При передаче мощности переменным током встречается ряд трудностей, связанных главным образом с требованиями устойчивой параллельной работы электрических станций, что, в свою очередь, ставит задачу нейтрализации действия части индуктивного сопротивле.ния электрической цени. Чтобы уничтожить влияние индуктивного соцротивления линии электропередачи, можно ввести последовательно в цепь некоторую дополнительную э.д.с. так, чтобы последняя комленсировала э.д.с.самоиндукции. В этом заключается идея сериесной компенсации индуктивности.
В работах .по сериесной компенсации указывается на то, что синкронная Машина для устойчивой работы ее в качестве сериесного синхронного компенсатора в режиме компенсации индуктивности должна снабжаться мощным стабилизирующим синхронным двигателем, а для регулирования фазы э.д.с. компенсации лри изменении фазы тока, текущего по лкнии, она должна иметь поворотный статор. Далее делается вывод о практической непригодности синхронной мащины для целей сериесной компенсации.
В основном авт. св. № 66581 был описан сериеоный синхронный компенсатор, выполненный с неподвижным (неповоротным) статором, для чего ротор компенсатора снабжался двумя обмотками возбуждения, расположенными под углом друг к другу и питаемыми токами, соотнощение между которыми неавтоматически или автоматически изменяется для поворота оси суммарного магнитного потока относительно осей обмоток.
Предметом настоящего изобретения является усоверщенствованная модификация компенсатора по указанному авторскому свидетельству, в которой номинальная мощность стабилизирующего двигателя может
