Известны способы экстремального регулирования объекта с инерционностью, действующей после линейного звена, в соответствии с которым на исполнительный орган воздействует сигнал сигнум-реле. Недостатками подобных способов является сложность формирования входного сигнала экстремального регулятора и низкое качество его работы при пологих экстремальных зависимостях, а также относительно высокая инерционность объекта п-го порядка и сравнительно длительные переходные процессы.
По предлагаемому способу производят быстрое изменение входного сигнала исполнительного органа и в экстремальный регулятор вводят сигнал, представляющий часть оператора системы или производную этой части оператора, и сигнал, представляющий собой нелинейную (или линейную) функцию выходной величины и ее первых производных. Это позволяет упростить формирование входного сигнала экстремального регулятора и улучшить его работу при пологих экстремальных зависимостях, а также уменьшить величину инерционности объекта п-го цорядка и ускорить переходные процессы.
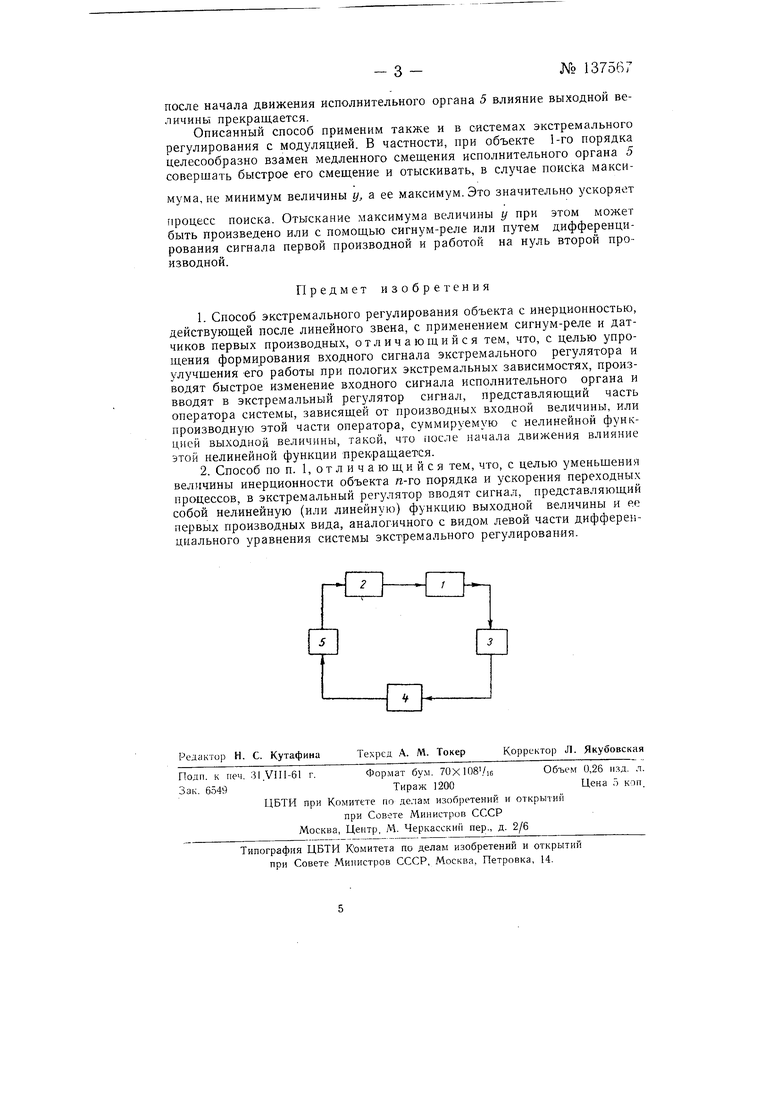
Инерционное (динамическое) звено / (см. чертеж), являющееся частью объекта, подлежащего регулированию, включается после нелинейного элемента 2. Сигнал с выхода блока 3 формирования сигнала поступает на сигнум-реле 4, которое управляется исполнительным органом 5. В случае линейного динамического звена дифференциальное уравнение, связывающее г/ и х (где х - входной сигнал, поступающий на нелинейный элемент 2, а у - сигнал на выходе объекта) имеет вид:
. . . . ) зависимость f(x)-y --х.
