рых соединены с пуско-регулирующей аппаратурой.
На чертеже представлено предлагаемое устройство.
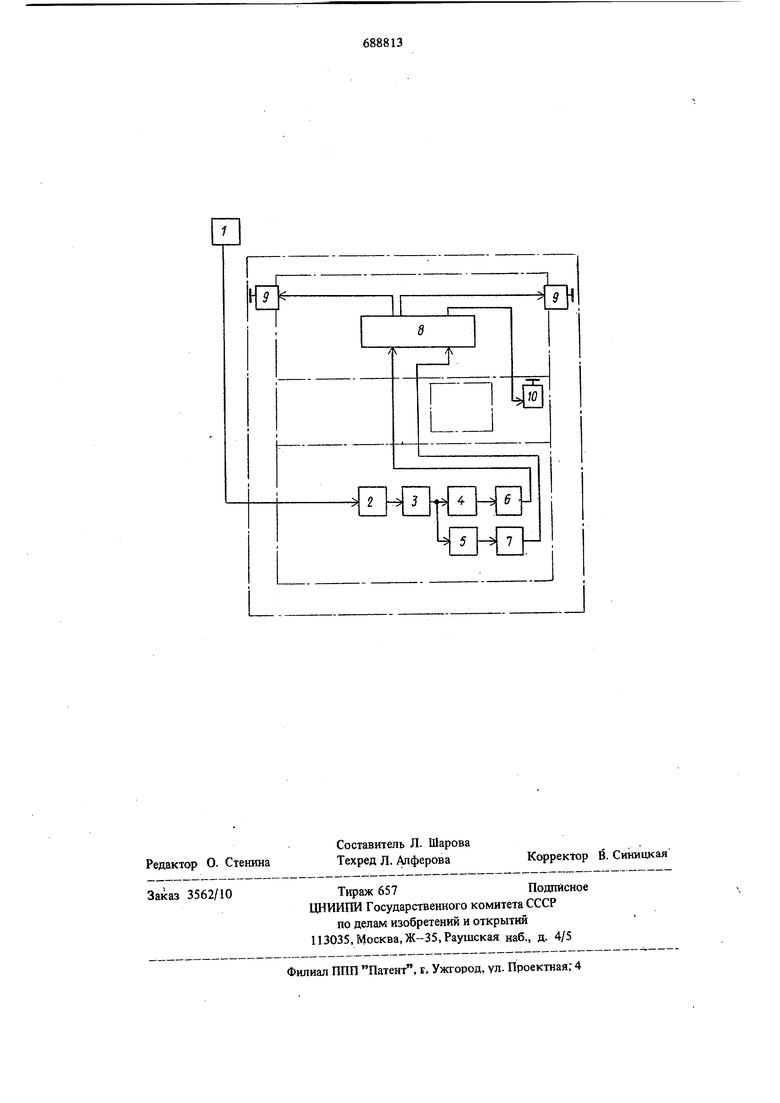
Устройство автоматического управления бетоноукладчиком содержит индуктивный датчик 1, счетчик импульсов 2, соединенный с выходом датчика, дешифратор 3, соединенный с выходом счетчика импульсов, программоносители 4 и 5, соединенные с выходом дешифратора 3, дешифраторы 6 и 7, подключенные к соответствующим программоносителям 4 и 5, систему следящего привода 8, подключенную к дешифраторам 6 и 7, двигатель 9 хода бетоноукладчика и двигатель 10 хода бункера.
На форме в точках изменения направления укладки бетона (узловых точках) установлены металлические пластины (на чертеже не показаны), предназначенные для возбуждения индуктивного датчика. Пунктирными линиями на чартеже изображена рама бетоноукладчика и несущая рама .
Перед началом работы бетоноукладчика программа набирается на программоносителях 4 и 5.
В процессе работы бетоноукладчика индуктивный датчик 1- (датчик курса), проходя через узловые точки, расположеннь.1е по конфигурации формы изготовляемого Изделия, подает от этих точек импульсы на счетчик импульсов 2.
В зависимости от числа поданных импульсов на выходе счетчика возникает определенная комбинация сигналов, подаваемых на первый дешифратор 3. Счетчик 2 считывает количество проходящих
узловых точек в двойном коде. Дешифратор 3, который предназначен для подачи напряжения на определенную шину программоносителя, расшифровывает комбинации двойного кода и подает напряжение на одну из горизонтальных шин программоносителей 4 и 5, соответствующую числу пройденных узловых точек.
Появление напряжения на шине про1раммоносителя реализует набранную программу в виде определенной комбинаш{и сигналов.
Тумблеры программоносителя соединяют в соответствии с программой, определенную горизонтальную шину с требуемыми вертикальными пшнами, от которых комбинация сигналов по, дается на вход дешифратора 6 или 7.
Дешифраторы 6 и 7 расшифровывают зти комбинации и подают напряжение на соответствующие обмотки трансформаторов в пускорегулирующей аппаратуре 8, которая изменяет напряжение двигателя 9 хода бетоноукладчика и двигателя 10 хода бункера,- Эти электродвигатели изменяют скорость вращения и перемещают бункер по требуемой траектории. В результате при укладке бетона бункер совершает сложное движение.
Формула изобретения
Устройство для автоматического управления бетоноукладчиком, содержащее пуско-регулируюшую аппаратуру двигателей привода бетоноукладчика и двигателя хода бункера, блок управления и датчик курса, отличаюше.е с я тем, что, с целью повышения производительности работы бетоноукладчика, блок управления вьшолпен из счетчика, трех дешифраторов и двух программоносителей, причем датчик курса подключен через счетчик ко входу первого дешифратора, выход которого соединен со входами двух программоносителей,, выходы которых подключены ко второму и третьму дешифраторам, выходы которых соединены с пуско-регулируюшей аппаратурой.
Источники информации, принятые во внимание при экспертизе
1.Промышленность сборного железобетона . Реферативная информация. ВНИИЭСМ, М., 1976, № 12, с. 6.
2.Авторское свидетельство СССР № 370063, кл. G 05 D 13/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСЕСОЮЗНАЯ I n^rr[irHij-i[x^f^^:F-Kd | 1973 |
|
SU370063A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1971 |
|
SU319382A1 |
| Обучающее устройство | 1980 |
|
SU875434A1 |
| Временное задающее устройство | 1983 |
|
SU1156003A1 |
| Устройство управления тепловой обработкой бетона | 1985 |
|
SU1312525A1 |
| Устройство для контроля блоков постоянной памяти | 1983 |
|
SU1125657A1 |
| Устройство для управления ленточным перфоратором | 1982 |
|
SU1049934A1 |
| Программируемый генератор импульсов | 1985 |
|
SU1575295A1 |
| Устройство для контроля и регистрацииРЕжиМОВ РАбОТы дВигАТЕля | 1979 |
|
SU824244A1 |
L..
J