№г67146-- 2 -
быть сделана меньшей, чем мощность компенсатора. Эта цель достигается тем, что обмотки возбуждения компенсатора получают ток возбуждения от преобразователя частоты, сидящего на. общем с комленсатором валу и возбуждаемого от ce,p/iecHoro трансформатора в цепи статора комленсатора.
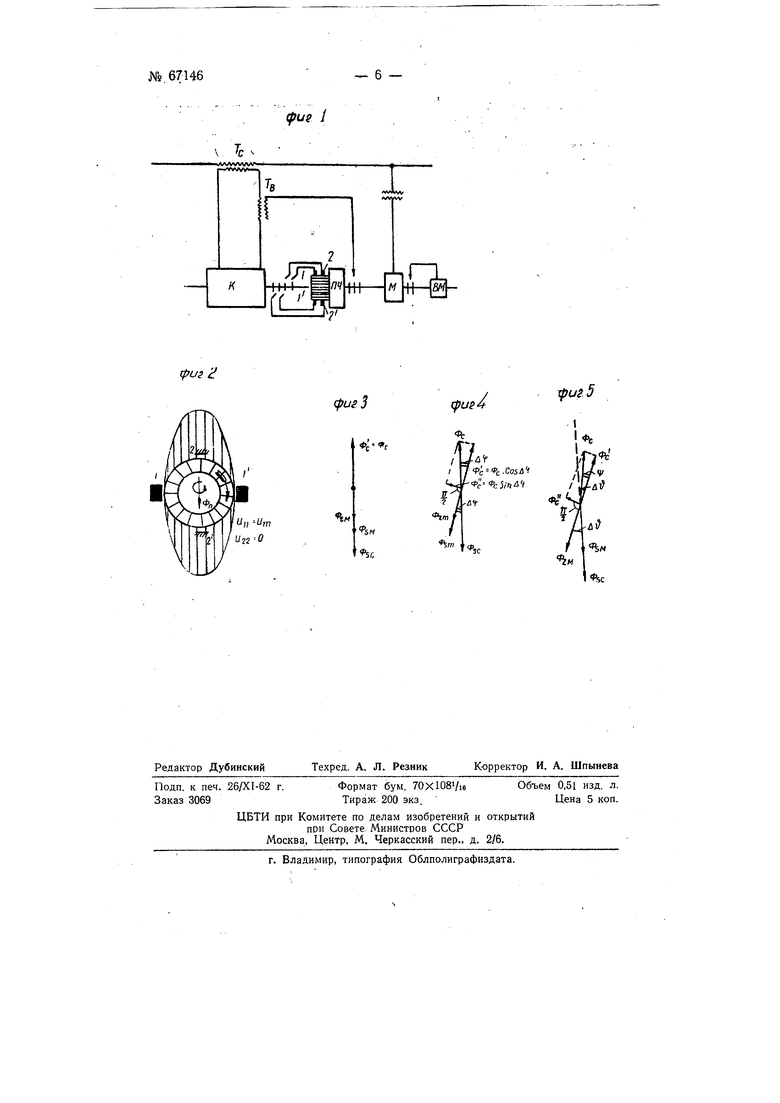
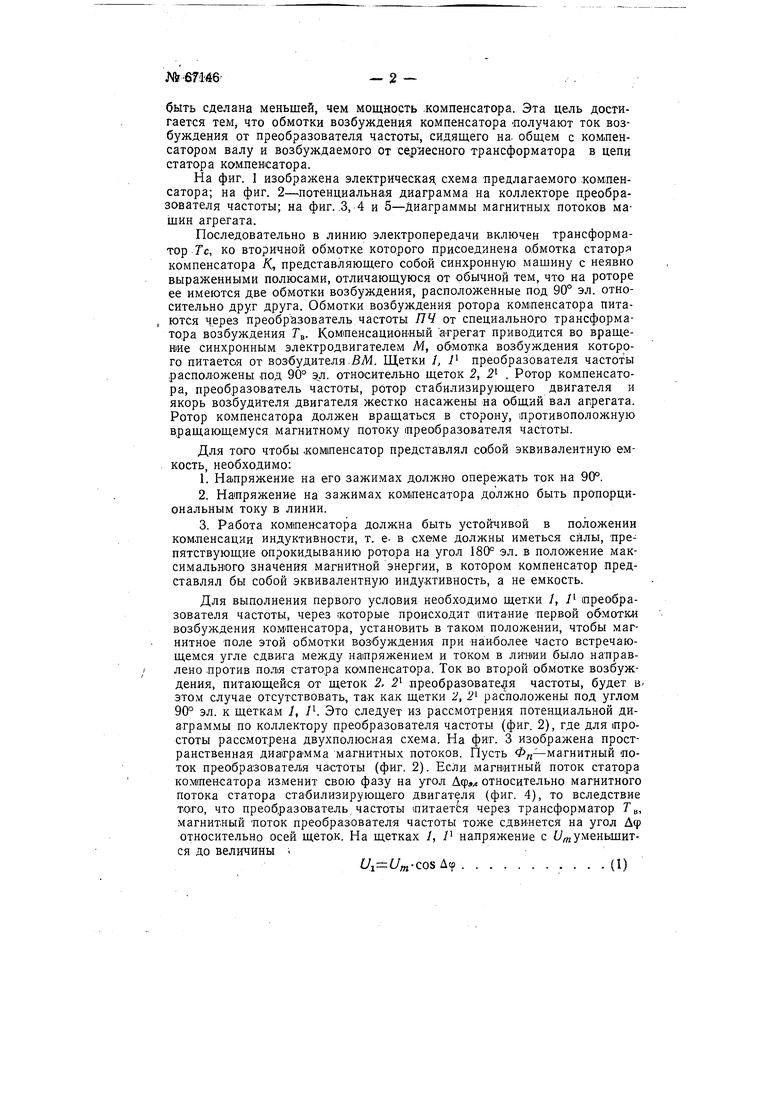
На фиг. 1 изображена электрическад схема предлагаемого комленсатора; на фиг. 2- потенциальная диаграмма на коллекторе преобразователя частоты; на фиг. .3, 4 и 5-Диаграммы магнитных потоков машин агрегата.
Последовательно в линию электропередачи включен трансформатор Гс, ко вторичной обмотке которого присоединена обмотка статоря компенсатора /(, представляющего собой синхронную машину с неявно выраженными полюсами, отличающуюся от обычной тем, что на роторе ее имеются две обмотки возбуждения, расположенные под 90° эл. относительно друг друга. Обмотки возбуждения ротора компенсатора питаются через преобразователь частоты ПЧ от специального трансформатора возбуждения Т. Компенсациониый агрегат приводится во вращение синхронным электродвигателем М, обмотка возбуждения которого питается от возбудителя.ВМ. Щетки 1, Я преобразователя частоты расположены под 90° эл. относительно щеток 2, 2 . Ротор комленсатора, преобразователь частоты, ротор стабилизирую-щего двигателя и якорь возбудителя двигателя жестко насажены на общий вал агрегата. Ротор компенсатора должен вращаться в сторону, противоположную вращающемуся магнитному потоку преобразователя частоты.
