1
Изобретение относится к устройствам автоматического управления процессом бурения и может применено в станках для алмазного бурения, оснащенных плавнорегулируемыми приводами подачи и вращения бурового инструмента.
Известна система автоматического регулирования параметров процесса бурения, состоящая из датчиков осевой нагрузки, скорости вращения, блока умножения сигналов осевой нагрузки на скорость вращения, системы стабилизации произведения указанных параметров и автономного счетно-рещающего устройства 1.
На основании информации о параметрах процесса бурения автономное счетно-рещающее устройство определяет желаемое значение произведения осевой нагрузки на скорость вращения. Это значение буровик при помощи задатчика вводит в систему стабилизации этого произведения. Система регулирования стабилизирует произведение указа нных параметров путем регулирования осевой нагрузки обратно пропорционально скорости вращения..
Недостатком этой системы является неполная автоматизация регулирования. В процессе управления бурением участвует человек, устанавливая рекомендуемое произведение параметров. Кроме того, система Практически автоматически регулирует только осевую нагрузку, а скорость вращения изменяется независимо от буровика.
Эти недостатки исключают возможность автоматического нахождения оптимальных сочетаний осевой нагрузки и скорости вращения, снижая технико-экономические показатели процесса бурения.
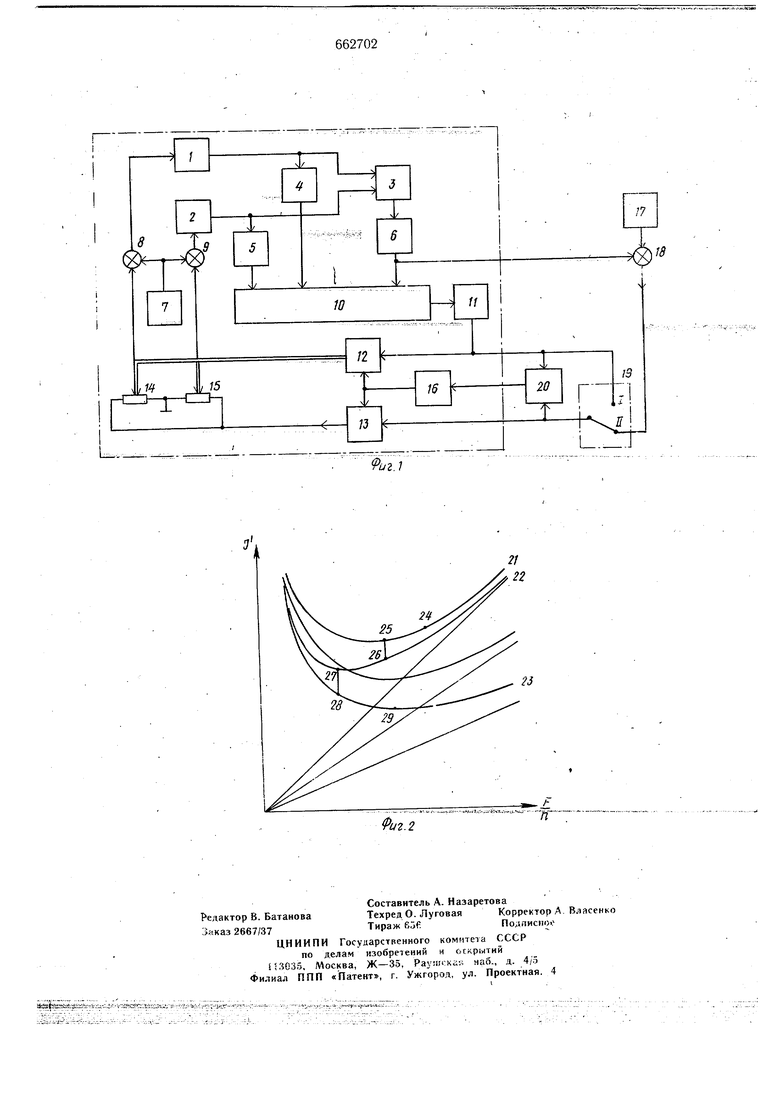
По основному авт. св. № 554399 известна система управления процессом бурения, состоящая из датчиков осевой нагрузки F, скорости п вращения коронки, механической скорости бурения, блока умножения осевой нагрузки на скорость вращения, блока деления осевой нагрузки на скорость вращения, измерителя буримости горной породы, измерителя интенсивности износа коронки, определителя проходки на коронку, экстремального регулятора, коммутатора, исполнительных механизмов с задающими потенциометрами, двух суммирующих устройств, вырабатывающих сигналы, пропорциональные осевой нагрузке и скорости вращения коронки, и регулируемых приводов подачи и вращения 2. Система управления процессом бурения работает следующим о&разом. Определитель проходки на коронку на основании сигналов, поступаюпцьх с датчиков к измерителя интенсивности износа, вырабатывает сигнал, пропорциональный величине возможной проходки на коронку. Этот сигнал поступает на экстремальный регулятор. С выхода, экстремального регулятора сигнал поступает на коммутатор, который поочередно с равными интервалами времени переключает цень этого сигнала с входа одного исполнительного механизма, устанавливающего значение произведения F-n, на вход второго исполнительного механизма, устанавливающего значение Таким образом осуществляется щаговой поиск оптимальных управляющих параметров в зависимости от мощности F-n управления и переменной - . Такой поиск обеспечивает любое сочетание параметров F и п из всего множества, заключенного в рабочей области этих параметров. . Однако эта система автоматически выбирает для каждой горнойпороды по максимуму проходки на коронку оптимальные управляющие параметры и, следовательно, оптимальную механическую скорость бурения и это ограничивает производительность процесса