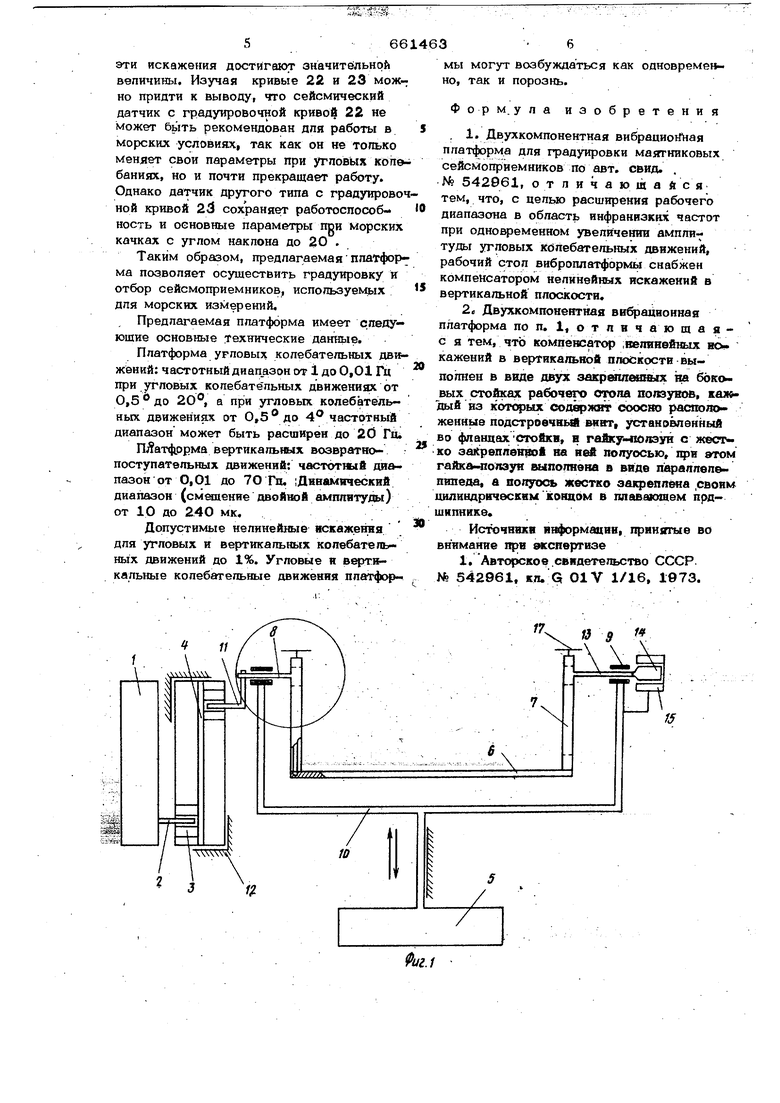
личении амплитуды угловых колебат льHbix движений.,, . Для этого рабочий стол виброплатформы снабжен компенсатором нелинейных искажений в вертикальной плоскости, компенсатор нелинейных искажений в верти кально плоскости выполнен в виде двух з;акрепленных на боковых стойках рабочего стола ползунов,, каждый ий котортх содержит соосно расположенные подстроенный винт, установленный во фланцах стойки, н гайку-ползун с жестко закрепленной на ней полуосью, при этом гайкаползун вьшолнена в виде паралЛёлёпипё да, а полуось жестко закреплена своим цилиндрическим концом в плавающем подшипникеНа фиг. 1 изображена ттредлагаемая двухкомпонантная вибрационная платформа; на фиг, 2 - конструкция компенсатора нелинейньк, искажений, вертикальный разрез; . 3 приведена осциллограмма с разбалансированным рабочим столом платформы, на фиг. 4 - осциллограмма с отбалансированным столом компенсатором нелинейных искажений в вертикальной плоскости. Двухкомпонентная вибрационная плат форма состоит из двух независимых с регулируемой скоростью редукторов и маховиков приводных механизмов, один из которых 1 служи для возбуждения угловых копебательвых движений вокруг горизонтальной оси и соединен кривошипом 2 через камень 3 с узлом 4 развязки, вьшолненвым в виде четырехзвённого кулисного механизма, аругой 5 - для вертикальных, возвратно-лоступательных движений, и о&цего рабочего стола, имеквдего ос новаяие 6, две бокэвьрс стойки 7, снабженных компенсаторами нелинейных искажекий, в вертикальной плоскости полуоси 8 котс)ых установлены в плавающих гюдшип ннках О, соединенных верхннмв обоймами d кронштейном Ю вёртнкапьного возвратйо-поступательного привода 5. Одна из полуосей 8 имеет разъемное соедяненне с рычагом 11, второй ковед которого свяк зав с кулисой, паревлешакнцёйся в горизов- тальвой плоскости по направляющим ст&нннь 12. Другая полуось 13 жестко соединена с рамкой-катушкой 14 контрольного прибора угловых коаебвтельвых дви женнй, помешенной в лввейное попе IKK. тоавного магввта 15, уставовпенного на кронштейне 1О, Компевсатор нелинейных напояжевий в вертикальной плоскости (фнг. 2) состоят з ползуна, содержащего подстроечтый инт 16 со шляпкой 17, втулку 18 и гайу-ползун 19 с жестко закрепленной на ней полуосью. На осциллограммах изображены (фиг. 3 и 4) кривые 20 и 21, 22, 23 контроля движения платформы с углом наклона до 20 от эталонного генератора с нелинейными искажениями до 0,7% от вертикальных сейсмометров различных типов. Предлагаемая платформа работает следующим образом. Вначале подстрречными винтами устанавливают рабочий стол в нижнее ,жение (фиг. l), имеющее устойчивое состояние равновесия. Затем устанавпивают для градуировки сейсмические датчики с. таким расчетом, чтобы центр тяжести установленных приборов лежал в плоскости перпендикулярной оси вращения рабочего сто ла. Полуось 8 освобождают от рычага 12 и проверяют балансировку стола в горизонтальной плоскости. При правильной балансировке плоскость стола должна принять строго горизонтальное положение, определяемое соответствующим уровнем. В случае необходимости добиваргся балансировки перемещением приборов относительно оси вращения стола. Дадёе закрепляют приборы и производят балансировку в вертикальной плоскости при помощи подстроечных винтов 16. Поворачивая винты 16 против часовой стрелки, добиваются такого апериодического процесса, при котором стол останавливается в любой точке своего рабочего динамического диапазона, не совершая при этом колебательных Движений. Горизонтальность оси вращения стола определяется уровнем и при необходимости производет. выравнивание одним из подстроечных винтов. И, наконец, полуось 8 отбалансированного рабочего стола соединяют с рычагом 11, устанавливают необходимые значения угла поворота и величины смешения вертикальных колеба тельных движений стола, вкл1рчают моторы, устанбывливают необходимые частоты в производят градуировку и отбор сейсмических датчиков. Сравнивая осциллограммы на фиг. 3 н 4 можно убедиться, что предлагаемая платформа с компенсатором нелинейных искажений в вертикальной плоскости mvJeет нелинейные искажения до 1%, т.