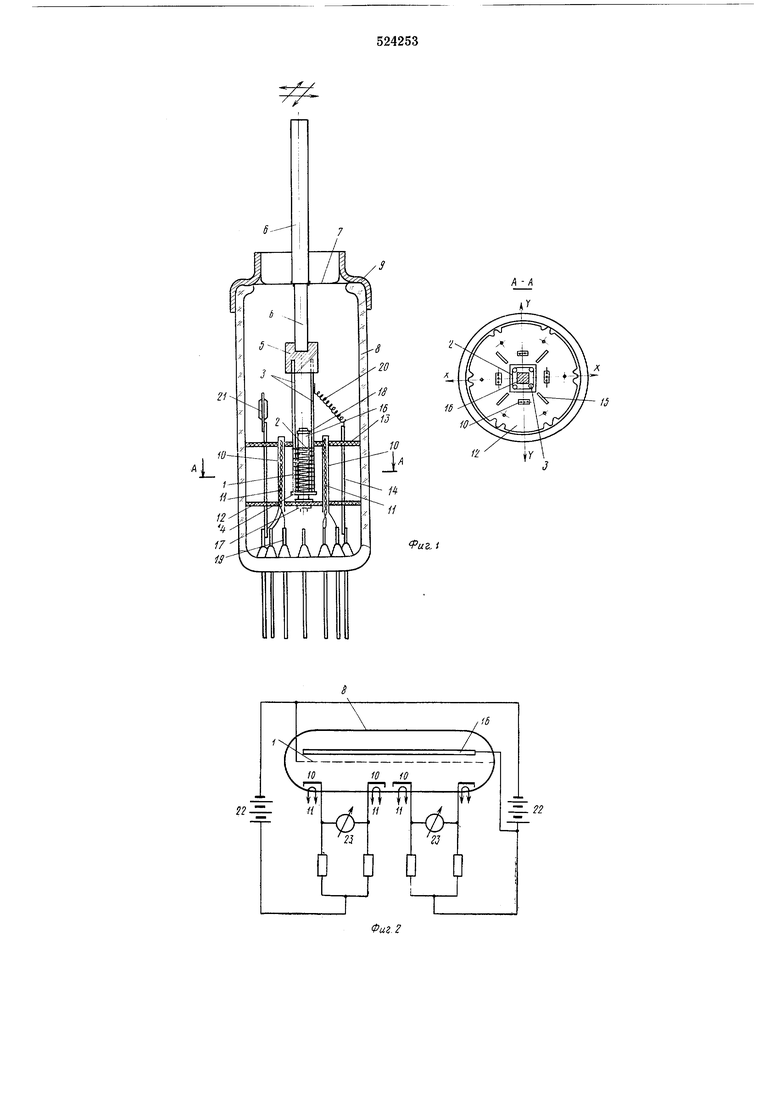
подвижного анода обеспечивается пружиной 20. Механотрон также снабжен стандартным распыляемым газопоглатителем 21.
Принципиальная электрическая схема включения механотрона (фиг. 2) состоит из двух автономных измерительных мостов, в одну из диагоналей каждого из них включен источник анодного питания 22, а в другую выходной отсчетный прибор 23.
При этом анод соединен с положительными клемами источников питания и является общим коллектором электронов, эмиттируемых четырьмя катодами. Штырь, расположенный внутри анода, присоединен к отрицательной клемме одного из источников, что обеспечивает получение тормозящего поля в промежутке анод-штырь.
Кинематическая схема механотрона, образованная подви кным анодом, мембраной и управляющим стержнем, который подвергается механическому воздействию в направлении, перпендикулярном его продольной оси, имеет две степени свободы. Конструкция механотрона позволяет производить измерения одновременно двух составляющих плоского вектора контролируемой механической величины в прямоугольной системе координат с осями X и Y (фиг. 1).
Выполнение подвижного анода с перфорированной поверхностью позволяет значительно уменьшить его массу, что обеспечивает повышение собственной частоты кинематической схемы механотрона, т. е. уменьшение его инерционности. Шаг навивки сетки целесообразно выбирать в 2-3 раза большим диаметра проволоки. При этом обеспечивается иовышение собственной частоты кинематической схемы в 1,5- 2 раза (по сравнению с трубчатыми анодом) при сохранении достаточно жесткой конструкции анода.
Металлический штырь, расположенный внутри анода, препятствует попаданию
электронов, пролетевших между витками сетки анода, с одного катода на другие, что улучшает стабильность показаний прибора. Благодаря малой инерционности двухкоордииатный механотрон найдет широкое применение для контроля быстроменяющихся векторных механических величин (например, в гидро и аэрометрии при измерении векторов скорости потоков жидкостей и газов).
Формула изобретения
Двухкоордииатный мехаиотрон продольиого управления, содержащий подвижный анод в виде прямой призмы квадратного сечения, катодный узел, состоящий из четырех плоских катодов, которые расположены против граней призмы анода, и системы экранов, отличающийся тем, что, с целью увеличения собственной частоты подвижного электрода, поверхность анода выполнена перфорированной, например, в виде сетки, а внутри анола, соосно ему, расположен штырь, электрически соединенный с катодным узлом.
i6
10
12
(

| название | год | авторы | номер документа |
|---|---|---|---|
| Силоизмерительный датчик | 1976 |
|
SU662830A1 |
| Механотронный преобразователь линейных перемещений | 1991 |
|
SU1816961A1 |
| Двухкомпонентный силоизмерительный датчик | 1979 |
|
SU1046628A1 |
| Устройство для непрерывного контроля диаметра тонкой проволоки | 1960 |
|
SU131896A1 |
| Динамометр | 1981 |
|
SU1052892A1 |
| Механотронный преобразователь | 1979 |
|
SU821967A1 |
| СВЧ-ГЕНЕРАТОР | 2006 |
|
RU2321099C2 |
| Аппарат для контактной сварки | 1974 |
|
SU519299A1 |
| Двуханодный диодный или триодный механотрон с неподвижным подогревным катодом и неподвижной сеткой | 1961 |
|
SU145936A1 |
| МЕХАНОТРОН ПОПЕРЕЧНОГО УПРАВЛЕНИЯ | 1968 |
|
SU231007A1 |