(54) УСТРОЙСТВО ДЛЯ ПОДВОДА ЭНЕРГИИ ОТ НЕПОДВИЖНОГО ОБЪЕКТА К ПОДВИЖНОМУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подвода энергии от неподвижного объекта к подвижному | 1980 |
|
SU904061A1 |
| Устройство для сварки с отсосом газовОТ пЕРЕМЕщАющЕгОСя РАбОчЕгО ОРгАНА | 1979 |
|
SU848225A1 |
| Токоподвод к подвижному токоприемнику | 1977 |
|
SU650146A1 |
| Устройство для подвода энергии к подвижному объекту | 1987 |
|
SU1494093A1 |
| Устройство для гибкого токоподвода к передвижным электроприемникам | 1978 |
|
SU790056A1 |
| Устройство для гибкого токоподвода к подвижному электроприемнику | 1985 |
|
SU1436167A1 |
| Устройство для подвода энергии к подвижному приемнику | 1980 |
|
SU920932A1 |
| Кабельно-троллейный токоподвод транспортных подвижных средств | 1989 |
|
SU1758746A1 |
| Устройство для кабельного токоподвода к подвижному объекту | 1988 |
|
SU1562170A1 |
| Устройство для подвода энергии с неподвижной части объекта на поворотную | 1983 |
|
SU1115154A1 |
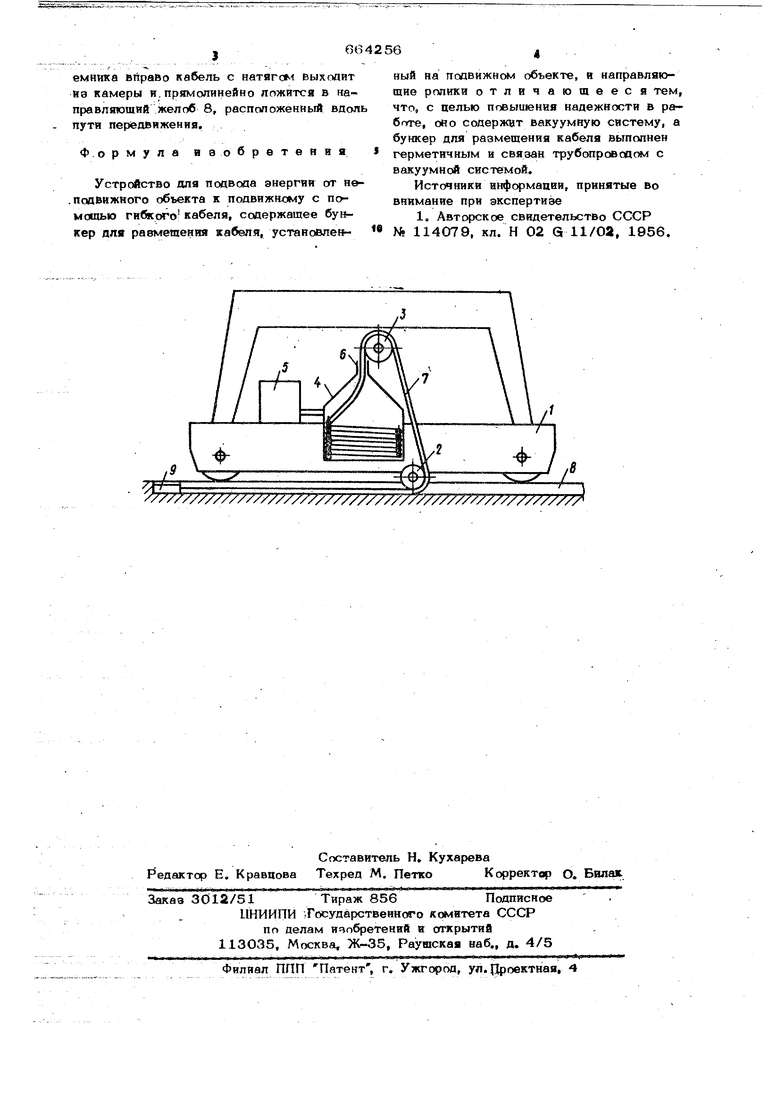
Изобретение относится к устройствам для подвода энергии от неподвижного обьекта к подвижисму с помощью гибкого кабеля и может быть использовано в электрсугехкической промь Шпенности. Известно устройство для свободной укладки и выдачи гибкого пита ощег6 кабе-ля на 1самохгш;ныз ;1 электрофицированных машинах ссщержашее бункер для размещения кабеля, направляющие реттики l . Однако такое устройство ненадежно в работе. Целью изобретения является повышение надежнбстйг устройства в работе, Это достигается тем, что предложенно устрсАство содержит вакуумную систему, а бункер для размещения кабеля выполне Герметичным и свяван трубопроводом с вакуумной системой. На чертеже схематически изображено предложенное устройство, общий вид. Устройство содержит перемещающийся токоприемник 1, закрепленные на нем шправляюшие холостые ролики 2 и 3, сборник кабеля 4, выпопненньй в виде герметичней камеры, .соединенной трубопроводом с вакуумной системой 5. Камера снабжена отверстием 6 для приема электрического кабеля 7. С внешней стороны кабель через направляющий желоб 8 и вводное устройство 9, которые распо-ложены в Полу, соединен со стационарным источником питания. ТокопСдвся работает следующим образом. При включении вакуумной системы 5 в камере 4 создаетсй разряжение, в р&зультате чего на кабель 7 действует определенное усилие, направленное во внутрь Камеры, Величина и знак этого усилия во время работы токоподвода остаются неизменными и йе зависят от того, в каkyro сторону движется токоприемник. При движении токоприемника, например, влево кабель под действием усилия, создаваемого разряжением, втягивается в камеру 4 и автоматически сворачивается там в кольца. При движении токоприемника вйраво кабель с натягом выходит из камеры н. прямолинейно ложится в направляюший желоб 8, расположенный вдол пути передвяжения. Ф.ормула ив обретения Устройство для подвода энергии от нв . подвижного объекта к подвижному с помошью гибкого кабеля, содержащее бункер для равмещения кабеля, установлеи / /7/ // /7777777777/7/777/////77 / /////////ный на подвижнсяи объекте, и направляющие ролики отличающееся тем, что, с целью повышения надежности в рабпте, оно содержит вакуумную систему, а бункер для размещения кабеля выполнен герметичным н связан трубопроводом с вакуумной системой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 114079. кл. Н 02 G 11/02, 1956.