№ 137567- 2 Если динамическая часть объекта нелинейна, то для широкого класса систем уравнение будет иметь вид:
(у ,у,f }+ЫУ) /W,
где я)1| и г|;2 -нелинейные функции своих аргументов.
При включ едии системы экстремального регулятора входной сигнал А- начинает изменяться. Если скорость исполнительного органа 5 по величине постоянна, то x - KQ+Kt. Движение системы на каждом из этапов опишется при этом уравнениями:
а„у + . . . . + у г x(t) - в случае линейного звена; ) )(t) - в случае нелинейного звена.
Если изменение х происходит медленно, то
При этом f(x) - в случае линейного объекта,
а 2{y)f(x) - в случае нелинейного объекта.
Задача системы состоит в том, чтобы найти и поддерж.ивать величину х х . соответствующую максимальному статистическому значению:
ц.чакс f/ Л
УстI f
Но так как смещение х фактически должно происходить с достаточной скоростью, то динамическая величина у будет отличаться от уст , вследствие чего процесс происка будет продолжительным. Полученное значение «динамического максимума при этом значительно отличается от искового значения «потенциального максимума.
В соответствии с описываемым способом экстремального регулирования отыскивают не нуль первой производной, а ее максимум, который будет достигнут при , а это обеспечит и достижение Ул,аксЭто справедливо, если t/ const, что будет при условии бесконечно большой скорости перекладки. Фактически эта скорость всегда ограничена. Однако, если скорость достаточно велика, то отыскание умакс приближенно соответствует f(0-««w .
Если при достаточно быстрой перекладке исполнительного органа 5 подводить к системе величину (i(y, ....), то регулятор, отыскивая максимум величины -фь будет приближенно находить максимум искомой величины f{Kt), т. е. значение х х . В то же время низкочастотные внешние возмущения не пройдут через сигнум-реле и не будут влиять на процесс поиска.
При пологом виде характеристики производные у , т. а.
малы, так как скорость исполнительного органа 5 ограничена.
Для улучшения работы экстремального регулятора при «пологих экстремальных зависимостях объекта в экстремальный регулятор вводят сигнал, представляющий собой часть оператора системы регулирования, зависящую от производных выходной величины, суммируемую с нелинейной функцией выходной величины вида:
- ее ;- гУо фоу t (-уб ) --- const;
-Уб, фо(/)Ф(у);
(г/) Ф(У ) const, где г/ - выходная величина, а у ,; - некоторое ее значение, так что
«0.
после начала движения исполнительного органа 5 влияние выходной величины прекращается.
Описанный способ применим также и в системах экстремального регулирования с модуляцией. В частности, при объекте 1-го порядка целесообразно взамен медленного смещения исполнительного органа 5 соверщать быстрое его смещение и отыскивать, в случае поиска максимума, не минимум величины у, а ее максимум. Это значительно ускоряет
процесс поиска. Отыскание максимума величины у при этом может быть произведено или с помощью сигнум-реле или путем дифференцирования сигнала первой производной и работой на нуль второй производной.
Предмет изобретения
1.Способ экстремального регулирования объекта с инерционностью, действующей после линейного звена, с применением сигнум-реле и датчиков первых производных, отличающийся тем, что, с целью упрощения формирования входного сигнала экстремального регулятора и улучщения его работы при пологих экстремальных зависимостях, производят быстрое изменение входного сигнала исполнительного органа и вводят в экстремальный регулятор сигнал, представляющий часть оператора системы, зависящей от производных входной величины, или производную этой части оператора, суммируемую с нелинейной функцией выходной величины, такой, что юсле начала движения влияние этой нелинейной функции црекращается.
2.Способ по п. 1, отличающийся тем, что, с целью уменьщения величины инерционности объекта п-го порядка и ускорения переходных процессов, в экстремальный регулятор вводят сигнал, представляющий собой нелинейную (или линейную) функцию выходной величины и ее первыл производных вида, аналогичного с видом левой части дифференциального уравнения системы экстремального регулирования.