ел
г
IsD
00
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического числового управления координатными перемещениями, в частности для установок присоединения проволочных выводов с автоматическим вводом коррекции о положении полупроводникового кристалла интегральной микросхемы (ИМС).
Цель изобретения - увеличение точности позиционирования устройства.
На фиг. 1 приведена функциональная схема устройства программного управления процессом сборки интегральных микросхем; на фиг. 2 - функциональная схема датчика центра контактной площадки; на фиг. 3 - эпюры электрических сигналов на выходе датчика центра контактной площадки кристалла ИМС.
Устройство программного управления процессом сборки интегральных микросхем содержит (фиг. 1) две координаты 1 и 2, блок 3 задания команд и в каждой координате реверсивный счетчик 4 импульсов, блок 5 программ, блок 6 сравнения, соединенный входом через блок 5 программ с первым выходом блока 3 задания команд, первый вход реверсивного счетчика 4 импульсов соединен с вторым выходом блока задания команд,два мультиплексора 7 и 8, выходы которых подключены к входам блока 9 шагового привода данной координаты, первые входы первого и второго .мультиплексоров соединены с первыми выходами датчика 10 центра контактной площадки, второй вход мультиплексора 7 соединен с выходом блока б сравнения, а второй вход мультиплексора 8 - с вторым выходом блока 3 задания команд,, выход блока шагового привода 9 данной координаты подключен к второму входу реверсивного счетчика 4 импульсов,датчика 10 центра контактной площадки с выходами 1 и 12. Датчик 10 центра контактной площадки (фиг. 2) содержит две координаты 13 и 14 фотоприемники 15 и 16, каждая координата состоит из последовательно соединенных дифференциального усилителя 17, детектора 18, компаратора 19, выход которого соединен с щиной 11, компаратора 20, вход которого подключен к выходу дифференциального усилителя 17, а выход - к щине 12, фотоприемники 15, выходы которых подключены к первому и второму входам дифференциального усилителя 17, координаты 14, фотоприемники 16, выходы которых подключены к первому и второму входам дифференциального усилителя 17 координаты 13. На фиг. 2 изображен кристалл 21 интегральной схемы, контактная площадка 22 и сварочная головка 23.
Фотоприемники 15 и 16 расположены ортогонально (фиг. 2), выходы подключены на входы схемы анализатора центра контактной площадки 22 кристалла 21 интегральной схемы. В плоскость чувствительной зоны фотоприемников проецируется изображение контактной площадки. Если изображение контактной площадки равномерно проецируется на все четыре фотоприемника, значит центр контактной площадки расположен точно под сварочным инструментом 23 (фиг. 2).
Устройство программного управления
0 процессом сборки ИМС работает следующим образом.
Оператор, наблюдая в микроскоп, производит позиционирование, т.е. совмещение инструмента 23 сварочной головки (фиг. 2)
j с центром первой контактной площадки 22 полупроводникового кристалла 21 интегральной микросхемы. Если позиционирование произведено неточно, устройство автоматически корректирует положение сварочного инструмента относительно центра контактной площадки и только после этого производит сварочное соединение. С выхода блока 3 задания команд (фиг. 1) на вход блока 5 программ поступает команда «Выбор адреса. С выхода блока 5 программ на
5 вход блока 6 сравнения поступает значение координаты следующей контактной площадки кристалла. На выходе блока 6 сравнения появляется логический сигнал высокого уровня, соответствующий команде «Старт, который проходит через компаратор 7 на первый вход блока щагового привода 9. Одновременно с выхода блока 3 задания команд через компаратор 8 на вход блока 9 щагового привод-а поступает логический сигнал «Направление. Блок 9 щагового привода производит совмещение
инструмента и следующей контактной площадки кристалла. В это время на вход счетчика 4 поступают импульсы тактового генератора блока 9 щагового привода. Как только значение текущей и адресной координаQ ты на входе блока 6 сравнения станут равными между собой, на выходе блока 6 сравнения появится логический сигнал низкого уровня. На этом процесс грубого совмещения контактной площадки и инструмента заканчивается. Инструмент выведен в предполагаемую зону контактной площадки кристалла ИМС. В этот момент управление блоком 9 щагового привода передается датчику центра контактной площадки 10. После совмещения инструмента с предлагаемой зоной контактной площадки сигналы управления блоком 9 щагового привода (фиг. 1) поступают от датчика центра контактной площадки 10 по щинам 11 и 12.
