискретного видеосигнала на i-м уровне квантования, для эталонного сиг- нала равны:
-f; (k)-Q(i);
k F;(k)-Q(l)«18;
k-F/{k)-Q(2) 17,75;
j
k-Fj(k)-Q(3) 17;
k-F.(k)-Q(4)16,5.
Таким образом, формируют эталонные коэффициенты и сигналы для i уровней квантования, пропорциональные взвешенным моментам первого порядка дискретного видеосигнала эталонного сигнала.
Для предъявляемого к распознаванию изображения аналогичным об- разом выполняют операции преобразования в электрический сигиал U(k), вцделения экстремальных уровней видеосигнала
Ц
дискретизации поля изображения на дискретов, квантования видеосигнала, на уровня с шагом ьУ, формирования для каждого i-ro уровня квантования сигнала Wj , пропорционального взвешенному моменту первого порядка дис- кретного видеосигнала на Данном уровне квантования. Дискретный квантованный видеосигнал исходного изображения, распределение видеосигнала которого приведено на фиг, 4, представляющего собой смещение эталонное, описьгаается функцией:
F (k) l k 56-60,66-70,76-80,86-9 10 для .остальных k;
, .П для k 56-58, 60, 66-68, 70, 1 J76-78, 80, 86-88,90, 10 для остальных k;
FjCk)
1 для k-56-58,66-68,76-78, 86-88; . 10 для остальных k;
F (k) lo для остальных k;
,„Сигнагш W. k Е (k) Q(i)« ilk F. (k) Q (i; определяют аналогично сигналам W., a именно: W, -73; ,75; ,5.
to
ts
20
5
0
5 0
0
5
Далее согласно предлагаемому способу вычитают из полученных сигналов W сигналы W. , т.е.
q.W,-W Для U- (1) (фиг. Л) получают:
q 73-18 55; q 72,5-17,75-55;
q 72-17-55; q 71,5-16,5-55. 3
/Сигнал отличия исходного и эталонного изображения S формируют путем попарного вычитания один из другого по принципу каладый с каждым полученных модулей разностей q, определения модулей результатов и их суммирования, т.е.
iq,-q,,-qj + iq, iq, , 4j-q,l
-, iqj- -i r lii + iq,-q3i .-qj iq,-qj .i ,i iq,-qj
Подстановка в это выражение полученных q. дает в .результате S-0, Сравнение полученного сигнала с пороговым сигналом показывает превышение порогового сигнала над сфор- мированньтм сигналом отличия.
Повторение операций способа в Р периодах (кадрах) видеосигнала исходного изображения дает в сумме Р превьшений порогового сигнала над мерой отличия S, Сравнение числа Р с пороговым числом приводит к принятию решения о соответствии исходного и эталонного изобра1Жений (фиг. 5). Выполнение операций способа дает следующие результаты:
W,-73; W,-72,5; W,-72,667; W,-72 q -55; ,75; ,667, -55,5; S-6,502.
В случае правильного выбора порогового сигнала его сравнение с величиной, сигнала отличия дает нулевой результат. Повторение операций в Р периодах видеосигнала изображения приводит к принятию решения об отличии исходного изображения от эталонного.
Способ позволяет дополнительно формировать сигнал R, пропорциональный смещению опознанного изображения относительно эталонного, равный
1 -1 видеосигнала согласно фиг.4, , что соответствует числу дискретов (координатам), на которое смещена каждая точка опознанного изображения относительно эталонно- го.
Устррйство для распознавания изображения (фиг, 1) содержит блок 1 координатного опроса, блок 2 привязки и усиления, дискретизатор 3, компараторы 4-1-4-п,блоки 5-1 5 совпадения, первый счетчик 6, синхронизатор 7, блок 8 программных установок, измерительный блок 9, запоминавэщие блоки 10-1-10-п первого эталонного сигнала умножители 11-1-И-п, накапливающие сумматоры 12-1-12-р,вычитатели 13-lr ., запоминающие блоки 14-1-14-п второго эталонного сигнала, первый и второй коммутаторы 15 и 16, блок 17 вычитания, блок .18 определения,модуля, выходной накапливанмций сумматор 19,; первый пороговый блок 20, второй счетчик 21, делитель 22 частоты и второй пороговый блок 23.