е. близкое к эталонному генератору в области инфранизких частот, тогда как в разбалансврованной известной платформе эти искажения достигают значительной величины. Изучая кривые 22 и 23 мож но придти к выводуг что сейсмический датчик с градуировочной кривой 22 пе может быть рекомендован для работы в морских условиях, так как он не только Меняет свои параметры при угловых коп& баниях, но и почти прекращает работу. Однако датчик другого типа с градуирово ной кривой 23 сохраняет работоспособность и основные параметры при морских качках с углом наклона до 20 . Таким образом, предлагаемая платфор ма позволяет осуществить градуировку и отбор сейсмоприемников, испопьзуемь1х для морских измерений. Предлагаемая платформа имеет следующие основные технические данные. Платформа угловых колебательных дви жений: частотный от 1 до 0,01 Гц при угловых колебательных движениях от 0,5® до 20°, а при угловых колебательных движениях от 0,5° до 4 частотный диапазон может быть расширен до 20 Гш ПДатфррма вертикальных возвратнопоступательных движений: частотный диапазон от 0,01 до 7 О Гц, ;Динамический диапазон (сметцение двойной амплитуды) от 10 до 240 мк. Допустимые нелинейные искаже1тня для угловых и вертикальных колебатель ных движений до 1%. Угловые н вертикальные колебательные /движения платфорМЫ могут возбуждаться как одновременно, так и порознь. Ф о р м.у ла изобретения . 1. Двухкомпонентная вибрационная платформу для градуировки маяггниковых сейсмоприемников по авт. свид. № 542961, отличающейся тем, что, с целью расширения рабочего диапазогна в область инфранизках частот при одновременном увеличении амплитуды угловых кблебательных движений, рабочий стол виброплатформы снабжен компенсатором нелинейных искажений в вертикальной плоскости, 2. Двухкомпонентная вибрационная платформа по п, 1, о т п н ч а ю щ а я с я тем, что компенсатор нелинейных нокажений в вертикальной плоскости выполнен в вЕде двух закретлтп&пс ва бок, вых стойках рабочего отола попзувов, из которых содержит соосяо расположенные подстровчшЛ в«нт, установленный во фланцахСтойке, в гайк7-«йдэун с жест ко закрепленной на ней полуосью, 1фи этом гайка опэун сшполнвна в виде шфаллелепипеда, а полуось жестко закреплена ,свонм илиндрическимконцом в плавающем прдипнике. Источники информации, принятые во внимание при ясснертизе 1, Авторское .свидетельство СССР. № 542961, кл. Gt 01V 1/16, 1973.
/
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исследования сейсмоприемников | 1985 |
|
SU1430922A1 |
| Однокоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2815852C1 |
| Двухкоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2808155C1 |
| Способ возбуждения вибрационных сейсмических сигналов и устройство для его осуществления | 1983 |
|
SU1277033A1 |
| Устройство для определения параметров сейсмоприемников | 1975 |
|
SU557342A1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| Виброплатформа для исследования сейсморазведочной аппаратуры | 1977 |
|
SU656010A1 |
| Низкочастотный вибростенд | 1978 |
|
SU729462A1 |
| Устройство для тренировки спортсменов | 1987 |
|
SU1551388A1 |
| Устройство для генерирования вибрационных сейсмосигналов | 1983 |
|
SU1105840A1 |

