Все существэзазшие до настоящего времени системы автоматического регулирования решали задачу поддержания регулируемой велиПИкы или псстокниой, или излтеняющейся по заранее заданному закону (в случае так называемого программного регулирования).
После воздействия возмущающего фактора и отклонения вследствие этого регулируемой величины от заданного значения, вышеужазанныг системы регулирования должны устанавливать регулируемую величину на заданном уровне.
Изодромны|е регуляторы производят указанное точно; иные типы регуляторов - непосредСТЕ6ННОГО действия, с жесткой обратной связью и другие-с некоторыми отклонениями.
Между тем указанные виды регулирования лишь в ТОМ случае в тОЧнссти соответствуют своему назначению, если техническая задача, которую они должны решать, и заключается в поддержании регулируемой величины на заданном уровне.
Именно так задача регулнрОвания ставилась в первый период развития технкки, 1когда в связи с невысоким уровнем ее
достаточно
не могли BOSHFiKHyTb развития и
иные требования. Классический пример этому - рггулятор Уатта, который должен поддерживать число оборотов главного вала машины постоянным независимо от величины Нагрузки.
Однако с техники возник ряд такйх задач, с которыми существующие системы регулирования либо совершенно не могут справиться, либо справляются частично - это задачи отыскания и аоддержания эксгремальных (наиболышХ и наименьших) значений регулируемо величины.
В ;-:астсящем изобретении дается способ автоматического регулирования на максимальные нли Мннимальные значения регулнруео.юй величины.
Вследствие того что вид функциональной зависимости между регулируе.моГ ве.п чиной и регулирующей (аргументом) неизвестен и. тем бол&е, может 1зменяться с течением времени по совершенно неопределеннОМу закону, задать ее (зависимость) заранее не представляется возможным.