бурения в тех случаях, когда оптимальная механическая скорость бурения меньше запланированной желаемой механической скорости бурения. Целью изобретения является максимальное использование ресурса породоразрущающего инструмента в различных геологических условиях бурения при заданной механической скорости бурения. Цель достигается тем, что предлагаемая система управления процессом бурения снаб. I . жена задатчиком величины механической скорости бурения и устройством сравнения, . которое подключено к выходам датчика и задатчика механической скорости бурения «и соединено посредством переключателя с исполнительными механизмами, а вход коммутатора подключен к выходам экстремального регулятора и устройства сравнения через логический элемент ИЛИ. На фиг. 1 изображена функциональная схема описываемой системы управления процессом бурения; на фиг. 2 - кривые функционала интенсивности износа алмазной коронки. Система управления процессом бурения включает в себя привод 1 подачи, задающий нагрузку F на коронку, привод 2 вращателя, задающийскорость п вращения коронки, алмазную коронку 3, датчик 4 нагрузки F на коронку, датчик 5 скорости вращения коронки, датчик 6 механической скорости Vfteji. бурения, задатчик 7 начальных значений нагрузки на коронку и скорости ее вращения, устройства 8 и 9 суммирования сигналов управления, устройство 10 вычисления возможной проходки на коронку, экстремальной регулятор 11, исполнительнозапоминающий механизм 12, регулирующий параметры Ри п при сохранении F-n const, исполнительно-запоминающий механизм 13, регулирующий величину F-n.потенциометры 14 и Д5 отработки, коммутатор 16, задатчик 17 желаемой величины механической скорости бурения, устройство 18 сравнения сигналов, пропорциональных текущему и заданному значениям механической скорости бурения, переключатель 19 режимов бурения, логический элемент 20, выполненный по схеме ИЛИ с входами, нечувствительными к полярности запускающих сигналов. Устройство 18 сравнения подключено к выходам датчика механической скорости и Задатчика величины механической скорости, что позволяет осуществлять непрерывное сравнение выходных сигналов. Выходы экстремального регулятора 11 и устройства 18 сравнения подключены к разным полюсам переключателя 19 режимов работы, ползунок которого подключен к входу исполнительно-запоминающего механизма 13, регулирующего величину произведения Fn управляющих параметров, и к одному из входов логического элемента 20. Второй вход логического элемента 20 -подключен к выходу экстремального регулятора 11, а вход логического элемента подключен к коммутатору 16 исполнительно-запоминающих механизмов. Система управления процессом бурения допускает работу в двух режимах, соответCTBeHlio положению I и II переключателя 19. Первый режим - оптимальный режим бурения, когда переключатель 19 находится положении I. Управление приводами поГГОТТГТ Т.