Изобретение относится к автоМати ческой оптимизации объектов, облада ющих инерционностью при наличии тран портнаго запаздывания. Известен способ поиска в объектах с помощью управляющего сигнала сформированного из старшей и промежуточных производных выхода объекта, при быстром релейном движении исполнительного органа Л . Недостатком этого способа являет ся значительное рыскание входного параметра и большие потери на Поиск причиной которых является то, что после реверса исполнительного органа (ИО) за нремя транспортного запаздывания происходит смещение ИО, не несущее полезной информации и вредно отражающееся на качестве регулирования. Наиболее близким к изобретению по технической сущности является способ, основанный на формировании сигнала входного шагового воздействия на объект определении и запоминании сигнала производной выходного воздействия jzj . Недостатками известного способа являются низкие качество .регулирования и быстродействие. Цель изобретения - повышение качества регулирования и быстродейст вия поиска экстремума. Поставленная цель достигается тем, что сигнал производной выходного воздействия задерживают на вре мя транспортного запаздывания объекта, формируют сигнал управляющего воздействия, ограничивают его до ну ля и в момент поступления сигнала производной выходного воздействия фбрьшруют управляющий сигнал, поляр ность которого совпадает с полярностью сигнала производной, а в слу чае равенства нулю сигнала производной сохраняют полярность управля ющего сигнала. На фиг. 1 представлена блок-схем системы, реализукщей предлагаемый способ экстремального регулирования; на фиг. 2 - графики, иллюстрирующие предлагаемый способ. Система содержит инерционный объект 1, устройство 2 формирования сигнала управления, сигнум-реле 3, исполнительный механизм 4, регулиру кщий орган 5. 1 На фиг. 2 обсзн ёны: 6 и 7 экстремальные характеристики,X - регулирующее воздействие, у - регулируемая величина, у - скорость регулируемой величины,t - время, х значение регулирующего воздействия, соответствующее максимуму у, 6j транспортное запаздывание объекта регулирования. Способ осуществляетсяследующим образом. Пусть в объекте 1-го порядка в момент t О, при X произошло смещение входа на +&х, т.е. Предположим, что в X, х интервале не бьшо смещения и других возмущений системы (дрейфа) . Поскольку имеется транспортное запаздывание t , то переходной процесс у у(Ь)-Уо при ,происходит во времени по кривой , определяемой ступенькой . В момент З J переходной процесс начинается по кривой OjAj, определяемой ступенькой 02М. Скорость у переходного чпроцесса определяется кривой 7 на фиг. 2S. На участке. а aj при О скорость постепенно убывает, в момент С наблюдается положителы« 1й скачок и затем снова убывает по кривой . . Если величина и достаточно велики, то уменьшение скорости превосходит зону нечувствительности сигнум-реле, и происходит реверс исполнительного механизма. Этот реверс является ложным, так как смещение исполнительного механизма от х х кх Х;, приближает систему к максимуму, что отражается положительным импульсом а-а, на графике скорости. Для исключения ложных импульсов при правильных смещениях исполнительного механизма необходимо сделать участок нерабочим, что достигается путем отключения сигнум-реле на участке . Отключение на время выдержки сигнум-реле ср должно начинаться в момент очередного шага и заканчиваться несколько раньше точки Оп т.е. (/ср.S . При этих условиях сигнум-реле реагирует только на положительный сигнал производной, вызванный шаговым смещением входа, Аналогичнодля исключения ложных положительных импульсов при удалеНИИ пробного шага от экстремума также необходима блокировка сигнумреле.
Если величина импульса старшей производной окажет ся меньше зоны нечувствительности сигнум-реле, что может иметь место при работе в зоне экстремума, в окрестностях точек перегиба ветвей экстремальной характеристики при незначительных шагах входа. Для не прекращения поиска целесообразно, при несрабатывании сигнум-реле ввести смещение входа в том же направлении, как и в шаге, не вызвавшем срабатывания сигнум-реле. Это смещение должно последовать после протекания времени запаздьгоания t и заданного времени подключения сигнум-реле (р.
Значит для уменьшения помех целесообразно блокировку сигнум-реле ср делать возможно более близкой к времени чистого запаздывания t j . Однако в этом случае возникает опасность потери информации, связанная с неточной оценкой времени запаздывания или возможным его изменением в процессе работы, может также сыграть свою роль и вариация параметров устройства задержки сигнум-реле. Если из-за зтих причин окажется, что ср Э момент прохождения информационного импульса сигнум-реле окажется заблокированным, и система зкстремального регулирования не отработает рабочего шага входа. .
Для уменьшения зтого неудобства оказывается полезным подача не одного смещения входа, а нескольких смещений: эти смещения будут меньшими по величине и должны укладыватся в заданное время подключения сигнум-реле. При этом первьй шаг
входа должен сопровождаться взводом сигнум-реле.
В присутствии случайных помех полезный сигнал может искажаться, что приводит к ложным смещениям входа. Влияние помех усиливается при повьш1ении порядка используемой производной, поскольку при этом дифференцировании усиливается влияние высокочастотных шумов. Для уменьшения влияния случайных помех может .быть использован принцип накопления полезного сигнала. В данном случае этот принцип может быть реализован в следующем виде: входная координата смещается на + АХ, затем после прохождения времени запаздывания и времени включения сигнум-реле ср т.е. по истечении промежутка времени 5 « производится смещение 4х; по истечении времени р производится смещение + fix и т.д. Количество смещений тем больше, чем больше уровень помех.
