При работе экстремального регулятора с объектом регулирования, обладающим значительной инерционностью, процесс отыскания экстремума сильно затягивается. При этом неточность регулирования может возрасти: увеличится «рыскание и поддерживаемое значение регулируемой величины будет удалено от истинного значения. Точность экстремального регулирования зависит также от уровня помех. При интенсивных возмущениях процесс рету,;гиро15ания может нарушиться.
Предлагаемый способ уменьшения влияния инерцрюнности объе1ста регулирования и -ослабления воздействия монотонных возму1цений заключается в следующем.
Пусть объект регулирования является объектом //,-го порядка и к нему применяется шаговый способ регулирования. Пусть статическая зависимость регулируемой величины выхода у от входа - имеет ВицВход X дается сменлеиие. и начинается изменение выходной величины. Измерительный прибор измеряет ее в концах п+ равных промежутков времени и вводит эти /г+1 значений в счетно-решающее устройство, которое определяет то значение у, которого система достигнет через бесконечно большой промежуток времени. Затем дается новое смещение входа и описанный процесс измерения я+1 значений выхода повторяется, зукаичиваясь о(реде;1ением величины ij.,. Два последовательных значения гу,-.„ и ii + - вводятся в сигнум-реле, оп1)еделяющее необходимый знак да.1Ь гейп1;1х изменений входа
(.
№ 128214- 2 Если lia систему дейс уют внешние возмущения, скорость изменения которых можно считать приблизительно ггастоя«ной за время (я+2) ТО, лроиз(водя измерения выхода у в концах п+2 промежутков времени, можно учесть также влияние внешних возмущений и правильно определить необходимый знак изменения входа. При наличии измерителей первых производных число необходимых выдержек убывает.
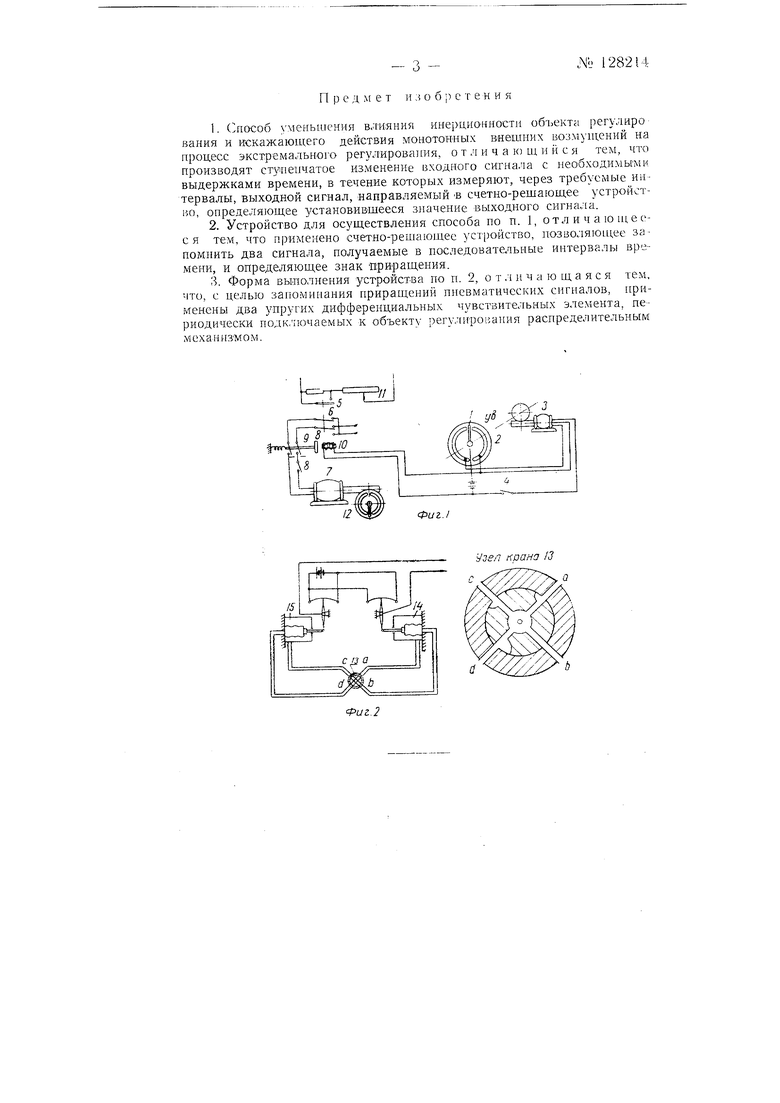
На фит. 1 приведена схема устройства, действующего но описываемому способу, для малоииерционного объекта; на фиг. 2-пневматическое устройство для запоминания.
Щетка / (фиг. 1) периодически связывается с измерительным устройством и измеряет приращение выхода у или приращение его интеграла по времени. Ламельный диск 2 связан с .мотором 3 отработки запоминания, включаемым 4.
Уставка регулятора включается илн выключается рубильником ,5, кинематически связанным с рубильником 6. Направление вращения интегрирующего двигателя 7, включаемого рубильником 8, зависит от положения рубильников 6 и 9, включенных носледовательно, причем положение рубильника 9 определяется якорем электромагнита 10, Бклрочаемого, когда щетка 1 находится на ламели уЬ. Смещение входа 11 производится при отработке щетки 12. Необходимый порядок включения отдельных элементов схе.мы определяется при помощи кулачкового устройства.
Рассмотрим действие системы. Нусть в начальный момент включается уставка регулятора. Начинается изменение регулируемой величины-выхода у. Это изменение происходит в течеиие времени j, причем щ,етка 1, связанная муфтой с измерительным приборо.л, будет изменять свое положение. Но истечении TJ, производится включение ключа 4, и начинается отра бстка запоминания поворотом диска 2 (до попадания щетки 1 в междуламельное нространство). В течение времени отработки щетка / или остается связанной с измерительным прибором, или иенодвижной. Затем происходит сбрасывание щетки 1 в начальное положение. Далее дается выдержка времени, в течение которой щетка 1 занимает новое положение. Затем замыкают ключи 4 и 8 и производят отработку запоминания и отработку интегрирующего двигателя 7, с.мещдющего уставку входа. Направление вращения мотора 7 зависит от положения рубнльнико з 6 и 9. Если в результате двух циклов произойдет уменьщение выхода у, то щетка / окажется на ламели уЬ, и нроизойдет смещение рубильника 9 вправо, что вызовет изменение ианравления вращения двигателя 7. Носле отработки двигателя 7 производится сброс щетки / в пачальное положение, и цикл повторяется.
Нневматическое устройство запоминания, показанное на фиг. 2, работает следующим образо.м.
Давление, экстремум которого разыскивается, подводится через четырехходовой кран 13 к четырем полостям двух диффереициальиых датчиков 14 и 15. Пос; едние включены в дифференциальную схему измерения.
Клапан крана 13 вращается от мотора с постоянной скоростью, и при этом выполняется следующий цикл операций: 1) открываются четыре полости, 2) закрывается трубопровод b и входу к дается смещение А, 3) дается выдержка времени, и после нее закрываются трубопроводы а и с, 4) производится выдержка времени, а затем закрывается трубопровод d, 5) сравниваются значения, измеренные датчиками, и производится смещение входа х в нужнуро сторону. На этом цикл заканчивается, а затем снова повторяется в такой же последовательности.