Употребляемые во многих системах синхронной связи бесконтактные индукционные машины (бесконтактные сельсины) наряду с преимуществами, обусловленными отсутствием у них контактных колец, обладают двумя существенными недостатками: а) сложностью конструкции вследствие наличия разрезного ротора и дополнительного магнитопровода, служащего для проведения магнитного потока возбуждения, и б) невозможностью, в силу самого принципа работы, применения индукционных машин в системах синхронной связи на трехфазном токе.
Для устранения этих недостатков и использования машин с магнитной системой по типу обычной асинхронной мащины предлагается, согласно изобретению, применить в качестве датчика и приемника мащины по авт. св. № 67799 с двумя обмотками на статоре, имеющими разное (кратное и четное число раз) число полюсов и используемыми одна - в качестве первичной, т. е. для приключения к питающей цепи, а другая - в качестве вторичной, т. е. для приключения к вторичной обмотке другой машины, и с двумя такими же обмотками на роторе, включенными одна на другую. В системе могут быть применены машины с многофазной (например, трехфазной) первичной обмоткой.
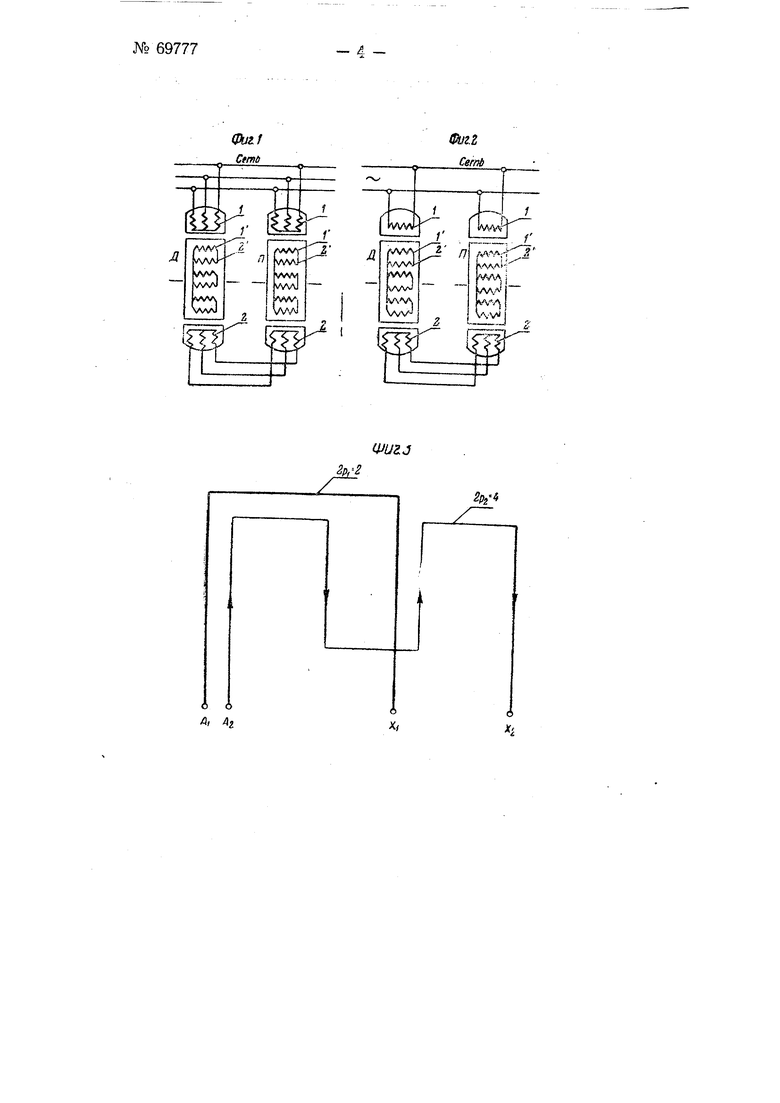
Принципиальная схема предлагаемой системы синхронной связи на трехфазном токе показана на фиг. 1, а на однофазном - на фиг. 2. На фиг. 3 приведена схема обмоток индукционной машины (для одной фазы), где А и AZ - начала обмоток, a.Xi и Х - концы.
Бесконтактная индукционная машина состоит из статора и ротора, по конструкции аналогичных статору и ротору обычной асинхронной мащины. На статоре, как и на роторе, размещены по две системы обмоток /, / и 2, 2. Одна система обмоток, например 1-/, выполняется двухполюсной (2р 2), вторая - четырехполюсная ).
№ 69777- 2 При применении индукционных машин в системах трехфазного тока обе обмотки статора как датчика Л, так и приемника Я (фиг. 1) делаются многофазными (например, трехфазными), причем в сеть переменного тока может включаться любая из них. Вторая же обмотка статора датчика соединяется с аналогичной обмоткой приемника по схеме, приведенной на фиг. 1.
В случае применения индукционных машин в системах синхронной связи однофазного тока обмотка 7, включаемая в сеть, делается однофазной (фиг. 2). Трехфазные же статорные обмотки 2 датчика и приемника соединяются между собой так же, как и в предыдущем случае.
Что касается обмоток ротора, то они как у трехфазных, так и у однофазных машин выполняются трехфазными и соединяются между собой так, чтобы в случае протекания по ним токов, сдвинутых по фазе на одну треть периода, враш,ение двухполюсного и четырехполюсного магнитных полей происходило в одну сторону.