Для того чтобы .компенсатор представлял собой эквивалентную емкость, необходимо:
1.Напряжение на его зажимах должно опережать ток на 90°.
2.Напряжение на зажимах компенсатора должно быть пропорциональным току в линии.
3.Работа компенсатора должна быть устойчивой в положении комленсации индуктивности, т. е- в схеме должны иметься силы, препятствующие опрокидыванию рото.ра на угол 180° эл. в положение максимального значения магнитной энергии, в котором компенсатор представлял бы собой эквивалентную индуктивность, а не емкость.
Для выполнения первого условия необходимо щетки /, Л преобразователя частоты, через которые происходит питание первой обмотки возбуждения компенсатора, установить в таком положении, чтобы магнитное поле Этой обмотки возбуждения при наиболее часто встречающ.емся угле сдвига между напряжением и током в ливии было направлено .против поля статора компенсатора. Ток во второй обмотке возбуждения, питающейся от щеток 2, 2 преобразователя частоты, будет в/ этом случае отсутствовать, так как щетки 2, 2 расположены под углом 90° эл. к щеткам 1, Я. Это следует из рассмотрения потенциальной диа.граммы по коллектору преобразователя частоты (фиг. 2), где для простоты рассмотрена двухполюсная схема. На фит. 3 изображена пространственная диаграмма магнитных потоков. Пусть Ф -магнитный поток преобразователя частоты (фиг. 2). ЕсЛи магвитный поток статора компенсатора изменит свою фазу на угол Дф,л относительно магнитного потока статора стабилизирующего двигателя (фиг. 4), то вследствие того, что преобразователь частоты питаетЬя через трансформатор УВ, магнитный поток преобразователя частоты тоже сдвинется на угол Дф относительно осей щеток. На щетках /, Р на.пряжение с ty,уменьшится до величины i
U, f .(I) О д Т - 3 -JVs 67146 ВеличЕша напр яжения на щет.ках 2, 2 составит fy,-sinAc. .,(2) бозначим: - результирующий магнитный поток обмотки статора компенсатора; - то же, для стабилизируюпдего двигателя; Фгм - ма1гнитный поток ротора двигателя; Ф - магнитный поток, первой обмотки возбуждения компенсатора; Ф - магнитный поток второй обмотки возбуждения комленсатора; Фс - результирующий магнитный поток обмоток ротора компенсаМагнитные потоки Фё и Ф обмоток возбуждения будут в преелах прямолинейной части характеристик холостого хода пропорциональны напрлжениям f/i и /2Магнитные потоки Ф и Ф создадут равнодействующий магнитный поток ротора компенсатора, по величине равный (фиг. 4); I/ -/ ФсСОЗД р)2 + (Ф ;8{11Аю Фс . . .(3) По направлению же этот равнодействующий поток, очевидно, будет по-прежнему находитвся в оппозиции к полю статора компенсатора. аким образом, оказывается, что благодаря наличию на роторе компенсатора двух обмоток возбуждения и питанию последних через преобразователь частоты, который в схеме выполняет роль регулятора величин токов возбуждения, фаза э.д.с., генерируемой компенсатором, не зависит от взаимного положения ротора и поля статора, и при любых синхронных режимах работы является компенсирующей э-д.с. Легко видеть, что и второе условие регулирования (пропорциональность тока в линии и э.д.с. компенсатора), благодаря питанию цепи возбуждения от трансформатора Т, тоже выполняется в пределах прямолинейных участков характеристик намагничивания. Если бы не существовало неизбежного запаздывания при установлении величин токов возбуждения компенсатора вследствие наличия индуктивности в цепи возбуждения, то возможность выполнения третьего условия (устойчивость движения ротора компенсатора) не вызывала бы сом,нения. Мощность стабилизирующего синхронного двигателя М могла бы быть взятой равной мощности потерь холостого хода всего агрегата, ибо сам компенсатор не потреблял бы и не отдавал активной мощности, так как его э.д.с. мгновенно устанавливалась бы по фазе всегда под 90° эл. к то.ку. Но так как цепь возбуждения обладает индуктиввостью, то возникает вопрос о требуемой величине мощности стабилизирующего двигателя. Известно, что процесс выпадения из синхронизма синхронных мащин протекает сравнительно медленно. Это обстоятельство дает возможность предположить, что если скорость регулирования фазы э.д.с. компенсатора будет больще скорости выпадения ротора из положения минимума Магнитной энергии, то устойчивая работа агрегата может происходить при величине амплитуды моментно-угловой характеристики мотора, меньшей -максимальной мощности компенсатора. При пренебрежении потерями холостого хода пространственная диаграмма магнитных потоков при установившемся движении может быть изображена, как это показано на фиг. 3. При случайном отклонении от этого состояния равновесия, в котором система движется по инерции, на некоторый угол появится опрокидывающий момент компенсатора Мд.