Блоки 5-1-5-п совпадения могут быть выполнены, например, на элементах И, число которых в каждом блоке 5-1-5-п равно разрядности первого счетчика 6. Первые входа каждого элемента И соединены с соответствующим выходом.юдного из разрядов первого счетчика 6, а вторые входы элементов И объединены и .на них подается выходной сигнал соответствующего компаратора 4-1-4-п.
Блок 18 определения модуля .предт ставляет собой схему преобразователя Прямых в дополнительных двоичных входных кодов в прямой код и может быть выполнен на последовательном, соединении элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и сумматора. Первый и второй коммутаторы 15 и 16 для каждого например первого, разряда входной информации, представляют собой синхронный коммутатор п 1, Каждьй из его И входов соединен с первым разрядом одного из п первых вычитателей 13-1- 13-п. Коммутация входов на один выход осуществляется синхронно с им пульсами синхронизации. Последовательность переключения входов жест- ко задана структурой коммутатора. По импульсу на входе сброса осуществляется начальная предустановка,
т.е. по дключение к выходу строго определенного входа. На выходе синхронизации первого коммутатора 15 сиг- нал появляется после коммутации последнего входа. Далее процесс коммутации циклически повторяется.
Устройство работает следующим образом.
Перед началом координатяо-времен- Hcfrb опроса яркостного рельефа изоб-.
ражения блоком 1 координатного опроса осуществляемого по синхронизирующим импульсам (фиг. 6}, пер-
вый счетчик 6 устанавливается в
состояние О. Синхронизатор 7 генерирует непрерывную последовательность импульсов (фиг. 6S), синхронную с синхроимпульсами блока 1 координатного опроса (фиг. 6а). Блок 8 программных установок формирует на втором выходе импульс установки О (фиг. 66), который обнуляет содержимое накапливающих сумматоров 12-1-.
12-ti, выходного накапливающего сум- матора 19 и устанавливает- в начальное состояние первый и второй коммутаторы 15 и 16, так, что первый и второй входы бл.ока 17 вычитания под-
ключаются к выходам соответствующих
вычитателей 13-1-13-п.
В интервале времени 0-t (фиг.6) блок 1 координатного опроса производит координатно-временной опрос яр-
костного рельефа изображения. Сигнал с его выхода усиливается-и привязывается по ypoBHjTO в блоке 2 привязки и усиления, причем коэффициент усиления задается с первого выхода блока 8 программных установок по измеренному измерительнь1м блоком 9 размаху вькодного сигнала блока 2 привязки и усиления. В дискретизаторе 3 видеосигнал дискретизируется с
периодом, определяемым периодом
импульсов на тактовом, входе с выхода синхронизатора 7 (фиг. 6Б). Дискре- тизированный видеосигнал с выхода дискретизатора 3 поступает на входы
компараторов 4-1-4-п, уровни срабатывания любых соседних из которых отличаются на шаг квантования uU. Выходные сигналы компараторов 4-1 г4-п .
поступают на первые входы соответст- вующих блоков 5-1-5-п совпадения, на вторые входы которых поступает код номера дискрета (или координата) с первого счетчика 6. Каждый блок
5-1-5-n совпадения осуществляет ло гическое умножение дсода координаты ; k на единичный дискретный видеосиг- нал соответствующего уровня U(k) квантования с выхода компаратора . На выходах блоков S-l-S-n совпадения образуются сигналит (коды) , пропорциональные моментам первого порядка единичного дискретного видеосигнала каждого из и уровней кванто вания. Эти сигналы в умножителях П- 1-11- умножаются на соответствунтеие эталонные коэффициенты с выходов соответствующих запоминающих блоков TO-l-IO-h, обратно пропорциональные плотностям распределения видеосигнала эталонного изображения по уровням квантования Q(i, суммируются в соответствующих накапливающих сумматорах 12-1-12-и синхронно с импульсами синхронизации (фиг. б5) на.входах синхронизации, К концу координатно-временного опроса (момент t, , фиг, 6) в этих накапливающих сумматорах образуются сигналы, пропорциональные взвешен ным моментам первого порядка дискретного видеосигнала на соответствующем уровне квантования W.