Г /-Trj-Vl / / TTT Т Г о ТТТ ГГ . I г Г ЛГТ1ТЛ дачи и скорости вращения коронки осуществляется сигналом с выхода экстремального регулятора 11 посредством исполнительно-запоминающих механизмов 12 и 13. Начальные значения параметров Rj и по устанавливаются задатчиком 7, причем сигнал задатчика соответствует среднему значению F-n и среднему значению переменной Регулирование управляющих параметров F и п осуществляется одновременно, причем имеется два канала управления, работающих поочередно. Исполнительный запоминающий механизм 12 первого канала управления осуществляет одновременное пропорциональное и равнонаправленное регулипование параметров Т и п при сохранении F-n const. При работе второго канала управления исполнительный запоминающий механизм 13 осуществляет одновременное пропорциональное регулирование параметров F и п. Устройство 10 вырабатывает сигнал, пропорциональный возможной величине проходки Н на коронку, причем мех. Н ) где V/мен. --- механическая скорость бурения;Л - интенсивность износа алмазной коронки;К - коэффициент пропорциональности. Этот сигнал поступает на экстремальный регулятор 11. Сигнал с выхода экстремального регулятора 11 поступает на коммутатор 16, который поочередно с равными интервалами времени переключает каналы управления. Таким образом осуществляется шаговый по.иск оптимальных управляющих параметров в зависимости от прикладываемой величины F-n и переменной -. Такой поиск обеспечивает любое сочетание параметров F и п из всего множества, заключенного в рабочей области этих параметров. Например, вначале в работу вступает исполнительный запоминающий механизм 12 регулирующий отношение , сохрацяя Р-п const, в сторону уменьщения интенсивности износа алмазной коронки в конкретной горной породе. Величина механической скорости бурения при этом практически не изменится. В этом случае происходит поиск максимума проходки Я на коронку по величине согласно формуле (1). Поиск максимального значения проходки на коронку поясняется на фиг. 2. Кривые 21 и 22 характеризуют интенсивность износа коронки в одной и той же горной породе (буримость К5 const) при различной величине РП. Кривые 22 и 23 характеризуют интенсивность износа коронки в двух горных породах с разной буримостью при F-n const Например, до включения исполнительного запоминающего механизма 12 рабочая точка, характеризующая интенсивность износа алмазной коронки, находилась в точке 24. После первого пробного шага рабочая точка перемещается в точку 25. В этот момент происходит переключение каналов управления, и в работу вступает исполнительный запоминающий механизм 13, изменяющий величину F-n. При этом изменяется как интенсивность износа коронки, так и механическая скорость бурения. Регулирование может происходить как в сторону увеличения мощности, так и в сторону уменьщения. Направление регулирования определяется интенсивностью изменения параметров VMCX и З Из формулы (I) видно, что если при уменьшении мощности будет более интенсивно уменьшаться величина tf, чем Умех, то величина Я будет увеличиваться. Регулирование в этом направлении будет происходить до тех Пор, пока сигнал, пропорциональный величине Я, не станет уменьшаться. Когда сигнал, пропорциональный проходке Я на коронку, уменьшится, направление регулирования мощности изменится. Например, при втором щаге поиска, при уменьшении значения F-n сигнал, пропорциональный величине Я, увеличится, когда рабочая точка переместится в точку 26. В точке 26 включается исполнительный запоминающий механизм 12 и выводит путем регулирования отноигения .