зднотипности вагсяюв и направления их движения. При в составе различных по длине вагоиов или их движении в противсположном направлении программа работы устройства будет нарушена. Кроме 1OFO, yctpoMCTBo в таком исполнении не может бапг использовано по своему назначению, если состав приводится в движение идущим впереди локомотквсм, прохождение которого между дат- чшсами вызовет ложное срабатывание устройства.
Целмо изобретения является упрощение устройства и повышение его надежности.
Это достигается тем, что в устройство введены ннтегрируничий элемент, пороговый элемент, триггер и элемент И, выход усилителя подключен к входу интегрирующего элемента и первым входам триггера и элемента И, вход последнего соединен с выходом триггера, выход интегрирующего элемента через пороговый элемент соедижн со вторым входом , выходы элемента И и Порогового элемента соединены с выходами устройства.
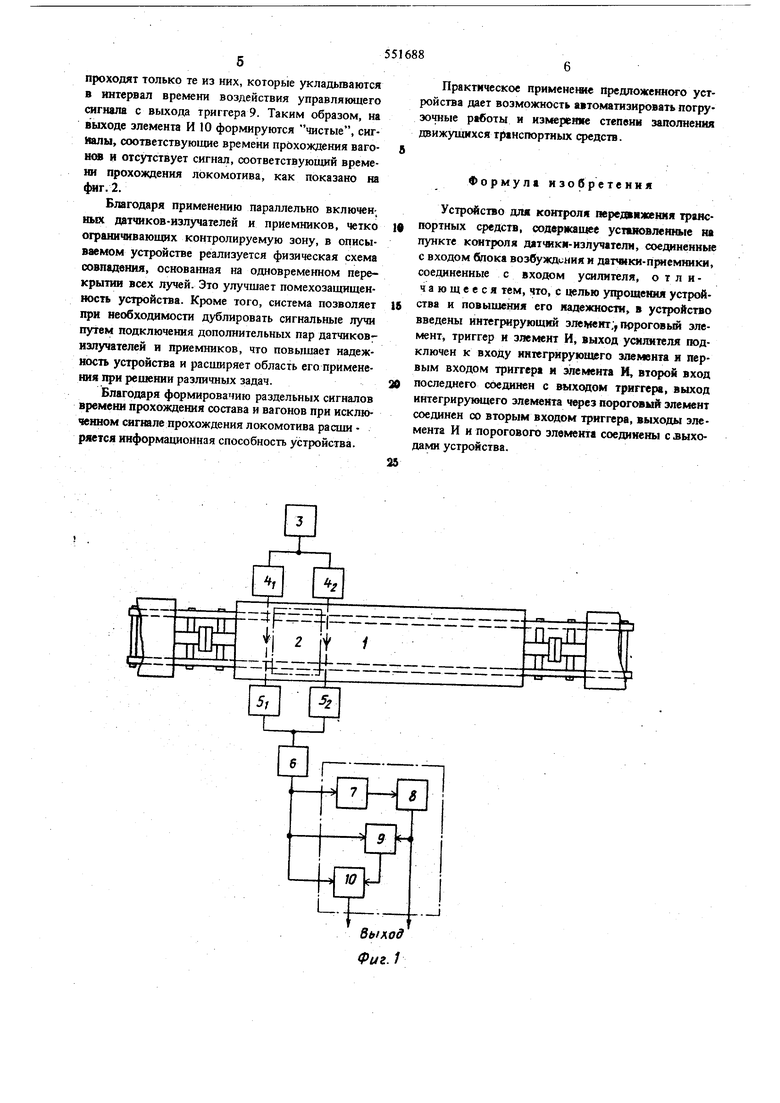
На фиг. 1 изображена блок-схема устройства.
Она содержит следующие узлы: транспортное средство (вагон) 1, рабочую зону 2, блок возбужде шя 3; датчики-излучатели 4i - 4}, датчикиприемники 5i - 52, усилитель 6, интегрирующий элемент 7, йороговый элемент 8, триггер 9, элемент И 10.