При смещениях + и х и - д k в течении времени tjp производится интегрирование сформированного сигнала выхода: все интегралы сформированного сигнала выхода при + д х суммируются с одним знаком, а все интегралы при - дх - противоположHbttij эти обе от поисковых шагов складываются, и по ним определяется смещение очередного рабочего шага. Поскольку помеха случайна, а сигнал регулярный, с увеличением числа смещений вероятность правильного рабочего шага возрастает.
Применение предлагаемого способа позволяет повысить быстродействие отыскания:-экстремума и уменьшить потери на рыскание.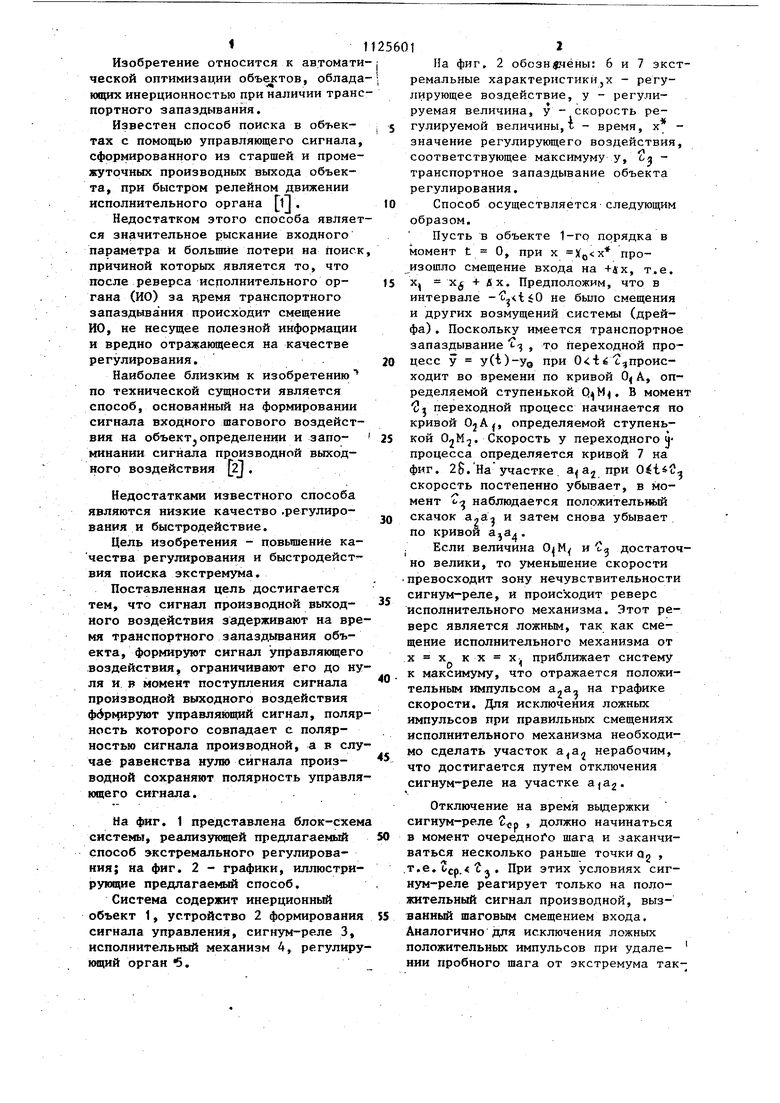

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ экстремального регулирования инерционных объектов | 1972 |
|
SU627443A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| ПРОПОРЦИОНАЛЬНЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1965 |
|
SU174249A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| Экстремальный регулятор | 1979 |
|
SU798706A1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| СПОСОБ ПОИСКА ЭКСТРЕМУМА СТАТИСТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИНЕРЦИОННОГО ОБЪЕКТА | 2011 |
|
RU2471220C1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1969 |
|
SU243011A1 |

СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАШЯ ИНЕРЦИОННЫХ ОБЬЕКТОВ С ТРАНСПОРТНЫМ ЗАПАЗдаВАЩгеМ, основанный на формировании сигнала входного шагового воздействия на объект,; определении и запоминании сигнала производной выходного воздействия, отличающийся тем, что, с целью улучшения качества регулирования и повьвоения быстродействия, сигнал производной выходного воздействия задерживают на время транспортного запаздывания объекта, формируют сигнал управляющего воздействия, ограничившот его до нуля и я момент поступления сигнала производной вы- , ходного воздействия формируют управляюв9 й сигнал, полярность которого совпадает с.полярностью сигнала производной, а в случае равенства нуJHO сигнала производной сохраняют полярность управляющего сигнала. иг. 1
Oi Itfty
8
e« t
Фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Растригин Л.А | |||
| Cиcтe eJ экстt ремального управления | |||
| М., Наука,, 1974, с | |||
| ПЕРЕНОСНОЙ КУХОННЫЙ ОЧАГ С КИПЯТИЛЬНИКОМ | 1920 |
|
SU587A1 |