В связи с этим в основании принципа действия экстремального регулятора лежит следующая идея; вводится искусственное возмущение в процесс, с помощью специального устройства (ооисанного «иже) проверяется направление течения процесса и, если направление обеспечивает приближение регулируе1 1ой величины к требуемому экстремуму, возмущение допускается. Если же происходит удаление от экстремума, то знак возмущения изменяется, и после этого начинается движение в требуемом направлении вплоть до момента достижения экстремума.
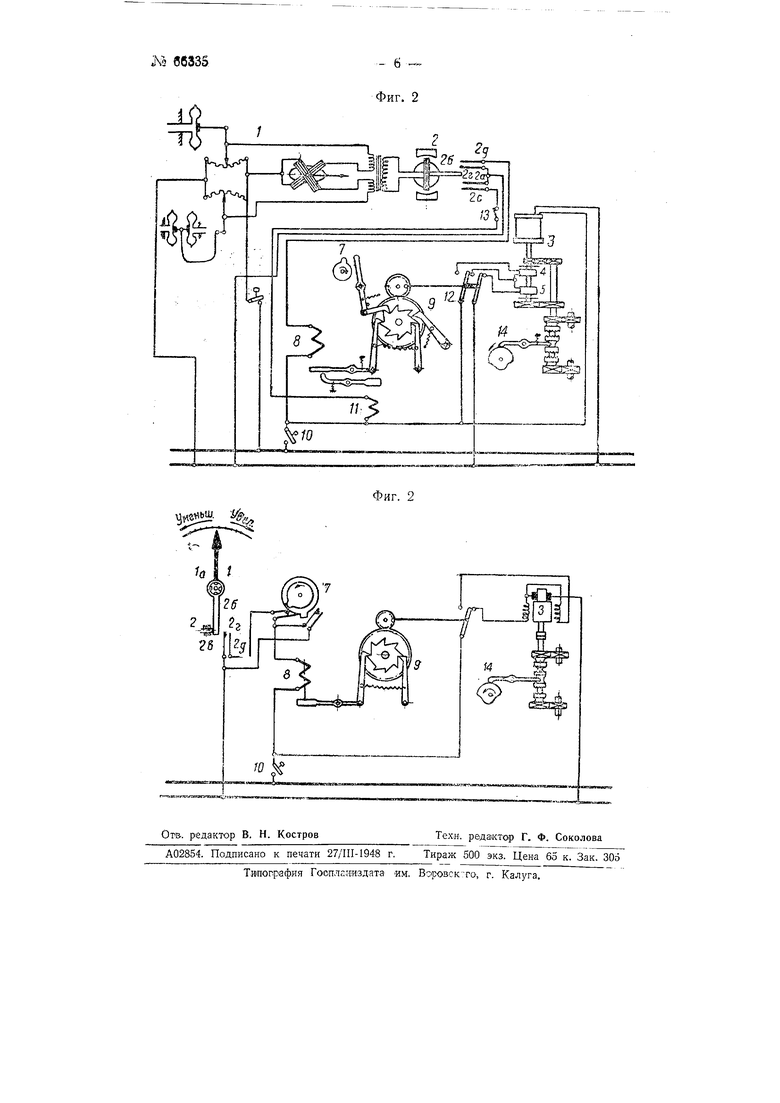
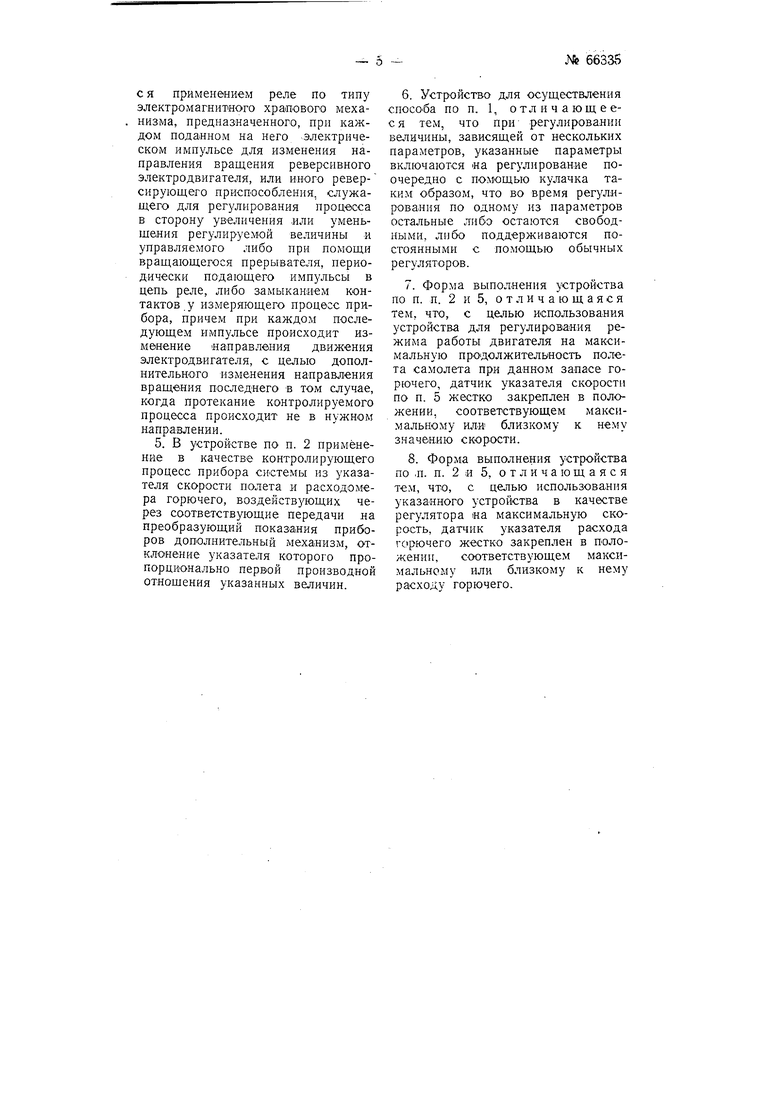
На чертеже фиг. 1 и 2 изображают два- варианта схемы экстремального регулятора.
Первый вариаит (фиг. 1) показан на примере автоматического регулятора на максимум дальности, продолжительности или скорости полета самолета.
В схему (фиг. 1) входят следующие ословные элементы: 1 - прибор, измеряющий километровый расход v KI/KXI; 2 - реле, реагирующее иа величину и знак произd/.
водной -; 3-4-5
реверсивное
устройство; 9 - шаговый механизм; 7 - коммутатор.
Искусственное возмущение, воздействующее на рукоятку газа, вызывается электромотором 3 с помощью муфт 4 н 5, включаемых неодновременно, пря перекидке рубильника 12 из одного крайнего положения в другое.
Работа регулятора происходит следующим образом. Предположим, что регулятор не включен, При этом значение . не изменяется, так как возмущение отсутствует. Включим регулятор, замкнув рубильник. При этом начинается вращение мотора и коммутатора 7. Пусть в первый момент скорость коммутатора мала и включилась муфта 4 на увеличение скорости полета. Если скорость уже была наивыгоднейшей, то ее дальнейшее увеличение вызовет увели-,dX . „
чениеЛ; при этом , . О и стрелка 26 индикатора производной (реле 2} повернется против часовой, стрелки и замкнет контакты 2г - 2д.