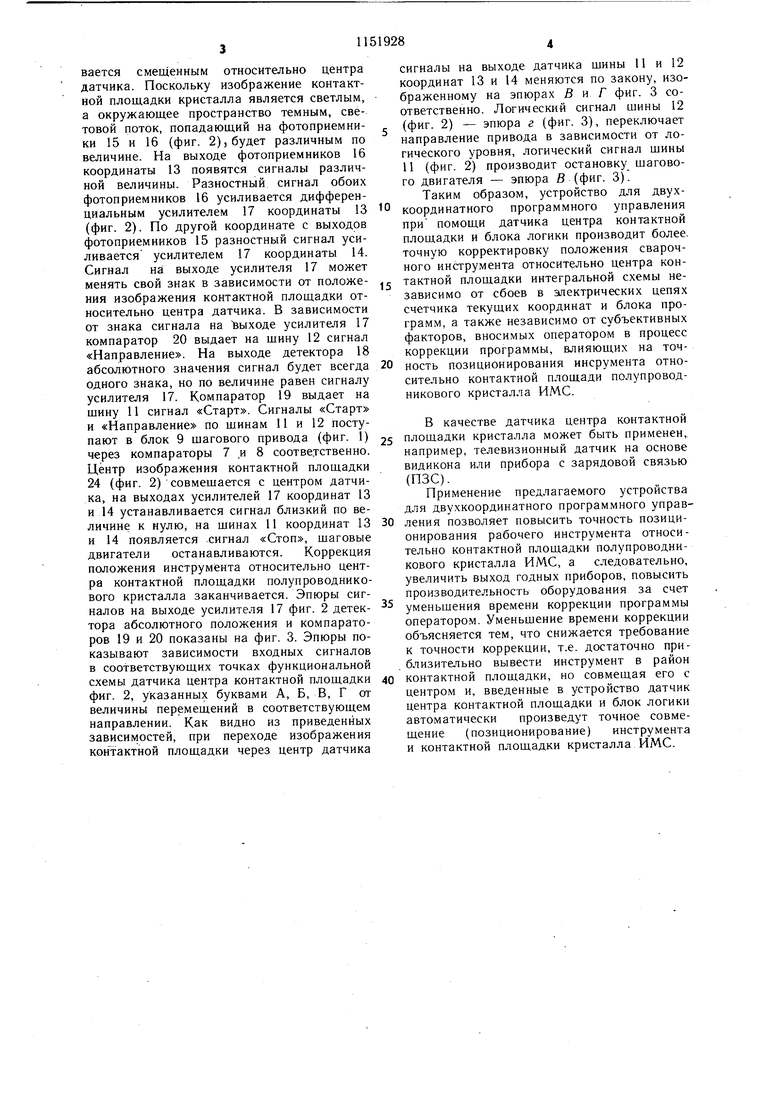
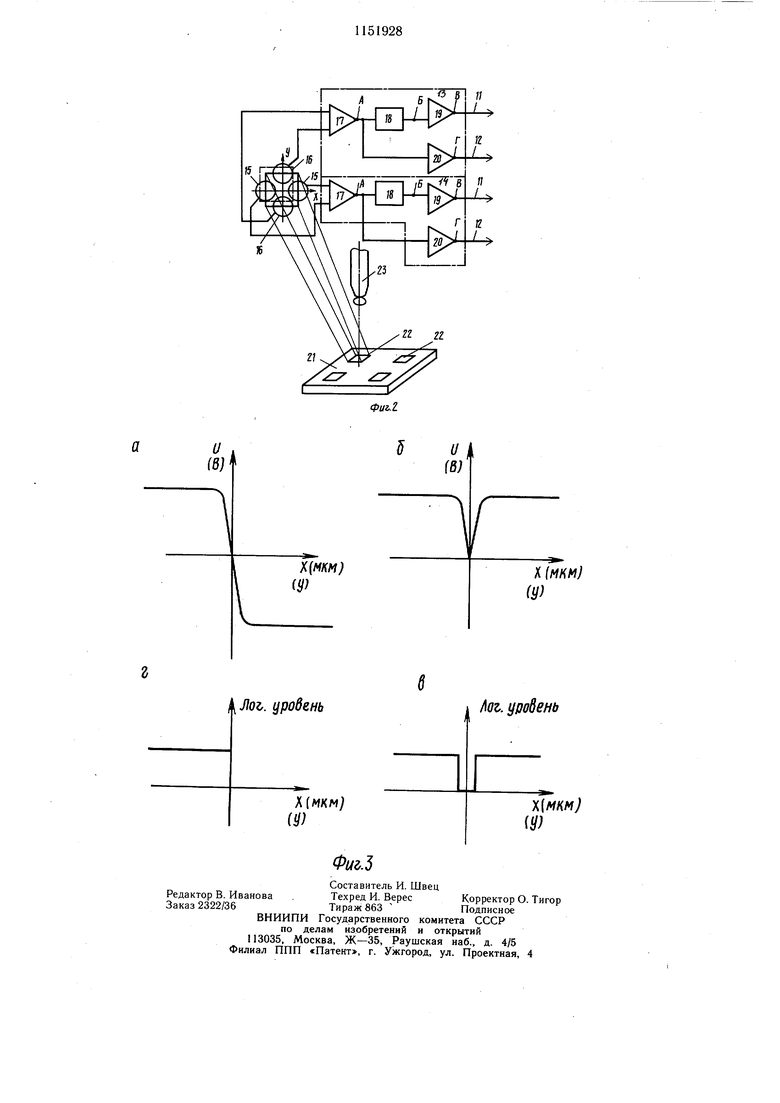
Предположим, что в момент совмещения инструмента с-предполагаемой зоной контактной площадки изображение контактной площадки проецируется на фотоприемники (показано на фиг. 2 пунктирной линией). Изображение контактной площадки оказывается смещенным относительно центра датчика. Поскольку изображение контактной площадки кристалла является светлым, а окружающее пространство темным, световой поток, попадающий на фотоприемники 15 и 16 (фиг. 2), будет различным по величине. На выходе фотоприемников 16 координаты 13 появятся сигналы различной величины. Разностный сигнал обоих фотоприемников 16 усиливается дифференциальным усилителем 17 координаты 13 (фиг. 2). По другой координате с выходов фотоприемников 15 разностный сигнал усиливается усилителем 17 координаты 14. Сигнал на выходе усилителя 17 может менять свой знак в зависимости от положения изображения контактной площадки относительно центра датчика. В зависимости от знака сигнала на выходе усилителя 17 компаратор 20 выдает на шину 12 сигнал «Направление. На выходе детектора 18 абсолютного значения сигнал будет всегда одного знака, но по величине равен сигналу усилителя 17. Компаратор 19 выдает на щину 11 сигнал «Старт. Сигналы «Старт и «Направление по шинам 11 и 12 поступают в блок 9 шагового привода (фиг. 1) через компараторы 7 и 8 соответственно. Центр изображения контактной площадки 24 (фиг. 2) совмешается с центром датчика, на выходах усилителей 17 координат 13 и 14 устанавливается сигнал близкий по величине к нулЮ; на щинах И координат 13 и 14 появляется сигнал «Стоп, шаговые двигатели