рабочую точку в минимум 27. Сигнал на выходе экстремального регулятора I1 становится равным нулю. В этом случае запуск коммутатора 16 прекращается. Процесс регулирования закончен - найдена максимально возмож ная проходка на коронку в данной горной породе и соответствующая ей оптимальная механическая скорость бурения. При смене горной породы изменится интенсивность Т износа коронки. Например, рабочая точка, характеризующая интенсивность износа в новой горной породе, переместится на характеристику 23 в точку 28, то есть величина J уменьшится. Тогда, согласно формул (1),на выходе экстремального регулятора 1 появится сигнал и снова начнется поиск, в результате которого рабочая точка переместится в точку 29. Это будет соответствовать максимально возможной величине проходки Я на коронку в новой горной породе. При этом будет найдена новая оптимальная механическая скорость для данной горной породы. Второй режим - режим с желаемой производительностью обеспечивается введением упомянутых дополнительных признаков и соответствует положению II переключателя 19. Управление приводами подачи и вращения осуществляется поочередно: то сигналом с выхода экстремального регулятора 11 посредством исполнительно-запоминающего механизма 12, то сигналом с выхода устройства 18 сравнения посредством исполнительно-запоминающего механизма 13. Поочередное включение механизмов 12 и 13 осуществ,ляет коммутатор 16. Во входные цепи логического элемента 20 включены мостовые выпрямители, что разрещает работу логического элемента 20, а следовательно, и коммутатора 16 при управляющем сигнале любой полярности. Таким образом, при наличии хотя бы одного сигнала (любой полярности) на входах элемента 20 на е.го выходе будет электрический сигнал, запускающий в работу коммутатор 16. Последний поо-ередно разрешает работу исполнительно-запоминающим механизмам 12 и 13. (маломощные следящие приводы). В этом случае выход экстремального регулятора 11 подключается только к исполнительно-запоминающему механизму 12 с механическим выходом, осуществляющему одиовременное разнонаправленное регулирование управляющих параметров: осевой нагрузки F на коронку и скорости п ее вращения при сохранении F-n const, а выход устройства 18, сравнивающего текущее значение механической скорости бурения с заданным значением, подключается только к исполнительно-запоминающему механизму 13 с электрическим выходом, осуществляющему одновременное пропорциональное регулирование параметров Тип. Коммутатор 16, как и в известной систе: ме управления, поочередно подключает указанные исполнительно-запоминающие меха нйШы. -г Таким образом, имеются два сигнала управления, которые поочередно, с частой коммутации, управляютприводаМи механизмов осевой нагрузки на коронку и скорости её вращения. « Регулирование происходит следующим образом. --- .-; -, ..-,---.-Если заданное значение механической скорости ех-}в9.бурения больше текущего значения .T. то на выходе устройства 18 сравнения имеется положительный сигнал ощибки 4-ДУ VMex-jaj. - Уме. Этот сигнал посредством логического элемента 20 ИЛИ запускает коммутатор 16. Если в этом случае на выходе экстремального регулятора 11 также имеется сигнал, то он также запускает коммутатор 16 посредством логического элемента 20. Ес:л ивначал е включен исполнительно-запоминающий механизм 13, то в это время сигналом управления является сигнал, пропорциональньш ощибке Д V. Этот сигнал одHOBpeivicHno управляет приводом механизма подачи и приводом Бращателя, увеличивая произведение FTi до тех пор, пока сигнал ошибки не станет равным нулю. Регулирование может происходить за несколько циклов коммутации. .