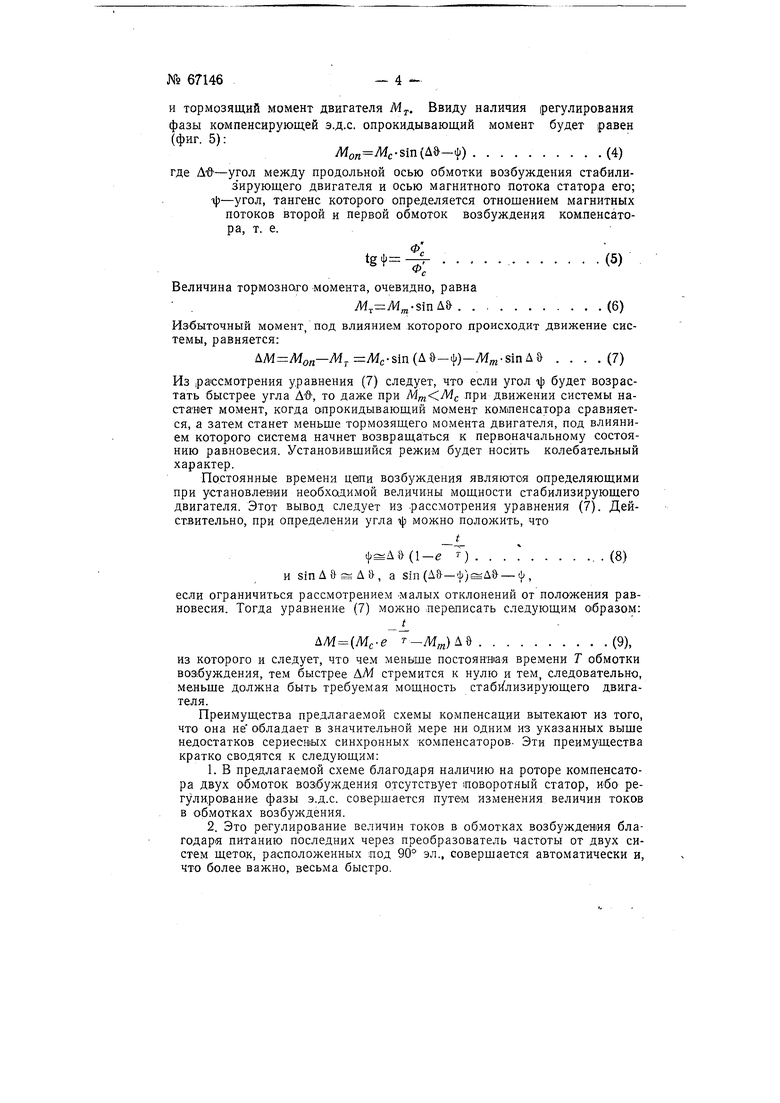
№ 67146 4 и тормозящий момент двигателя Л,,. Ввиду наличия регулирования фазы компенсирующей э.д.с. опрокидывающий момент будет равен (фиг. 5):
Л1о„ Жс-51п(Д&-ф)(4)
где Дй-угол между продольной осью обмотки возбуждения стабилизирующего двигателя и осью магнитного потока статора его;
ф-угол, тангенс которого определяется отношением магнитных
потоков второй и первой обмоток возбуждения комленсатора, т. е.