останавливаются. Коррекция положения инструмента относительно центра контактной площадки полупроводникового кристалла заканчивается. Эпюры сигналов на выходе усилителя 17 фиг. 2 детектора абсолютного положения и компараторов 19 и 20 показаны на фиг. 3. Эпюры показывают зависимости входных сигналов в соответствующих точках функциональной схемы датчика центра контактной площадки фиг. 2, указанных буквами А, Б, В, Г от величины перемещений в соответствующем направлении. Как видно из приведенных зависимостей, при переходе изображения контактной площадки через центр датчика
сигналы на выходе датчика шины 11 и 12 координат 13 и 14 меняются по закону, изображенному на эпюрах S и Г фиг. 3 соответственно. Логический сигнал шины 12 (фиг. 2) эпюра г (фиг. 3), переключает направление привода в зависимости от логического уровня, логический сигнал шины 11 (фиг. 2) производит остановку шагового двигателя - эпюра В (фиг. 3).
Таким образом, устройство для двухкоординатного программного управления при помощи датчика центра контактной площадки и блока логики производит болееточную корректировку положения сварочного инструмента относительно центра контактной площадки интегральной схемы независимо от сбоев в электрических цепях счетчика текущих координат и блока программ, а также независимо от субъективных факторов, вносимых оператором в процесс коррекции программы, влияющих на точность позиционирования инсрумента относительно контактной площади полупроводникового кристалла ИМС.
В качестве датчика центра контактной площадки кристалла может быть применен, например, телевизионный датчик на основе видикона или прибора с зарядовой связью (ПЗС).