Принцип работы индукционной машины основан на том, что коэффициент взаимной индукции между двухполюсными и четырехполюсными обмотками равен нулю (фиг. 3) и, кроме того, на том, что положение ротора определяет у трехфазной машины сдвиг по фазе между э.д.с. статорных обмоток 1 и 2, а однофазной - величину э.д.с. в каждой из фаз второй обмотки 2 статора.
Из-за равенства нулю упомянутого коэффициента взаимоиндукции магнитная связь между обмотками статора / и 2,осуществляется не непосредственно, а через промежуточное звено в виде обмоток ротора.
Рассмотрим работу системы синхронной связи с применением трехфазных бесконтактных индукционных машин (фиг. 1).
При повороте ротора машины на угол 9 сдвиг по фазе между э.д.с. статорных обмоток его изменится на угол:
9i3 9i2-f Г2з р10-Р2е (р1-Рг) е,(1)
где - угол сдвига между э.д.с. статорной обмотки, включенной в сеть, и э.д.с. в роторной цепи, О23 - угол сдвига между э.д.с. роторной цепи и э.д.с. второй обмотки статора, соединенной с обмоткой другой индукционной машины.
В рассматриваемом случае числа пар полюсов обмоток равны р,, и , следовательно,
е ,(2)
Знак минус указывает на то, что сдвиг ротора по направлению вращения двухполюсного поля вызывает отставание по фазе э.д.с., индуктируемой во второй обмотке статора, по отношению к э.д.с. обмотки, включенной в сеть.
При одинаковом положении роторов датчика и приемника относительно осей обмоток статоров э.д.с., наводимые во вторых обмотках статора, будут в соответствующих фазовых обмотках равны и противоположны по направлению и, следовательно, никаких уравнительных токов между датчиком и приемником возникать не будет. Если же ротор датчика повернуть на некоторый угол относительно ротора приемника, то в цепи возникнет уравнительный ток и появится вращающий момент, стремящийся повернуть ротор приемника в положение, одинаковое с положением ротора датчика. Система в пределах одного оборота обладает весьма ценным свойством самосинхронизации, что видно из равенства (2),. предлагаемая мащина эквивалентна двухполюсной машине.. , ,/..
Рассмотрим теперь работу машины в,.однофазной системе, синхрон ной связи (фиг. 2).
Однофазный переменный ток создает в первых (двухполюсных обмотках статора пульсирующий однофазный поток, который индуктирует в цепи ротора три э.д.с., совпадающие по фазе, но отличающиеся друг от друга по величине, которая зависит от положения роторных обмоток относительно обмоток статора. Протекание токов по обмоткам ротора приведет к появлению четырехполюсного пульсирующего магнитного поля, которое наведет э.д.с. во второй обмотке 2 статора. При одинаковых положениях роторов датчика и приемника эти (третичные) э.д.с. во вторых стоторных обмотках уравновешиваются, и в цепи ток отсутствует. При сдвигании же одного из роторов на какой-либо угол величины э.д.с. в соответственных статорных обмотках 2 оказываются различными (по фазе они по-прежнему совпадают, так как система однофазная), в силу чего возникает уравнительный ток, вызывающий машинах вращающие моменты, стремящиеся, как и в трехфазной системе, привести роторы в одинаковое положение по отнощению к обмоткам статоров.
Результаты проведенных испытаний системы под вердили высказанные выше соображения. Так, при повороте ротора датчика на один оборот ротор четырехполюсного асинхронного двигателя делал лишь пол-оборота, что и должно было быть, так как предлагаемая бесконтактная машина (бесконтактный сельсин), как уже указывалось выше, эквивалентна двухполюсной машине.
Предмет изобретения
1.Система синхронной связи с бесконтактными индукционными машинами (бесконтактные сельсины), отличающаяся тем, что, с целью использования машин с магнитной системой по типу обычной асинхронной машины, в качестве датчика и приемника применены машины по авт. св. № 67799 с двумя обмотками на статоре, имеющими разное (кратное и четное число раз) число полюсов и используемыми одна - в качестве первичной, т. е. для приключения к питающей цепи, а другая - в качестве вторичной, т. е. для приключения к вторичной обмотке другой машины, и с двумя такими же обмотками на роторе, включенными одна на другую.
2.В системе по п. 1 применение машин с многофазной (например, трехфазной) первичной обмоткой.
- 3 -№ 69777

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический привод | 1947 |
|
SU81213A1 |
| Бесконтактный сельсин | 1947 |
|
SU75462A2 |
| Сериесный синхронный компенсатор | 1943 |
|
SU67146A1 |
| Потенциал-регулятор | 1946 |
|
SU70234A2 |
| Устройство для однофазной индукционной синхронной передачи угла | 1937 |
|
SU55166A1 |
| Одномашинный асинхронный преобразователь частоты | 1946 |
|
SU70031A2 |
| РЕВЕРСИВНЫЙ БЕСКОНТАКТНЫЙ ТАХОГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 1965 |
|
SU173485A1 |
| Бесконтактный сельсин и фазорегулятор | 1939 |
|
SU56183A1 |
| Индукционная система синхронной передачи угла поворота | 1935 |
|
SU48684A1 |
| Следящий привод | 1941 |
|
SU67550A1 |