При этом сработает электромагнит 8, произойдет перекидка рубильника 12 и включится муфта 4 вместо муфты 5. Вследствие этого начнется уменьшение скорости и
1
уменьшение X. Так как -- при
этом отрицательна, то .стрелка 26 повернется по часовой стрелке и пройдет при этом мимо контактов 2а, 2с, не замыкая их. При дальнейшем уменьшении скорости полета, последняя пройдет через наивыгоднейшее значение. Вследствие
уменьшения ,,- стрелка 2о начнет dt
подходить (против часовой стрелки) к нулевому положению, замыкая при этом контакты 2а, 2с. Если ключ 13 выключен, то начнутся незатухающие колебания вокруг максимума, если же ключ 13 замкнут, то в момент замыкания контактов .2а, 2с работает электромагнит 11 и рубильник 12 займет среднее положение, выключив искусственное возмущение.
При работе коммутатора 7, избавляющего регулятор от действия в-ОЗмущающих сил, достигаемое значение регулируемой величины
М-ОЖеТ несколько отличаться ОТтахПосле того как наивыгоднейшая скорость найдена, рычаг 14 может включить на регулирование иной параметр.
В случае закрепления ползуна датчика указателя скорости или расходомера в положении, близком к максимальным значениям скорости или расхода, устрОЙство превращается соответственно в регулятор на максимум продолжительности или скорости полета.
В схему по фпг. 2 входят следующие основные элементы:
/ - прибор, измеряющий регулируемую величину; 2 - реле, измеряющее, направление течения прзцесса (знак скорости) сигнумреле); 5 - реверсивный мотор, вызывающий искусствениое возмущение; 7 - контактжое устройство
(коммутатор); 9 - шаговой механизм.
Сигнум-реле 2 представляет собой рычаг 26, связанный фрикцйонно с осью стрелки прибора, измеряющего регулируем то величину Р, и вследствие этого увлекаемый стрелкой 1а при изменении величины Р. Однако рычаг 2 может двигаться лишь в пределах некоторой зоны между контактами 2в и 2г. Эта зона будет называться зоной нечувствительности.
При движении стрелки прибора в ту или другую сторону рычаг 26 коснется одного из ко«тактов (2в или 2г) и остановится, между тем как стрелка будет продолжать двигаться.
Регулирование происходит следующим образом.
Предположим, что регулято-р «е включен; тогда положение стрелки 1а не будет изменяться (в предположении, что естественное возмущение отсутствует), так как параметр V, воздействующий на величину Р, не изменяется.
При этом пусть величина Р не достигает максимума.
Включим .рубильник 10. При этом начинается вращение мотора 3 (в ту или другую сторону) и диска коммутатора 7.
Пусгь при этом изменение параметра вызывает уменьшение Р.
При этом стрелка 1а прибора У. вращаясь против часовой стрелки, увлекает рычаг 26, который, пройдя часть зоны нечувствительности, замкнет контакты 2г и 2д, что вызовет вследствие срабатывания электромагнита 8 и шагового механизма 9 реверс мотора 3 и уменьшение параметра v. Вследствие этого увеличивается величина Р и, если скорость вращения диска 7 достаточно мала, величина Р достигает экстремума и начинается движение вокруг максимума.
Если зависимость между У и Р имеет вид
P ftv} и имеется .максимальное значение Р
при V VQ (т. е. /((о) Ршая
и если введены следующие обозначения:
скорость искусственного изменения у - А:,,
запаздывание прибора - А,;;, запаздывание механизмов автоматики - Д.7.
зона «ечувствительности - Р. то расчет показывает следующее: 1) колебания регулируемой величины Р вокруг максимума происходят в интервале
.-5Р,
где
о Р 8, Р -г - Г (-о) (1 ti + (Л2 т;
2)амплитуда колебаний аргумента v имеет значение
25, Я
1/Г
+ ;c(Ai«)2-f (
(fo)
3iпериод стационарных колебаний вокруг максимума
-1/F
°jZ («О
+ (A(ij2 + (A,i;)2.
Для исключения возможности расстройки работы регулятора при воздействии возмущающих сил введено контактное устройство (коммзтатор 7).
Пусть допустимое режимом работы отклонение параметра v от значения, соответствующего максимуму (Io), есть некоторое Ду; тогда число оборотов диска 7 выбирается таким образом, чтобы за период одного оборота изменение величины V от воздействия мотора 3 не превышало Ду.
ЕСли теперь при таком выборе числа оборотов комм татора 7 начинают действовать возмуша ощие силы, то возможны два случая:
а) влияние возмущения в любую сторону больше влияния .изменения V. В этом случае влияние изменения V на увеличение Р прекращается, причем г; У) + v, где и, соответствует началу возмущения;
в) влияние возмущения в любую сторОНу меньше влияния изменения t). в ЭТОМ слл-чае регу пирование протекает нор1мально до достижения значеьия v -f- Ду (при возмущении, увеличивающем Р) или О-Ду (при обраI HUM влиянии, где величина, достигаемая при отсутствии возмущающих сил.