W.Ek F, (k)-Q(i).
К-.1
В интервале времени по синхронизирующим импульсам (фиг.ба) первый счетчик 6 устанавливается в состояние О, на выходах запоминающих блоков lO-1-lO-n появляются нулевые коды, а на вь1ходах запоми- нающих блоков 14-1-14-п появляются сигналы (коды), пропорциональные взвешенным моментам первого порядка эталонного иаображения для соответ- ствующего- уровня квантования W{ . При этом содержимое накапл1 1вающих сумматоров 12-1-12-п не увеличивается, (так как на его входах нулевые сигналы), а на выходах вычислителей 13-1-13-п- образуются разности сигналов Wi и W;
q,W-w;, .
Коммутаторы 15, 16 по импульсам синхронизации с третьего выхода блока 8 программных установок (фиг.бг) подключают выходы вычитателей 13-1- 13-к на первый и второй- входы блока 17 вычитания, осуществляя перебор всех возможных сочетаний i(j) сигналов уровней квантования. Число
формируемых разностей на выходе блока 17 вычитания равно числу синхронизирующих импульсов с третьего выхода блока 8 программных установок
S и равно числу перестановок из ь по 2.
Сигнал с выхода блока 17 вычитания через блок I8 определения модуля поступает на вход выходного накапливающего сумматора 19, где образу10 ется к моменту t сигнал отличия исходного и эталонного изображений S
8-ГСИ, .
i;1 J--1 .
Если исходное изображение есть 15 несмещенное эталонное, то и
. Если исходное изображение есть : смещенное эталонное, то все Wj отйичаются от W. на одинаковую величину R, пропорциональную смещению
20 q.R, а , Если исходное изображение Отличается от эталонного, то q /q и , В первом пороговом блоке 20 осуществляется сравнение сигнала S априорно определенным,
25 фиксированным.для данного эталонного изображения, сигналом порога С-, Если сигнал порога С больше или ра вен сигналу отличия S с выходного накапливающего сумматора 19, то на
30 выходе первого порогового блока 20 появляется сигнал логической F и второй счетчик 21 увеличивает содержимое на единицу:. После окончания синхронизирующего импульса ( фиг«6а)
5 на выходах запоминшощих блоков 10-1- 10-п вновь появляются сигналы зталон- ных коэффициентов, на выходах запо минающих блоков 14-1-14-п появляются нулевые сигналы, коммутаторы 15,
0 16 по импульсу с второго выхода блока 8 программных установок (фиг.6S) устанавливаются в начальное состояние. Содержимое накапливающих сумматоров 12-1-12-п и выходного иакап- .
5 : ливающего сумматора 19 сбрасывается в О, и блок I координатного опроса начинает новый цикл координатно-временного Опроса яркостного рельефа того же иаображения. К концу
0. второго синхроимпульса (фиг..6q) в выходном накапливающем сумматоре 19 вновь формируется сигнал отличия S, который сравнивается в первом пороговом блоке,20 с сигналом С, и в слу5 чае превыщения С Д S вто рой счетчик 21 вновь увеличивает содержимое на единицу. Далее процесс повторяется . Р циклов. К моменту t. (фиг, 6) во
втором пороговом блоке 23 вьтолняет- ся сравнение содержимого второго счетчика 21 с пороговым числом М, которое меньше или равно Р и опреде- ляется априорйо и постоянно для данного эталонного изображения. Если М больше числа единиц, подсчитанных вторым счетчиком 21, то на выходе второго порогового блока 23 появля- ется сигнал логической 1, характеризующий соответствие исходного изображения эталонному. Делитель 22 формирует импульс сброса второго счет чика 21 (фиг, 6А), и устройство го- тово для .распознавания следукицего изображения.