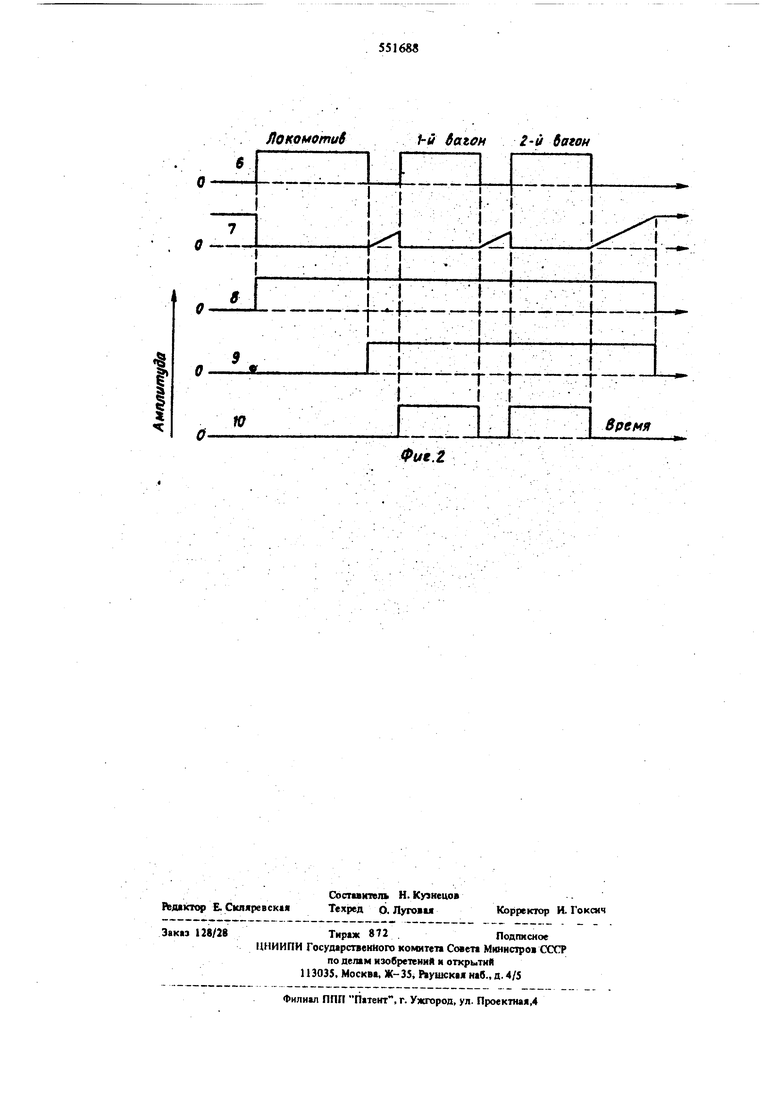
На фиг. 2 проведены временные диаграммы, поясняющие работу устройства.
Вагон 1 находится в рабочей зоне 2 погрузочного или измерительного приспособления. Блок 3 возбуждения соединен с параллельно включенными датчиками-излучателями 4i - 4j, в створе с которыми на противоположной стороне колеи расположены датчики-приемники 5) - 5j, причем, расстояние парами датчиков 4, - 5, и 4j-5, вдоль колеи соответствует длине рабочей зоны 2. Датчики-Приемники параллельно подключены ко входу усилителя 6, к вь1ходу которого подключены интегрируюишй элемент 7, соединенный с пороговым элементом 8, триггер 9 и элемент И 10, образующие схему формирования выходных сигналов. Второй вход триггера 9 подключен к выходу порогового элемента 8, а выход триггера 9 соединен со вторым входом элемента И 10.
Выходы элемента И 10 и порогового элемента 8 являются выходами устройства.
Устройство работает следующим образом.
До прихода транспортного-средства (например, железнодорожного состава) пучк межДу датчиками 4) - 4 И 5i - 52 открыты и на выходе усилителя 6 сигнал равен нулю. Соответственно раВны нулю выходные сигналы элемента И 10 и порогового элемента 8. При подходе железнодорожного состана, идущий впереди, перекрывает один из лучет между парами датчиков 4|, 5| или 42, Sj. При зтом устройство останется в неходком состоянии так как на входе усилителя 6 будет присутствовать сиггал от неперекрытого луча между
: второй парой датчика. Только после его пере крьгшя на выходе усилителя 6 тпоявится (жгнал,: соответствующий по длительности времени прохождения локомотива через оба створа датчиков 4i -4j и 5i - 5j. При открывании одного из лучей | сигнал на выходе усилителя 6 вновь упадет до нуля и будет отсутствовать в течение интервала времени, соответствующего прохождению через створы датчиков 4| - 42 и 5i - 52 промежутка сцепки между локомотивом и первым вагоном. Затем произойдет перекрытие обоих лучей корпусом первого вагона и на выходе усилителя 6 появится второй сигнал, длительность которого будет соответствовать времени прохождения этого вагона через оба створа датчиков. При дальнейшем движении состава импульсная картина на выходе усилителя 6 будет повторяться до тех пор, пока не пройдет последний вагон. Таким образом, прохождение состава вызьюает на выходе усилителя 6 появление последовательности прямоугольных сигналов.