Применение предлагаемого устройства для двухкоординатного программного управления позволяет повысить точность позиционирования рабочего инструмента относительно контактной площадки полупроводникового кристалла ИМС, а следовательно, увеличить выход годных приборов, повысить производительность оборудования за счет уменьшения времени коррекции программы оператором. Уменьшение времени коррекции объясняется тем, что снижается требование к точности коррекции, т.е. достаточно приблизительно вывести инструмент в район контактной площадки, но совмещая его с центром и, введенные в устройство датчик центра контактной площадки и блок логики автоматически произведут точное совмещение (позиционирование) инструмента и контактной площадки кристалла ИМС.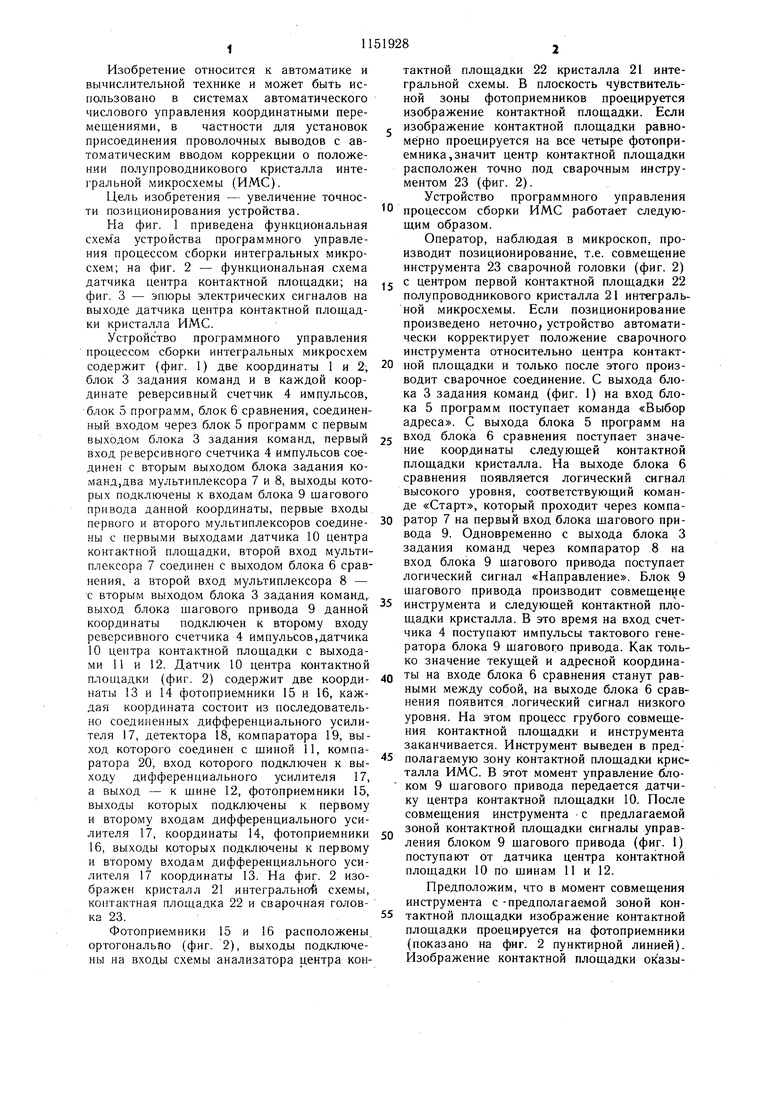
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО ПОЗИЦИОНИРОВАНИЯ | 1986 |
|
SU1389498A1 |
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| Устройство для сварки давлением | 1983 |
|
SU1184630A1 |
| Установка для присоединения проволочных выводов | 1991 |
|
SU1773643A1 |
| КРЕМНИЕВЫЙ МУЛЬТИПЛЕКСОР | 2015 |
|
RU2602373C1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| СПОСОБ КОСВЕННОГО ИЗМЕРЕНИЯ АРТЕРИАЛЬНОГО ДАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2123277C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНДУКЦИИ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ | 1995 |
|
RU2108593C1 |
1. УСТРОЙСТВО ДЛЯ ПРОТРАММНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СБОРКИ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ, содержащее блок задания команд и в каждой координате реверсивный счетчик импульсов, выход которого подключен к первому входу блока сравнения, соединенного вторым входом через блок программ с первым выходом блрка задания команд, первый вход реверсивного счетчика импульсов соединен с вторым выходом блока задания команд, отличающееся тем, что, с целью увеличения точности позиционирования устройства, в него введены датчик центра контактной площадки и в каждую координату - два мультиплексора, выходы которых подключены к входам блока щагового привода данной координаты, первые входы первого и второго мультиплексоров соединены с первыми выходами датчика центра контактной площадки, второй вход первого мультиплексора соединен с выходом блока сравнения, а второй вход второго мультиплексора - с вторым выходом блока задания команд, выход блока шагового привода данной координаты подключен к второму входу реверсивного счетчика импульсов. 2. Устройство по п. 1, отличающееся, тем, что датчик центра контактной площадI ки содержит первый компаратор и последовательно соединенные дифференцирую(О щий усилитель, детектор и второй компаратор, выход которого соединен с первым выходом датчика центра контактной площадки, второй выход которого подключен к выходу первого компаратора.
X (м/(м;
(Я
Мг,. уровень
. уровень
| Двухкоординатное устройство дляпРОгРАММНОгО упРАВлЕНия | 1977 |
|
SU807218A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881673A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