Величина сигнала первого порога С определяет допустимую степень отличия ИСХОД1ШХ изображений от эталон ного, а порог М определяет допустимую степень отличия в вероятностном плане. Пороги вза1 1мозависимы, су- ществует их оптимальное соответствие для требуемых вероятностей пра- вильного опознавания и ложного отождествления.
Устройство может формировать сигнал, пропорциональный координатам опознанного изображения. Для этого в него необходимо ввести сунматор выходных сигналов вычитателей ,12-1- l2-h и делитель образованной суммы
на фиксированное число п,
Формула изобретения
1, Способ распознавания изображений включающий периодическое последовательное преобразование исходного оптического изображения в видеосигнал, дискретизацию видеосигнала во времени, квантование видеосигнала на h уровней, разделение видеосигнала на и составляющих по уровням кван- тования, преобразование видеосигнала пороговое сравнение преобразованного видеосигнала, о т л и ч а ю- щ и и с я тем, что, с целью повышения достоверности распознавания, преобразование видеосигнала осуществляют .Р раз, после пороговр- го сравнения преобразованного видеосигнала осуществляют накопление с последующим дополнительным порого- вым сравнением, при этом преобразование видеосигнала вьтолняют путем последовательных амплитудной модуляции составляющих видеосигнала дис кретно нарастачяцим сигналом, амплитудной модуляции каждой из н составляющих видеосигнала, соответствующей составляющей первого эталонного сигнала, накопления каждой составляющей амплитудно-модулироваНно- го видеосигнала, уменьшения каждой . ЯЗИ составляющих накопленного видео- сигнала на величину соответствующей составляющей второго эталонного сигнала, формирования разностного сигнала ошибки, детектирований сформированного сигнала ошибки и его накопления ,
2,Способ по п, I, о т л и ч а- ю щи и с. я тем, что дискретно нарастающий сигнал формируют синфазно с видеосигналом, а его амплитуда пропорциональна временному положению текущего дискрета видеосигнала,
3,Способ по п, 1, о т л и - Чающийся тем, что каждая составляющая первого эталонного сигнала обратно пропорциональна плотности распределения видеосигнала эталонного изображения на соответствующем уровне квантования,
4,Способ по п, 1, о т л и ч а- ю щ и и с я тем, что каждая составляющая второго эталонного сигнала пропорциональна взвешенному моменту первого порядка дискретного видеосигнала эталонного изображения для соответствукяцего уровня кванто- вания.
5,Способ по п, 1, отличающийся тем, что формирование разностного сигнала ошибки осуществляют в соответствии с формулой
.
где-S - разностной сигнал ошибки; qiXj) - уменьшенная i-я (j-я) сое- тавляющая :накопленного .видеосигнала;
i(j) порядковый номер составляющей видеосигнала; h - число составляющих видеосигнала,
6,Устройство для распознавания изображений, содержащее последовательно соединенные блок координатного опроса, блок привязки и усиления, измерительный блок и блок программных установок, первый выход которого соединен с Управляющим входом бло1 1238269 2
ка привязки и усиления, дискретиза- выход которого через блок определения,модуля подключен к информационному входу выходного накапливающего сумматора, вторые входы блоков сов- 5 падения объединены и подключены к . выходу первого счетчика, тактовый вход которого объединен с входами синхронизации накапливающих сумма- . торов, первым входом синхронизации
тор, информационный.вход которого соединен с выходом блока привязки и усиления, тактовый вход - с выходом синхронизатора, а выход - с входами «- компараторов, выход каждого из которых подключен к первому входу соответствующего блока совпадения,fi накапливающих сумматоров,h запомй-. нающих блоков первого талонного сигнала, последовательно соединенные выходной накапливаклций сумматор и первый пороговый блок, отличающееся тем, что, с целью повышения достоверности распознавания, введены h умножителей,ь вычитателей, h запоминающих блоков второго эталонного сигнала, первый и второй коммутаторы, первый и второй счетчики, блок вычитания, блок определения модуля, второй пороговый блок и делитель частоты, при этом . первый вход каждого умножителя подключен к выходу соответствующего блока совпадения, второй вход - к выходу соответствующего зй поминаю- щего блока первого эталонного сигнала, а выход - к информационному входу соответствующего накапливающего сумматора, первый вход каждого вычи--. тателя подкхйочен к выходу соответствующего накапливающего сумматора, второй вход - к выходу соответству- нвдего запоминающего блока второго эталонного сигнала, а выход - к соответствующему входу первого и второго коммутаторов, выходы которых . соединены соответственно с первым и вторым входами блока вычитания.