Если скорость вращения коммутатора нельзя считать малой, то достигаемое регулятором значение может отличаться от оптимального 3 1ачения Va.
Если введены обозначения: OjP- ве./1ичина зоны нечувствительности;Д., -время на выбор люфтов в
механизмах;
Д.„ t - время выбега мотора; j,f- - суммарное время запаздывания релейных механизмов;
S3,y - суммарные ошибки прибора (из-за трений); t -период искусстзенного возмущения;/Il -скорость искусственного
изменения v,
то достигаемое значение v определится из равенства
/(.) -/-j. (Л,.н
-ЬД.,Н-2Л,)Л, Л 8,Р4-213„„.
Из последнего выражения следует, что для достижавия экстремума должно быть выполнено следующее усло)вие:
:„ fcj)
o + 2I5,,,(T;o-A (Aii-2i,,f-2A, .-2SV)
Пред, м е т и з d б р е т е н и я
i. Способ автоматического регуЛ11рюва«ия различных процессов по максимуму или по минимуму при помощи .измерительного прибора, контролирующего регулируемую величину, отличающийся тем, чго режим контролируемого процгсса периодически искусственно возмущают, например, изменяют сначала в одном, а затем в обратном направлении, с той целью, чтобы измерительный прибор допускал изменение процесса только в сторону приближения его к максимуму или минимуму, прерывая каждое изменение в обратном направлении.
2.Устройство для осуществления способа по п. 1 для автоматического регулирования режима работы двигателя внутреннего горения, в частности авиационного двигателя на достижение максимальной дальности полета при данном запасе горючего,отличающееся применением сдвоенной системы из двух электромагнитных реле, предназначенных для воздействия на общий храповой механизм таким образом, что при срабатывании первого из них происходит поочередное изменение направления враидення регулирующего процесс двигателя, а второго - полное выключение двигателя, в результате перемещения храповика в первом случае на целый зубец, а во втором на половину зубца, осуществляемые при помощи контактов измерительного прибора, отклонение указателя которого пропорционально первой производной значения регулируемой величины (удельной дальности полета) независимо от периодического изменения направления вращения двигателя специальным коммутатором, с той целью, чтобы при удалении от наивыгоднейшнх условий работы происходило дополнительно изменение направления вращения двигателя, а яри достйж-эний их - полное вык.ночение последнего.
3.Устройство для осуществления способа по п. 1 с применением измерительного прибора, контролирующего- регулируемую величину и снабженного контактами, Отлич а ю щ е ее я тем, что контактная часть прибора фрикционно связфа с указателем, не препятствуя дальнейшему отклонению последнего после соприкосновения с контакта.мн, с той целью, чтобы при изменении направления контролируемого процесса немедленно происходк.то размыкание контактов.
4.Устройство для осуществления способа по п. 1, отличающеес я применением реле по типу электромагнитного храпового механизма, предназначенного, при каждом поданном на него электрическом импульсе для изменения направления вращения реверсивного электродвигателя, или иного реверсирующего приспособления, служащего для регулирования npoueicca в сторону увеличения или уменьщения регулируемой величины и управляемого либо при помощи вращающегося прерывателя, периодически подающего импульсы в цепь реле, либо замыканием контактов, у измеряющего процесс прибора, причем при каждом последующем импульсе происходит изменение Направления движения электродвигателя, с целью дополнительного изменения направления вращения последнего в том случае, когда протекание контролируемого процесса происходит не в нужном направлении.
5. В устройстве по п. 2 применение в качестве контролирующего процесс прибора системы из указателя скорости полета и расходомера горючего, воздействующих через соответствующие передачи на преобразующий показания приборов дополнительный механизм, отклонение указателя которого пропорционально первой производной отношения указанных величин.
6.Устройство для осуществления способа по п. 1, отличающееся тем, что при регулировании величины, зависящей от нескольких параметров, указанные параметры включаются «а регулирование поочередно с помощью кулачка таким обр:азом, что во время регулирования по одному из параметров остальные либо остаются свободными, либо поддерживаются постоянными с помощью обычных регуляторов.
7.Форма выполнения устройства по п. п. 2 и 5, отличающаяся тем, что, с целью использования устройства для регулирования режима работы двигателя на максимальную продолжительность полета самолета при данном запасе горючего, датчик указателя скорости по п. 5 жестко закреплен в положении, соответствующем максимальному ИЛИ близкому к нему значению скорости.
8.Форма выполнения устройства по л. п. 2 и 5, отличающаяся тем, что, с целью использования указанного устройства в качестве регулятора на максимальную скорость, датчик указателя расхода горючего жестко закреплен в положении, соответствующем максимальному или близкому к нему расходу горючего.