При смене канала управления в работу вступает исполнительно-запоминающий механизм 12, регулирующий параметры Ей п при сохранении F-n const, при1|ем управляющим сигналом является сигнал с выхода экстремального регулятора 11. При смене полярности управляющих сигналов регулирование происходит в обратНбм направлении. Таким образом, регулированием по первому каналу управления при помощи исполнительно-запоминающего механизма 13 достигается необходимое значение произведения ЕП, соответствующее заданной (желаемой) механической скорости бурения, а по второму каналу при помощи исполнительнозапоминающего механизма 12 достигается такое отнощение -, которому соответствует максимально возможная проходка на коронку в данной породе при заданном значении механической скорости бурения. Процесс регулирования и коммутации каналов управления заканчивается, когда сигналы на выходах экстремального регулятора 1.1 и устройства 18 сравнения становятся равными нулю. Система управления процессом бурения выбирает управляющие параметры: нагрузку на коронку и скорость вращения коронки, опираясь на разные критерии оценки процесса бурения: заданную механическую скорость бурения и минимально . возможный в этих условиях расход алмазов. Это позволяет бурить скважину при минимальной стоимости погонного метра. Формула изобретения Система управления процессом бурения по авт. св. № 554399, отличающаяся тем, что, с целью максимального использования ресурса породоразрущающего инструмента в различных геологических условиях бурения при заданной механической скорости бурения, она снабжена задатчиком величины механической скорости бурения и устройством сравнения, которое подключено к выходам датчика и задатчика механической скорости бурения и соединено посредством переключателя с исполнительными механизмами, а вход коммутатора подключен к выходам экстремального регулятора и устройства сравнения через логический элемент ИЛИ. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3373823, кл. 173--6, 1968.-. 2.Авторское свидетельство № 554399, кл. Е 21 В 45/00, 1973.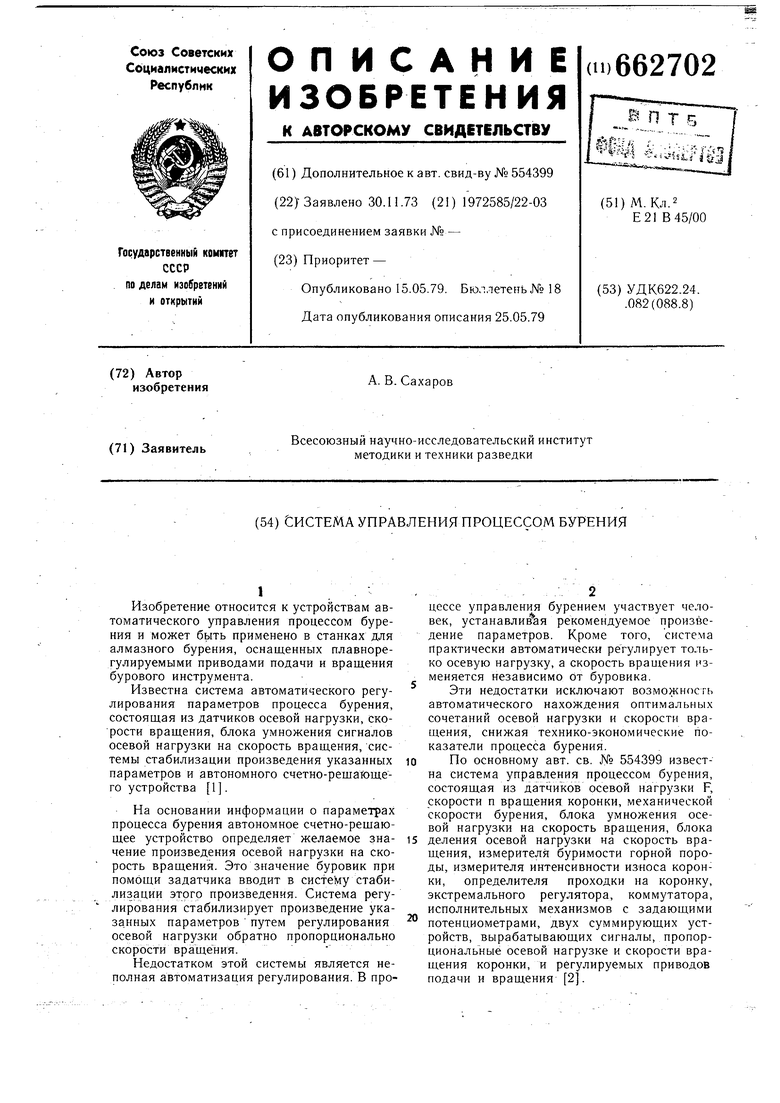
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления процессом бурения | 1973 |
|
SU554399A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ САХАРОВА А.В. | 1992 |
|
RU2021499C1 |
| Система автоматического управления процессом механического колонкового бурения | 1977 |
|
SU739219A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 1990 |
|
RU2041348C1 |
| Устройство для управления процессом бурения | 1972 |
|
SU533722A1 |
| Способ оптимизации процесса бурения | 1990 |
|
SU1795220A1 |
| Автоматическое устройство подачи долота на забой при турбинном бурении | 1951 |
|
SU110782A1 |
| Устройство управления процессом бурения | 1986 |
|
SU1418469A1 |
| Система автоматического управления процессом колонкового бурения | 1988 |
|
SU1578323A2 |
| Регулятор подачи бурового инструмента | 1983 |
|
SU1118762A1 |