выход которого через блок определения,модуля подключен к информационному входу выходного накапливающего сумматора, вторые входы блоков сов- падения объединены и подключены к выходу первого счетчика, тактовый вход которого объединен с входами синхронизации накапливающих сумма- . торов, первым входом синхронизации
блока программных установок и подключен к выходу.синхронизатора, входы сброса накапливающих сумматоров, первого и второго коммутаторов и выходного накапливанядего сумматора объединены и подключены к второму выходу блока программных установок, третий выход которого подключен к входу синхронизации выходного накапливающего сумматора
и входу синхронизации nepBoi-o ком- мутатора, выход синхронизации которого соединен с входом синхронизации второго коммутатора, причем тактовый вход второго счетчика соединен с выходом первого порогового блока, вход сброса - с выходом де. лителя частоты, выход - с входом второго порогового блока, выход которого является выходом устройства, а вход делителя частоты объединен с входами запоминающих блоков первогр эталонного -сигнала, запоминающих блоков второго эталонного сигнала, с входом сброса первого
счетчика, с вторым входом синхронизации блока программных, установок, входом синхронизатора и подключен к выходу блока координатного опроса .,
Uiff
/77/72
/22/ y/24/
/ УД
Ar/ / / /
4/5 / ff /7 /в
/ X /
гУХ / / /
/ / / /
/ / / / /
/ / / / / / / /fff/ / / / / / / /
/ / / / / / ХУ
/WT / / / / / / /
4/5 / ff /7 /в /ff
/ X /
гУХ / / / /yff/
/ / /
/ / / /
/ / / / / /
UifK}
Фиг.З
фаз. 4Uiff }
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| Устройство для контроля планарных структур | 1984 |
|
SU1167620A1 |
| СПОСОБ КАЛИБРОВКИ МАТРИЧНОГО ФОТОПРИЕМНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
RU1314800C |
| Устройство для формирования информации на телевизионном индикаторе | 1981 |
|
SU1075298A1 |
| Устройство определения координат объекта | 1988 |
|
SU1562980A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| Устройство для бинарного квантования телевизионного видеосигнала | 1983 |
|
SU1129745A1 |
| Устройство для считывания изображений | 1988 |