Величина тормозного момента, очевидно, равна
..81ПД8- . . ,(6)
Избыточный момент, под влиянием которого происходит движение системы, равняется:
ДМ :ЛГоп- T c-sin()-Al -sinA& . . . . (7)
Из рассмотрения уравнения (7) следует, что если угол -ф будет возрастать быстрее угла А&, то даже при Mffi.Mc при движении системы настанет момент, когда опрокидывающий момент компенсатора сравняется, а затем станет меньше тормозящего момента двигателя, под влиянием которого система начнет возвращаться к первоначальному состоянию равновесия. Установившийся режим будет носить колебательный характер.
Постоянные времени цепи возбуждения являются определяющими при установлееии необходимой величи-ны мощности стабилизирующего двигателя. Этот вывод следует из .рассмотрения уравнения (7). Действительно, при определении угла можно положить, что
и 81пД&гёД, а sin (Д&- ; Д&-|,
если ограничиться рассмотрением -малых отклонений от положения равновесия. Тогда уравнение (7) можно .переписать следующим образом:
М {Мс-е -М)(9),
из которого и следует, что чем меньше постоянная времени Т обмотки возбуждения, тем быстрее AM стремится к нулю и тем, следовательно, меньше должна быть требуемая мощность стаб1/лизирующего двигателя.
Преимуш;ества предлагаемой схемы компенсации вытекают из того, что она не обладает в значительной мере ни одним из указанных выше недостатков сериесных синхронных комленсаторов. Эти преимущества кратко сводятся к следующим:
1.В предлагаемой схеме благодаря наличию на роторе компенсатора двух обмоток возбуждения отсутствует ловоротяый статор, ибо регулирование фазы э.д.с. совершается путем изменения величин токов в об.мотках возбуждения.
2.Это регулирование величин токов в обмотках возбуждения благодаря питанию последних через преобразователь частоты от двух систем щеток, расположенных под 90° эл., совершается автоматически и, что более важно, весьма быстро.
ig . . , .(5)
(1-е ) . . . . (8)
3. Как следствие сказанного мощность приводного двигателя, которая в известных схемах сериесных синхронных компенсаторов должна быть взята большей мощности комленсатора, может в предлагаемой схеме быть взята меньше мощности компенсатора, что имеет, конечно, весьма немаловажное значение в смысле уменьшения капитальных затрат на компенсационную установку.
Предмет изобретения
Сериесный синхронный комленсатор по авт. св. № 66581, отличающийся тем, что, с целью уменьшени1Я номинальной мощности вспомогательного двигателя путем автоматического регулирования угла опережения, обмот1ки возбуждения получают ток возбуждения от .преобразователя частоты, сидящего на общем с компенсатором валу и возбуждаемого от сериесного-трансформатора в цепи статора компенсатора.
о -JYs 67146
fus I


| название | год | авторы | номер документа |
|---|---|---|---|
| Сериесный синхронный компенсатор | 1943 |
|
SU66581A1 |
| Система синхронной связи | 1946 |
|
SU69777A2 |
| Электрический привод | 1947 |
|
SU81213A1 |
| Потенциал-регулятор | 1946 |
|
SU70234A2 |
| Однофазный серверный коллекторный двигатель | 1933 |
|
SU41074A1 |
| УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОЙ КОМПЕНСАЦИИ ИНДУКТИВНОГО ПАДЕНИЯ НАПРЯЖЕНИЯ ЛИНИЙ ПЕРЕДАЧИ | 1936 |
|
SU52315A1 |
| СПОСОБ ГЕНЕРАЦИИ ПЕРЕМЕННЫХ НАПРЯЖЕНИЙ ДВУХ РАЗЛИЧНЫХ ЧАСТОТ В ТУРБОГЕНЕРАТОРЕ ТРЕХФАЗНОГО ТОКА | 2015 |
|
RU2636053C2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПОСТОЯННОГО ТОКА | 1934 |
|
SU51345A1 |
| УСТРОЙСТВО ТУРБОГЕНЕРАТОРА ТРЕХФАЗНЫХ ТОКОВ ДВУХ РАЗЛИЧНЫХ ЧАСТОТ | 2015 |
|
RU2624772C2 |
| Коллекторный двигатель | 1957 |
|
SU117336A1 |