Временные диаграммы на фиг. 2 соответствуют прохождению состава, состоящего из локомотива и двух вагонов.
Передний фронт сигнала локомотива вызьтает сброс до нуля выходаого напряжения интегрирующего элемента 7 и срабатывание порогового элемента 8, выполненного, например, по схеме Шмитта. Во время действия сигналов с выхода усилителя 6 интегрирующий элемент 7 удерживается в состоянии сброса, а в промежутках между ними происходит нарастание выходного напряжения на выходе этого элемента, как показано на временной диаграмме (фиг. 2). Постоянная времени интегрирующего элемента 7 выбрана с таким расчетом, чтобы в течение максимально возможного интервала времени, соответствующего расстоянию между вагонами, обеспечить нарастание выходного напряжения до величины, не превышающей порога срабатьшания элемента 8. Благодаря этому возврат порогового элемента 8 в исходное состояние может произойти только после прохождения последнего вагона, когда время нарастания выходного напряжения интегрирующего элемента 7 ока:зывается достаточным для достижшия порога срабатывания элемента 8. Таким образом. На выходе порогового элемента 8 появляется непрерьшный сигнал, соответствующий по длительности (с небольшой поправкой на постоянную интегрирующего элемента 7) времени прохождения всего состава через систему датчиков 4i-42, 5|-5s устройства.
Задний фронт сигнала локомотива вызьтает срабатьшание триггера 9, з его возврат в исходное состояние происходит по заднему фронту сигнала состава, поступающему с выхода порогового элемента 8. № выходе триггера 9 формируется сигнал, соответствующий времени прохождения состава без локомотива. Этот сигнал управляет работой элемента И 10 по одному из входов. На другом вход элемента И поступает последовательность сигналов с выхода усилителя 6. На выход элемента И 10
проходят только те из них, которые укладьюаются в интервал времени воздействия управляющего сигнала с выхода триггера 9. Таким образом, на выходе элемента И 10 формируются чистые, сигналы, соответствующие времени прохождения вагонсйа и отсутствует сигнал, соответствующий времени прохождения локомотива, как показано на фиг. 2.
Благодаря применению параллельно включен; ных датчиков-излучателей и приемников, четко ограничивающих контролируемую зону, в описываемом устройстве реализуется физическая схема совпадения, основанная на одновременном перекрытии всех лучей. Это улучщает помехозащищенность устройства. Кроме того, система позволяет при необходимости дублировать сигнальные лучи путем подключения дополнительных пар датчиковизлучателей и приемников, что повышает надежность устройства и расишряет область его применения при решении различных задач.
Благодаря формированию раздельных сигналов времени прохождения состава и вагонов при исклю«кнном сигнале прохождения локомотива расщн ряется информационная способность устройства.
Практическое применеше предложенного устройства дает возможность автоматизировать погрузочные работы и измерение степени заполнения движущихся транспортных средств.
Формула изобретения
Устройство для контроля передаяжения анспортных средств, содерисашее устаиовленные на пункте контроля датадкм-излучатели, соединенные с входом блока возбуждения к дагики-приемники, соединенные с входом усилителя, отличающееся тем, что, с целью упрощения устройства к повышения его надежност, в устройство введены интегрирующий зленкит;, пороговый элемент, триггер и злемеит И, выход у я1лнтеля подключен к входу интегрирующего злемеита к первым входом триггера и элемента И, второй вход последнего соединен с выходом триггера, выход интегрирующего элемента через пороговый элемент соединен со вторым входом триггера, выходы элемента И и порогового элемента соединены с лыходами устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля передвижения транспортных средств | 1978 |
|
SU780022A1 |
| Способ определения степени заполнения движущихся транспортных средств и устройство для его осуществления | 1976 |
|
SU661244A1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ НЕИСПРАВНОСТЕЙ КОЛЕС ПО КРУГУ КАТАНИЯ | 1972 |
|
SU328020A1 |
| Устройство для счета числа пассажиров транспортного средства | 1985 |
|
SU1251139A1 |
| Устройство для считывания номера транспортного средства | 1979 |
|
SU787235A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| Устройство для автоматического определения местонахождения и направления движения маневрового локомотива | 1991 |
|
SU1792865A1 |
| Устройство для контроля положения деталей в зоне автосцепки вагонов | 1990 |
|
SU1794734A1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
Г
fl 2 |t 1
yl 2 |Y 7
rj T
n - иг. j г
Ш1
г--:
Фие 2