|
SU1642488A2 |
| Устройство для распознавания контуров изображений объектов | 1985 |
|
SU1359788A2 |
Изобретение обеспечивает повышение достоверности распознавания. Исходное оптическое изображение преобразуется в видеосигнал, кото- , рый дискретизируют, квантуют на п уровней и разделяют видеосигнал (ЕС) на п составляющих по уровням квантования. Далее осуществляют преобразование ВС путем последовательных амплитудной модуляции Л составляющих ВС дискретно нарастающим сигналом, амплитудной модуляции каждой составляющей ВС, соответствующей составляющей первого эталонного сигнала (ЭС), накопления каждой состав- лякяцей амплитудно-модулированного ВС, уменьшения каждой составляющей накопленного ВС на величину состав- лякхцего второго ЭС, формирования разностного сигнала ошибки, детектирования епо и накопления. Это осуществляют Р раз. Преобразованный та КИМ обраэом ВС сравнивают с порогом. Результат сравнения накапливают и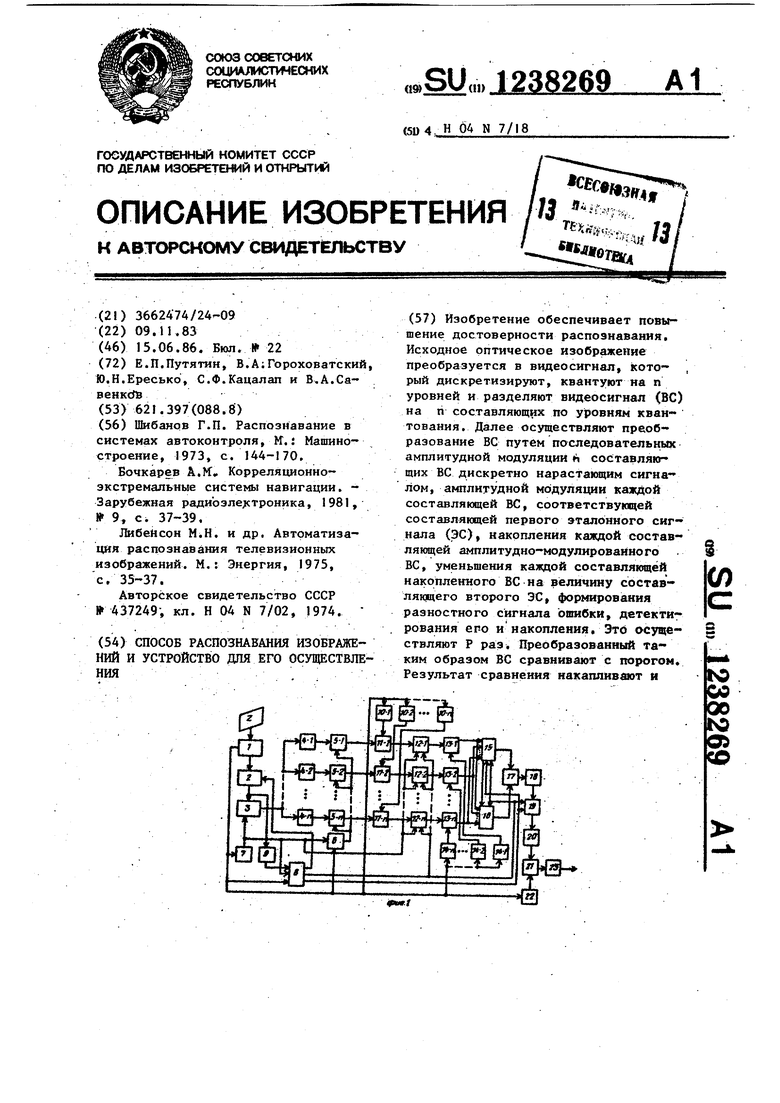
/.
XZ
/7Г
/
/ff/ /
/fff / / /
/7// / /
/fff/ / / /
X
/ /ff7/ffe
/
/ 7
/7ff/ 77/7ff/7 / ffff/
ff/g7/ffff/fff/m
S/ ffy/ 4 / S/ffff/y7/ffff/ y/ ffff/
Фие.5
о i: . .
1 -
« o
if
if
a
M
0
a
it n Фи9.9
Составитель Т.Афанасьева Редактор М.Келемей Техред М.Ходанич
Заказ 3306/59 Тираж 624Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий - 113035, Москва, , Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
S/ff /7
/ff/ff/7 /
yj
/
7 7 /
/ /fff/
/
/
M7
X
/
/ 7
Z.W
Sg/S Yffffy
/ /ff7/ffe
/7ff/ 77/7ff/7 / ffff/
1 -
if
a
M
it
i2
/J
//
/5
M
J
n .9
УЗ
М
- Корректор Л.Патай
| Шибанов Г.П | |||
| Распознавание в снстемах автоконтроля, М | |||
| J Машиностроение, 1973, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Бочкарев A.M. | |||
| Корреляционно- экстремальные системы навигации | |||
| - Зарубежная paдиbэлe cтpoникa, 1981, 9, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| и др | |||
| Автоматизация распознавания телевизионных изображений | |||
| М.: Энергия, 1975, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Устройство для распознавания изображений | 1971 |
|
SU437249A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
